一种玻璃纤维拉挤板外观质量检测系统及其检测方法与流程
1.本发明涉及外观质量检测系统技术领域,尤其是涉及一种玻璃纤维拉挤板外观质量检测系统及其检测方法。
背景技术:
2.玻璃纤维拉挤工艺是指玻纤粗纱或者织物在外力牵引下,经过浸胶,挤压成型,加热固化,定长切割形成各种型材。玻璃纤维拉挤板是在该工艺下生产的用于风力发电叶片的主要材料,板材中间是浸胶后的玻纤纱,表面是贴附的脱模布,但在生产过程中,由于工艺,原料等因素影响,产品会出现各种缺陷,例如:脱模布跑偏、贴附不良、发亮、褶皱/缺失、异物、缺料、空洞、沟槽、颜色污染等。
3.目前玻璃纤维拉挤板在生产过程中,质量控制以人眼观察为主,每名操作工负责一台或多台拉挤设备,使用肉眼观察拉挤板表面的质量,如果发现缺陷,则进行相应的操作,
4.人工观察拉挤板表面缺陷受到人员心里,生理各方面的影响,难以保证检测质量,造成很大浪费和客户投诉;同时玻璃纤维拉挤板的工作车间还存在温度高、粉尘大和环境差等缺陷,生产厂家越来越难雇佣到操作人员等问题。因此,如何提高玻璃纤维拉挤板的表面质量,减少工人的参与度成为了本领域技术人员亟待解决的技术问题。
技术实现要素:
5.有鉴于此,本发明的目的之一在于提供一种玻璃纤维拉挤板外观质量检测系统,以解决现有技术中在玻璃纤维拉挤板在生产过程中,质量控制以人眼观察为主,导致玻璃纤维拉挤板的表面质量层析不齐的技术问题。
6.本发明的目的之二在于提供一种玻璃纤维拉挤板外观质量检测方法。
7.为了实现上述目的之一,本发明提供了一种玻璃纤维拉挤板外观质量检测系统,包括光源、图像采集组件和工业控制计算机,所述光源和所述图像采集组件分布于拉挤板的同侧,所述光源用于照射所述拉挤板,所述图像采集组件用于采集拉挤板的图像,所述图像采集组件与所述工业控制计算机电连接;
8.所述工业控制计算机包括顺次电连接的用于将采集的所述拉挤板的图像数字化的图像数字化模块、用于处理数字图像的数字图像处理模块、用于判断所述拉挤板是否存在缺陷的智能判断决策模块。
9.根据一种可选实施方式,所述工业控制计算机还包括执行模块,所述执行模块与所述智能判断决策模块电连接,当所述智能判断决策模块检测到所述拉挤板存在缺陷时,将信号传递给所述执行模块,所述执行模块进行执行动作。
10.根据一种可选实施方式,所述执行模块包括通用控制板和报警灯,当所述智能判断决策模块检测到所述拉挤板存在缺陷时,所述智能判断决策模块通过串口通信线将信号传递给所述通用控制板,所述通用控制板控制所述报警灯报警。
11.根据一种可选实施方式,所述图像采集组件包括表面缺陷采集组件、内部缺陷采集组件和脱模布位置采集组件,所述表面缺陷采集组件、所述内部缺陷采集组件和所述脱模布位置采集组件在所述拉挤板的同侧依次排布。
12.根据一种可选实施方式,所述光源设为第一条形led光源,所述表面缺陷采集组件设为第一相机,所述第一条形led光源的发光方向朝向所述拉挤板,所述第一相机的拍摄方向朝向所述拉挤板,所述第一条形led光源沿着所述拉挤板的宽度方向设置。
13.根据一种可选实施方式,所述第一条形led光源与所述拉挤板呈45度角,所述第一相机与所述拉挤板呈90度角。
14.根据一种可选实施方式,所述光源设为第二条形led光源,所述内部缺陷采集组件设为第二相机,所述第二条形光源与所述第二相机置于所述拉挤板的同侧,所述第二条形led光源沿着所述拉挤板的宽度方向设置,所述第二条形led光源的发光方向朝向所述拉挤板,所述第二相机的拍摄方向朝向所述拉挤板。
15.根据一种可选实施方式,所述第二条形led光源与所述拉挤板平行,所述第二相机与所述拉挤板呈90度角。
16.根据一种可选实施方式,所述光源设为圆筒形led光源,所述脱模布位置采集组件设为第三相机,所述圆筒形led光源位于所述拉挤板的边缘,且发光方向朝向所述拉挤板,所述第三相机位于所述拉挤板的边缘,且拍摄方向朝向所述拉挤板。
