多回波信号的处理方法、装置、设备及存储介质与流程
本技术涉及激光雷达,尤其涉及一种多回波信号的处理方法、装置、设备及存储介质。
背景技术:
1、激光雷达是一种目标探测技术。使用激光作为信号光源,通过向目标对象发射激光束,从而采集目标对象的反射信号,以此获得目标对象的方位、速度等信息。激光雷达具有测量精度高、抗干扰能力强等优点,广泛应用于遥感、测量、智能驾驶、机器人等领域。
2、在激光雷达测距技术中,当发射出去的激光束的一部分遇到被测物体时会被反射,使激光雷达接收到一次回波光束,而其余部分会继续向前,遇见其他被测物体后再被反射,使得激光雷达再接收一次回波光束。相当于某一发射周期发射出的一个出射激光束可能会被两次或更多次反射,使得激光雷达在相应的接收周期内收到多个回波光束。如此,仅根据其中一个回波光束不一定会得到真实的测距信息,导致激光雷达测距的不准确。
技术实现思路
1、本技术提供一种多回波信号的处理方法、装置、设备及存储介质,以对多个回波进行提取,实现提高激光雷达测距的准确度。
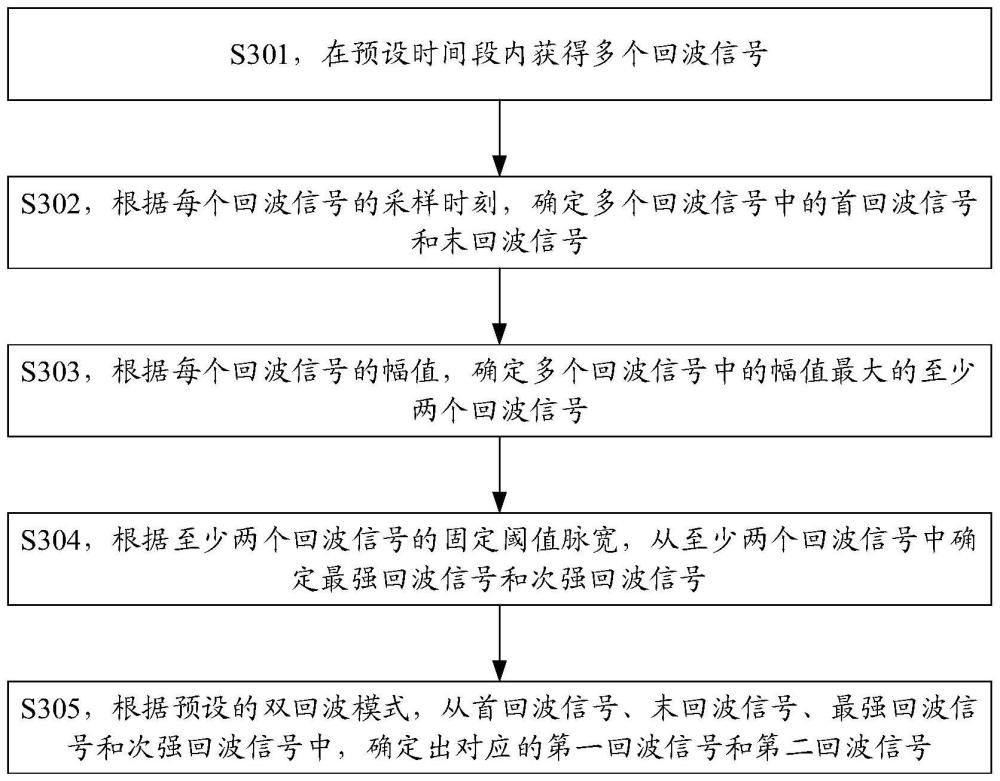
2、在第一方面,本技术提供了一种多回波信号的处理方法,包括:在预设时间段内获得多个回波信号;根据每个回波信号的采样时刻,确定多个回波信号中的首回波信号和末回波信号;根据每个回波信号的幅值,确定多个回波信号中的幅值最大的至少两个回波信号;根据至少两个回波信号的固定阈值脉宽,从至少两个回波信号中确定最强回波信号和次强回波信号;根据预设的双回波模式,从首回波信号、末回波信号、最强回波信号和次强回波信号中,确定出对应的第一回波信号和第二回波信号,第一回波信号和所述第二回波信号用于目标被测物体测距。
3、在一些可能的实施方式中,确定出对应的第一回波信号和第二回波信号,包括:当预设的双回波模式为第一模式时,确定出最强回波信号为第一回波信号,末回波信号为第二回波信号;当预设的双回波模式为第二模式时,确定出最强回波信号为第一回波信号,次强回波信号为第二回波信号。
4、在一些可能的实施方式中,在确定出对应的第一回波信号和第二回波信号之后,方法还包括:对第一回波信号进行处理,得到第一测距值和/或第一脉宽值;对第二回波信号进行处理,得到第二测距值和/或第二脉宽值;使用第一测距值、第一脉宽值、第二测距值、第二脉宽值中的至少一个数值,对目标被测物体的测距结果进行补偿。
5、在一些可能的实施方式中,在确定出对应的第一回波信号和第二回波信号之后,方法还包括:针对于所述第一回波信号和所述第二回波信号中的一个回波信号,对所述回波信号进行处理,得到第三脉宽值;将第三脉宽值与预设阈值进行比较,在第三脉宽值小于预设阈值的情况下,基于与回波信号的波形的重心位置对应的第一时间来确定激光束飞行时间,并且,在第三脉宽值大于预设阈值的情况下,基于与回波信号的预定前沿位置对应的第二时间来确定激光束飞行时间,并且,在述第三脉宽值等于预设阈值的情况下,基于第一时间或者所述第二时间来确定激光束飞行时间;根据飞行时间,确定激光雷达与目标被测物体之间的距离。
6、在一些可能的实施方式中,预设阈值包括以下项中的任一个:代表回波信号的在饱和状态和非饱和状态之间的临界状态的脉冲宽度的第一值;代表当回波信号的下降沿开始出现畸变时的脉冲宽度的第二值,该第二值大于第一值;以及大于第一值且小于第二值的第三值。
7、在第二方面,本技术提供了一种激光雷达的测距方法。该方法包括:发射激光束;接收激光束经由目标被测物体反射的回波光束;确定当前工作模式对应的回波模式为单回波模式或双回波模式;在双回波模式下,获取回波光束对应的多个回波信号,根据如第一方面的多回波信号的处理方法,获取目标被测物体的测距结果;在单回波模式下,获取回波光束对应的一个第三回波信号,根据第三回波信号获取目标被测物体的测距结果。
