一种海上风电有缆水下机器人定位装置及其定位方法与流程
1.本发明涉及水下机器人技术领域,特别是涉及一种海上风电有缆水下机器人定位装置及其定位方法。
背景技术:
2.目前,有缆水下机器人在水下探测、水下观察等方面应用日趋广泛。这类水下机器人的总体价格不高,通常不具备水下定位功能,在一些需要获取水下位置的作业任务时,如获取水下沉船的位置时,这类水下机器人通常不能满足作业要求。而现有的带有水下定位功能的有缆水下机器人通常采用基线定位,但是基线定位装置价格昂贵,严重制约了基线定位装置在水下机器人中的应用。
3.授权公告号为cn109188484a的中国专利公开了一种海上风电有缆水下机器人定位装置,包括定位线控制装置和水面定位装置,所述定位线控制装置安装在水下机器人上,所述水面定位装置包括可漂浮在水面上的浮体,所述浮体内设置有gps信号发射器,所述定位线控制装置包括定位线和可收卷所述定位线的卷筒,所述定位线的一端卷绕在所述卷筒上,另一端与所述浮体连接,本发明公开了一种有缆水下机器人定位方法,包括上述的有缆水下机器人定位装置,其特征在于,当水下机器人下潜到目的位置、且需要获取水下机器人在水下的地理位置时,所述水上控制器控制启动电动机,电动机驱动卷筒产生收线动作,定位线对浮体施加向下的拉力,当定位线产生的拉力等于所述浮体的最大浮力时,电动机停止转动,延时δt,第一次延时后,所述水上控制器控制启动电动机,电动机驱动卷筒进行第二次产生收线动作,其具有通过电两次延时以及定位线收卷动作,让浮球尽可能处于水下机器人的正上方,从而提高水下机器人的定位精度等优点。
4.但是上述已公开方案存在如下不足之处:上述方案中通过多次定位方式提高定位精度,当定位坐标产生偏差时,多组定位数据偏差值相同,因此无法进行减少误差的作用,反而会产生误差积累,同时上述方案中缺少在实际使用当中应急上浮装置,因此在实际使用过程当中因为不确定因素会产生重大损失。
技术实现要素:
5.本发明的目的是针对背景技术中存在的技术问题,本发明提出一种海上风电有缆水下机器人定位装置及其定位方法,本发明通过遥控的方式能够在本方案中主体装置位于水中时进行精确遥控同时便于工作人员操作使用,同时在特殊紧急状态下本装置能够通过浮力快速上升,从而避免了数据丢失或者经济损失。
6.一方面,本发明提出了一种海上风电有缆水下机器人定位装置,包括气囊、保护罩、升降涡轮、连接杆、通讯接口、防水罩、摄像头、转动支架、转向电机、转向涡轮、支撑支架、升降电机和定位装置;
7.气囊上设有通孔;通孔内部与保护罩连接;保护罩内壁与升降涡轮转动连接;升降涡轮设置于升降电机连接;气囊底部与转动支架连接;转动支架顶部与连接杆连接;连接杆
呈倒u字型;连接杆上设有多组固定孔;多组固定孔等间距分布;转动支架侧面与防水罩连接;防水罩远离转动支架的一端与摄像头连接;防水罩和摄像头对称设置于转动支架两侧;转动支架边缘上设有多组转动连接件,多组转动连接件与通讯接口控制连接;通讯接口设置于转动支架顶部;转动连接件顶部与转向电机连接;转向电机输出端与转向涡轮连接;转动支架上设有多组转动连接件、转向电机和转向涡轮;多组转动连接件、转向电机和转向涡轮呈圆周分布于转动支架四周;转动支架底部与支撑支架连接。
8.优选的,气囊内部设有压缩气罐,气囊底部设有单向阀,单向阀联通方向朝向气囊外端面,气囊顶部上设有注水口,注水口上设有橡胶密封圈。
9.优选的,通讯接口朝向正上方;转动支架顶部上设有中控模块,通讯接口与中控模块控制连接,中控模块与摄像头通讯连接。
10.优选的,支撑支架上设有缓冲装置,缓冲装置底部上设有减震垫,减震垫朝向垂直正下方。
11.优选的,升降涡轮与升降电机对称设置于连接杆两侧,多组升降电机为同步电机。
12.优选的,定位装置安装位置与转动支架几何中心位置之间存在距离,定位装置上设有密封件,密封件设置于转动支架与定位装置接缝处。