17.为了实现上述目的之二,本发明提供了一种玻璃纤维拉挤板外观质量检测方法,包括:
18.步骤s101:拉挤板运动到相对的两个第一条形led光源之间时,拉挤板上下两侧的第一条形led光源呈45
°
角照射拉挤板的表面,第一相机在拉挤板的相对两侧垂直获取拉挤板表面的图像;
19.步骤s102:拉挤板运动到相对的第二条形led光源和第二相机之间时,第二条形led光源上下分别垂直照射拉挤板,置于第二条形led光源对侧的第二相机垂直获取拉挤板内部的图像;
20.步骤s103:拉挤板运动到上下成对的圆筒形led光源之间时,圆筒形led光源呈45
°
角照射拉挤板的边缘,第三相机呈45度角分别从上下两侧获取拉挤板边缘的图像;
21.步骤s104:利用千兆网将步骤s101获取的拉挤板表面的图像、步骤s102获取的拉挤板内部的图像和步骤s103获取的拉挤板边缘的图像传输至工业控制计算机,工业控制计算机对采集到的拉挤板的图像进行处理,当拉挤板的图像存在缺陷,则进行报警提示。
22.本发明提供的玻璃纤维拉挤板外观质量检测系统,具有以下技术效果:
23.该种拉挤板外观质量检测系统,主要由光源、图像采集组件和工业控制计算机构成,光源和图像采集组件分布于拉挤板的同侧,光源用于照射拉挤板,图像采集组件用于采集拉挤板的图像,图像采集组件与工业控制计算机电连接,工业控制计算机包括顺次电连接的用于将采集的拉挤板的图像数字化的图像数字化模块、用于处理数字图像的数字图像处理模块、用于判断拉挤板是否存在缺陷的智能判断决策模块,本发明通过工业控制计算机内的各个处理模块之间以及与图像采集组件的配合,替代肉眼观察,做到24小时不间断检测,不漏检,提高了拉挤板质量,大大降低了劳动强度。
附图说明
24.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
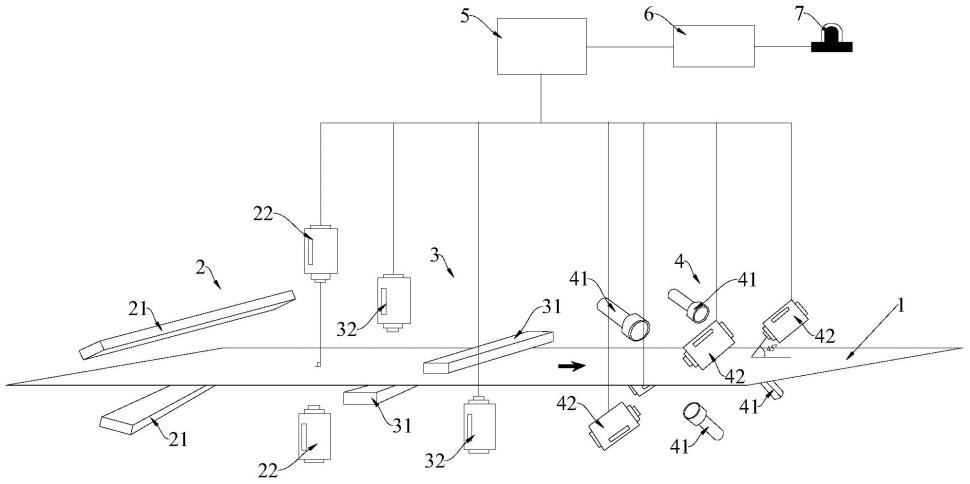
25.图1是本发明一实施例玻璃纤维拉挤板外观质量检测系统的结构示意图;
26.图2是图1中玻璃纤维拉挤板外观质量检测系统的图像处理流程图;
27.图3是拉挤板表面正常图像;
28.图4是拉挤板表面脱模布褶皱异常图像;
29.图5是拉挤板表面脱模布跑偏异常图像;
30.图6是拉挤板表面脱模布贴附不良异常图像;
31.图7是拉挤板表面脱模布表面污渍异常图像;
32.图8是拉挤板内部正常图像;
33.图9是拉挤板内部干丝异常图像;
34.图10是拉挤板内部毛团异常图像;
35.图11是拉挤板内部异物异常图像;
36.图12是拉挤板边缘有无脱模布对比图像。
37.其中,图1-图12:
38.1、拉挤板;
39.2、表面缺陷采集组件;21、第一条形led光源;22、第一相机;
40.3、内部缺陷采集组件;31、第二条形led光源;32、第二相机;
41.4、脱模布位置采集组件;41、圆筒形led光源;42、第三相机;
42.5、工业控制计算机;51、图像数字化模块;52、数字图像处理模块;53、智能判断决策模块;54、执行模块;
43.6、通用控制板;7、报警灯。
具体实施方式
44.为使本发明的目的、技术方案和优点更加清楚,下面将对本发明的技术方案进行详细的描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本发明所保护的范围。
45.在本发明的描述中,需要说明的是,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
46.在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连