8、在第三方面,本技术提供了一种多回波信号的处理装置。该处理装置包括:接收模块,用于在预设时间段内获得多个回波信号。处理模块,用于根据每个回波信号的采样时刻,确定多个回波信号中的首回波信号和末回波信号;用于根据每个回波信号的幅值,确定多个回波信号中的幅值最大的至少两个回波信号;用于根据至少两个回波信号的固定阈值脉宽,从至少两个回波信号中确定最强回波信号和次强回波信号;用于根据预设的双回波模式,从首回波信号、末回波信号、最强回波信号和次强回波信号中,确定出对应的第一回波信号和第二回波信号,第一回波信号和第二回波信号用于目标被测物体测距。
9、在一些可能的实施方式中,处理模块,还用于当预设的双回波模式为第一模式时,确定出最强回波信号为第一回波信号,末回波信号为第二回波信号;当预设的双回波模式为第二模式时,确定出最强回波信号为第一回波信号,次强回波信号为第二回波信号。
10、在一些可能的实施方式中,装置还包括:计算模块,用于对第一回波信号进行处理,得到第一测距值和/或第一脉宽值;用于对第二回波信号进行处理,得到第二测距值和/或第二脉宽值;用于使用第一测距值、第一脉宽值、第二测距值、第二脉宽值中的至少一个数值,对目标被测物体的测距结果进行补偿。
11、在一些可能的实施方式中,装置还包括:计算模块,用于针对于所述第一回波信号和所述第二回波信号中的一个回波信号,对所述回波信号进行处理,得到第三脉宽值;将第三脉宽值与预设阈值进行比较,在第三脉宽值小于预设阈值的情况下,基于与回波信号的波峰的重心位置对应的第一时间来确定激光束飞行时间,并且,在第三脉宽值大于预设阈值的情况下,基于与回波信号的预定前沿位置对应的第二时间来确定激光束飞行时间,并且,在第三脉宽值等于预设阈值的情况下,基于第一时间或者第二时间来确定激光束飞行时间;根据飞行时间,确定激光雷达与目标被测物体之间的距离。
12、在一些可能的实施方式中,预设阈值包括以下项中的任一个:代表回波信号的在饱和状态和非饱和状态之间的临界状态的脉冲宽度的第一值;代表当回波信号的下降沿开始出现畸变时的脉冲宽度的第二值,第二值大于第一值;以及大于第一值且小于第二值的第三值。
13、在第四方面,本技术提供了一种激光雷达的测距装置。该测距装置包括:发射模块,用于发射激光束;回波接收模块,用于接收激光束经由目标被测物体反射的回波光束;确定模块,用于确定当前工作模式对应的回波模式为单回波模式或双回波模式;测距处理模块,用于在双回波模式下,获取回波光束对应的多个回波信号,根据如第一方面的多回波信号的处理方法,获取目标被测物体的测距结果;以及,用于在单回波模式下,获取回波光束对应的一个第三回波信号,根据第三回波信号获取目标被测物体的测距结果。
14、在第五方面,本技术提供了一种激光雷达,包括:用于存储处理器可执行指令的存储器;处理器;其中,处理器被配置为:用于执行可执行指令时,实现如第一方面、第二方面及其可能的实施方式的方法。
15、在第六方面,本技术提供一种计算机存储介质,计算机存储介质存储有计算机可执行指令,计算机可执行指令被处理器执行后,能够实现如第一方面、第二方面及其可能的实施方式的方法。
16、本技术提供的技术方案可以包括以下有益效果:
17、在本技术中,激光雷达可以获取预设时间段内接收到的一束激光束的多个回波信号,并对该多个回波信号进行处理,处理过程中加入采样时间信息和回波固定阈值脉宽为判断依据,最终获得多个回波信号中的首回波信号、末回波信号、最强回波信号和次强回波信号的信息,提高回波检测的正确性和鲁棒性。另外,多回波信号检测后加入了回波类型标志位,可实现在激光雷达输出的信息中查看回波类型,为后续的测距数据生成过程提供更加准确和多样化的初始数据,为点云层感知算法提供更多的有效信息,从而有效提高激光雷达测距的性能。
18、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!