13.优选的,支撑支架对称于转动支架底部设置,多组支撑支架向外倾斜。
14.另一方面,本发明提出了一种海上风电有缆水下机器人定位装置的定位方法,包括如下步骤:s1、定位装置内部设有发射模块、定位模块和时钟模块,时钟模块与定位模块控制连接;定位模块与发射模块通讯连接,定位模块通过发射模块与水上接收装置通讯连接;s2、当定位装置在转动支架的带动下,进入到目标水域后,转向电机开始工作,多组转向电机与转向涡轮的组合能够使得转动支架在目标水域范围内进行圆周运动,通过摄像头,能够确保圆周运动的稳定性,当转动支架已经进入到圆周运动状态下时,定位装置开始持续发出定位信号,水面上设有接收装置,接收装置与定位装置通讯连接,接收装置通过接受定位装置发送的定位坐标进行整合处理,从而绘制出定位装置的运行轨迹;s3、通过地面上绘制出的运行汇集与标准正圆的形状进行对比能够判断出水下是否存在坐标误差,若存在通过圆形不同方向的变形程度能够判断出误差方向和大小,从而将修正值加入定位装置发送的定位信号当中。
15.本发明的上述技术方案具有如下有益的技术效果:
16.本发明通过遥控的方式能够在本方案中主体装置位于水中时进行精确遥控同时便于工作人员操作使用,同时在特殊紧急状态下本装置能够通过浮力快速上升,从而避免了数据丢失或者经济损失,通过本方案中主体装置底部的支撑支架能够在与水中底部接触时提高本装置的稳定性,通过本装置中底部的定位装置能够在本装置进行定位过程当中采用十字定位法提高本装置的准确位置,从而能够避免在同一维度下的坐标误差。
附图说明
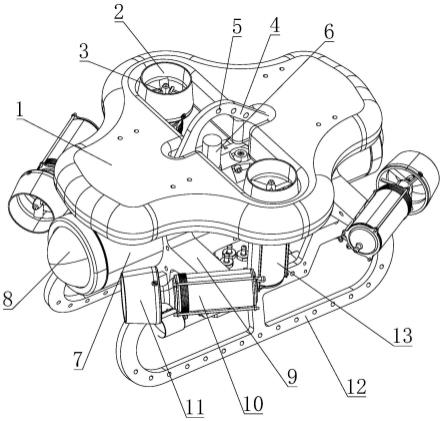
17.图1为本发明一种海上风电有缆水下机器人定位装置及其定位方法的实施例的结构示意图;
18.图2为本发明提出的一种海上风电有缆水下机器人定位装置及其定位方法的正视图;
19.图3为本发明提出的一种海上风电有缆水下机器人定位装置及其定位方法的侧视图;
20.附图标记:1、气囊;2、保护罩;3、升降涡轮;4、连接杆;5、固定孔;6、通讯接口;7、防水罩;8、摄像头;9、转动支架;10、转向电机;11、转向涡轮;12、支撑支架;13、升降电机;14、定位装置。
具体实施方式
21.实施例一
22.如图1-3所示,本发明提出的一种海上风电有缆水下机器人定位装置,包括气囊1、保护罩2、升降涡轮3、连接杆4、通讯接口6、防水罩7、摄像头8、转动支架9、转向电机10、转向涡轮11、支撑支架12、升降电机13和定位装置14;
23.气囊1上设有通孔;通孔内部与保护罩2连接;保护罩2内壁与升降涡轮3转动连接;升降涡轮3设置于升降电机13连接;气囊1底部与转动支架9连接;转动支架9顶部与连接杆4连接;连接杆4呈倒u字型;连接杆4上设有多组固定孔5;多组固定孔5等间距分布;转动支架9侧面与防水罩7连接;防水罩7远离转动支架9的一端与摄像头8连接;防水罩7和摄像头8对称设置于转动支架9两侧;转动支架9边缘上设有多组转动连接件,多组转动连接件与通讯接口6控制连接;通讯接口6设置于转动支架9顶部;转动连接件顶部与转向电机10连接;转向电机10输出端与转向涡轮11连接;转动支架9上设有多组转动连接件、转向电机10和转向涡轮11;多组转动连接件、转向电机10和转向涡轮11呈圆周分布于转动支架9四周;转动支架9底部与支撑支架12连接;通讯接口6朝向正上方;转动支架9顶部上设有中控模块,通讯接口与中控模块控制连接,中控模块与摄像头8通讯连接;支撑支架12上设有缓冲装置,缓冲装置底部上设有减震垫,减震垫朝向垂直正下方;升降涡轮3与升降电机13对称设置于连接杆4两侧,多组升降电机13为同步电机;定位装置14安装位置与转动支架9几何中心位置之间存在距离,定位装置14上设有密封件,密封件设置于转动支架9与定位装置14接缝处;支撑支架12对称于转动支架9底部设置,多组支撑支架12向外倾斜。