接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可视具体情况理解上述术语在本发明中的具体含义。
47.下面结合具体的附图1对本发明的技术方案进行详细的说明。
48.本发明提供的拉挤板1外观检测设备,用于检测玻璃纤维拉挤板1的缺陷,具体指检测脱模布跑偏、贴附不良、发亮、褶皱/缺失、异物、缺料、空洞、沟槽、颜色污染等。
49.如图1所示,本发明的检测设备包括光源、图像采集组件和工业控制计算机5,光源和图像采集组件分布于拉挤板1的同侧,光源用于照射拉挤板1,使拉挤板1达到一定的亮度,而图像采集组件则用于采集拉挤板1的图像,同时图像采集组件与工业控制计算机5电连接,以将采集到的图像向外传输。
50.本发明的检测设备以机器视觉技术为核心技术,采用光源将拉挤板1照亮,图像采集组件获取拉挤板1图像,将采集到得到的拉挤板1图像利用千兆网传输至工业控制计算机5,工业控制计算机5上采用相应的检测软件和图像处理算法对采集到的拉挤板1图像进行处理,如果发现采集到的拉挤板1图像中存在缺陷,则进行报警提示。
51.如图1所示,图像采集组件包括表面缺陷采集组件2、内部缺陷采集组件3和脱模布位置采集组件4,表面缺陷采集组件2用于采集拉挤板1的表面缺陷,内部缺陷采集组件3用于采集拉挤板1的内部缺陷,而脱模布位置采集组件4则用于采集脱模布在拉挤板1边缘的位置,表面缺陷采集组件2、内部缺陷采集组件3和脱模布位置采集组件4在拉挤板1的同侧依次排布。
52.如图1和图2所示,工业控制计算机5包括图像数字化模块51、数字图像处理模块52和智能判断决策模块53,图像数字化模块51、数字图像处理模块52和智能判断决策模块53顺次电连接,图像数字化模块51用于将采集的拉挤板1的图像数字化,数字图像处理模块52用于处理数字图像,智能判断决策模块53用于判断拉挤板1是否存在缺陷。
53.另外,工业控制计算机5还包括执行模块54,执行模块54与智能判断决策模块53电连接,当智能判断决策模块53检测到拉挤板1存在缺陷时,将信号传递给执行模块54,执行模块54进行执行动作。
54.而执行模块54包括通用控制板6和报警灯7,当智能判断决策模块53检测到拉挤板1存在缺陷时,智能判断决策模块53通过串口通信线将信号传递给通用控制板6,通用控制板6控制报警灯7报警,如果通用控制板6检测到拉挤板1存在缺陷,报警灯7发出报警指令,如果通用控制板6没有检测到拉挤板1存在缺陷,报警灯7不报警指令。
55.本发明的工业控制计算机5提高了生产的灵活性和自动化程度,在一些不适于人工作业的危险工作环境或者人工视觉难以满足要求的场合,常用机器视觉来替代人工视觉;同时,在大批量重复性工业生产过程中,用机器视觉检测方法可以大大提高生产的效率和自动化程度。目前随着视觉传感器价格逐步降低,数字图像处理技术不断发展,采用机器视觉进行表面缺陷检测,工件定位,目标识别等设备已经普及到工业生产的各个领域。
56.具体的:
57.(1)拉挤板1上下表面缺陷检测:
58.与表面缺陷采集组件2对应的光源优选为第一条形led光源21,第一条形led光源21沿着拉挤板1的宽度方向设置,表面缺陷采集组件2优选为第一相机22,第一条形led光源21包括两根,两根第一条形led光源21对称设于拉挤板1的上下两个表面,并且两根第一条
形led光源21均与拉挤板1呈45度角,并且与拉挤板1之间的间隔约200mm,其用于照射拉挤板1的表面;第一相机22包括两台,两台第一相机22分别位于拉挤板1的上下两个表面,第一相机22与拉挤板1呈90度角,其与拉挤板1之间的间距约350mm。