24.本实施例中,通过本装置能够有效的提高在水下作业过程的准确性,当本装置处于工作状态时,通过转向电机10带动转向涡轮11的组合能够在本装置处于水中环境时,进行转向,转向过程中,转动支架9底部的定位装置14相对于本装置几何中心处做匀速圆周运动,此时通过定位装置14与地面上接收装置的信号接收过程,能够对处于规则运动轨迹下定位装置14所发出的定位信号进行计算,当所接收信号位置组合形状轨迹为圆形时,说明此时水下环境不存在信号干扰和误差,当所接收信号位置组合形状轨迹不为圆形时,通过圆形向具体方位变形的程度,对接受到的定位坐标进行数值修复,从而使得本装置接受到的信号轨迹趋向于正圆,此时将修正值重新带入定位装置14所发射出的定位信号当中,即为当前本装置在水中的真实位置,通过多组转向电机10和转向涡轮11能够有效的保证了本装置的运动轨迹准确性。
25.实施例二
26.如图2-3所示,本发明提出的一种海上风电有缆水下机器人定位装置,相较于实施例一,本实施例中,气囊1内部设有压缩气罐,气囊1底部设有单向阀,单向阀联通方向朝向气囊1外端面,气囊1顶部上设有注水口,注水口上设有橡胶密封圈。
27.本发明的一个实施例中,当本装置在准备状态时,通过气囊顶部的注水口向气囊内部加注液体,从而提高本装置的整体密度,避免下潜过程中存在过大阻力,当本装置处于紧急状态且无法进行联络时,本装置会自动触发压缩气罐,压缩气罐通过释放大量气体,通过气体密度大于液体密度的远离气体将气囊中的液体从底部的单向阀向外挤出,从而使得气囊1内部密度降低,提高了本装置的整体浮力,使得本装置能够在紧急状态下快速上浮保证了本装置的内部数据稳定的同时,便于工作人员进行打捞回收。
28.实施例三
29.如图1-3所示,基于上述一种海上风电有缆水下机器人定位装置的定位方法,包括以下步骤:
30.s1、定位装置14内部设有发射模块、定位模块和时钟模块,时钟模块与定位模块控制连接;定位模块与发射模块通讯连接,定位模块通过发射模块与水上接收装置通讯连接;
31.s2、当定位装置14在转动支架9的带动下,进入到目标水域后,转向电机10开始工作,多组转向电机10与转向涡轮11的组合能够使得转动支架9在目标水域范围内进行圆周运动,通过摄像头8,能够确保圆周运动的稳定性,当转动支架9已经进入到圆周运动状态下时,定位装置14开始持续发出定位信号,水面上设有接收装置,接收装置与定位装置14通讯连接,接收装置通过接受定位装置14发送的定位坐标进行整合处理,从而绘制出定位装置14的运行轨迹;
32.s3、通过地面上绘制出的运行汇集与标准正圆的形状进行对比能够判断出水下是否存在坐标误差,若存在通过圆形不同方向的变形程度能够判断出误差方向和大小,从而将修正值加入定位装置14发送的定位信号当中。
33.本实施例能够实现高精度顶为本方案主体装置在水下的位置,当定位装置14在转动支架9的带动下,进入到目标水域后,转向电机10开始工作,多组转向电机10与转向涡轮11的组合能够使得转动支架9在目标水域范围内进行圆周运动,通过摄像头8,能够确保圆周运动的稳定性,当转动支架9已经进入到圆周运动状态下时,定位装置14开始持续发出定位信号,水面上设有接收装置,接收装置与定位装置14通讯连接,接收装置通过接受定位装置14发送的定位坐标进行整合处理,从而绘制出定位装置14的运行轨迹,通过地面上绘制出的运行汇集与标准正圆的形状进行对比能够判断出水下是否存在坐标误差,若存在通过圆形不同方向的变形程度能够判断出误差方向和大小,从而将修正值加入定位装置14发送的定位信号当中,得到了定位装置14的真实位置,避免了误差传递。
34.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本发明宗旨的前提下还可以作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1