59.两根第一条形led光源21分别位于拉挤板1上下表面约200mm处,与拉挤板1呈45度夹角,将拉挤板1照亮;两台第一相机22分别位于拉挤板1上下表面,垂直于拉挤板1,距离拉挤板1约350mm,采集拉挤板1表面图像,第一相机22和第一条形led光源21在拉挤板1同侧,形成反射图像采集方式,图3为正常的玻璃纤维拉挤板1表面图像,图4-7为异常的玻璃纤维拉挤板1表面图像,图4为脱模布褶皱,图5为脱模布跑偏,图6为脱模布贴附不良,图7为脱模布表面污渍。
60.(2)拉挤板1内部缺陷检测:
61.与内部缺陷采集组件3对应的光源优选为第二条形led光源31,同样的,第二条形led光源31包括两根,两根第二条形led光源31位于拉挤板1的两侧,并且一前一后布置,第二条形led光源31与拉挤板1平行,并且沿着拉挤板1的宽度方向设置,内部缺陷采集组件3优选为第二相机32,第二相机32也包括两台,第二相机32与拉挤板1呈90度角,第二条形led光源31与第二相机32成对出现,对应的第二条形led光源31和第二相机32置于拉挤板1的两侧,第二条形led光源31的发光方向朝向拉挤板1,第二相机32的拍摄方向朝向拉挤板1。
62.两根第二条形led光源31分别位于拉挤板1上下表面约20mm处,垂直照射拉挤板1表面,两台第二相机32分别位于拉挤板1上下表面距离拉挤板1约200mm处,垂直拍摄拉挤板1内部图像,形成透射采集方式,采集到的图像如图8-11所示,图8为正常的拉挤板1内部图像,图9为内部干丝异常,图10为内部毛团异常,图11为内部异物异常,
63.(3)拉挤板1脱模布位置检测:
64.与脱模布位置采集组件4对应的光源优选为圆筒形led光源41,脱模布位置采集组件4优选为第三相机42,圆筒形led光源41位于拉挤板1的边缘,且发光方向朝向拉挤板1,第三相机42位于拉挤板1的边缘,且拍摄方向朝向拉挤板1。
65.具体的,四个平行圆筒形led光源41分别位于拉挤板1上下表面的四个边上,距离板面200mm,与板面呈45度夹角,将板面边缘照亮,四台第三相机42分别位于拉挤板1上下表面的四个边上,第三相机42距离拉挤板1约350mm,以45度夹角拍摄拉挤板1边缘图像。
66.第三相机42和圆筒形led光源41夹角约为90度,这样采集到的图像特点是脱模布灰度值很高,而没有脱模布的板材灰度值很低,依据灰度值的差异即可识别脱模布和板材边缘的距离。采集到的图像如图12所示,图中明显可见左侧框内脱模布亮度很高,右侧框内无脱模布的板面亮度较低。
67.本发明还提供了一种玻璃纤维拉挤板1外观质量检测方法,包括:
68.步骤s101:拉挤板1运动到相对的两个第一条形led光源21之间时,拉挤板1上下两侧的第一条形led光源21呈45
°
角照射拉挤板1的表面,第一相机22在拉挤板1的相对两侧垂直获取拉挤板1表面的图像,检测图像如图3-7所示;
69.步骤s102:拉挤板1运动到相对的第二条形led光源31和第二相机32之间时,第二条形led光源31上下分别垂直照射拉挤板1,置于第二条形led光源31对侧的第二相机32垂直获取拉挤板1内部的图像,检测图像如图8-11所示;
70.步骤s103:拉挤板1运动到上下成对的圆筒形led光源41之间时,圆筒形led光源41
呈45
°
角照射拉挤板1的边缘,第三相机42呈45度角分别从上下两侧获取拉挤板1边缘的图像,检测图像如图12所示;
71.步骤s104:利用千兆网将步骤s101获取的拉挤板1表面的图像、步骤s102获取的拉挤板1内部的图像和步骤s103获取的拉挤板1边缘的图像传输至工业控制计算机5,工业控制计算机5对采集到的拉挤板1的图像进行处理,当拉挤板1的图像存在缺陷,则进行报警提示。
72.需要说明的是,本发明对于第一步、第二步和第三步之间的顺序不作限定,例如第二步可以在第一步之前,第三步也可以在第一步之前。
73.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1