一种无人机配电线路的故障智能研判方法与流程
1.本发明属于配电线路巡检技术领域,涉及一种无人机配电线路的故障智能研判方法。
背景技术:
2.配网杆塔长期处于露天环境,难免会遇到一些故障信息的发生,情节严重,会导致断电,造成严重的经济损失,同时给居民生活带来不便。为保障线路的正常运行,需要及时发现故障,及时排查问题并解决问题,因此在配网无人机系统开发故障研判模块,对接配电自动化系统,从配电自动化系统获取故障信息,并根据故障信息提示,精准判断故障位置,进行及时的故障研判与解决,保障线路稳定,安全运行。在故障研判过程中,目前电力公司主要依靠人工利用望远镜或者爬塔去定位判断故障,因为距离塔头位置较远,查看不够全面,经常定位时间比较长。
技术实现要素:
3.本发明的目的在于提供一种无人机配电线路的故障智能研判方法,通过配网无人机系统与无人机作业端的结合,实现对电网线路故障信息的闭环检测与修复,快速发现故障并进行故障研判,保障线路的安全稳定运行。
4.本发明通过下述技术方案来实现。一种无人机配电线路的故障智能研判方法,步骤如下:s1.故障信息获取:配网无人机系统与配电自动化系统进行接口对接,通过接口实时获取配电线路的故障信息;s2.故障定位:配网无人机系统获取故障信息后,依据故障信息自动匹配配网无人机系统中的线路杆塔台账信息,自动定位故障发生位置;若配网无人机系统有故障信息所需对应的线路杆塔台账信息,则线路杆塔台账信息直接与故障信息匹配,获取故障信息位置的定位;若配网无人机系统无故障信息所对应的线路杆塔台账信息,则根据电力公司存量的线路巡检照片,自动构建线路杆塔台账信息;s3.前端故障识别:精确校验故障信息位置后,配网无人机系统实时获取故障任务信息,巡检人员根据定位的故障信息位置,到故障点附近进行现场故障排查,通过无人机作业端搭载前端智能识别装置,前端智能识别装置实时视频自动识别故障信息,并将故障信息回传至配网无人机系统;s4.故障修复及故障信息变更:配网无人机系统接收故障信息及实时视频,根据发现的故障信息,巡检人员进行故障修复,修复完成后,配网无人机系统进行故障信息的变更,将故障信息变更为已修复状态。
5.进一步优选,采集线路杆塔台账信息中的线路杆塔坐标数据,作业人员根据指定线路任务,无人机按航线飞行进行数据采集,沿着线路,在每基杆塔正上方,定点记录杆塔
坐标位置,并在杆塔周围一定距离范围内,同时执行rfid标签扫描任务,识别实物id标签,通过边缘计算模块提供的接口将rfid识别指令发送至前端智能识别装置进行工作,获取设备实物id编号;同时,对杆塔进行精细化拍照,得到精细化照片成果数据,利用边缘计算模块中的柱上设备识别模型完成柱上设备的自动识别工作;根据采集的杆塔信息,将杆塔空间坐标数据与图像识别出的柱上设备信息、实物id编号建立唯一的关联关系,形成满足线路杆塔台账的标准数据,记录线路杆塔设备相关的数据信息,完成线路杆塔台账信息的构建。
6.进一步优选,前端智能识别装置实时视频自动识别故障信息的方法如下:s31、使用nanodetnet作为目标检测算法,对视频中每帧图像进行目标检测,得到待识别物体的预测框及其对应类别,第一帧图像只有检测框,没有建议框,第一帧图像中目标检测结果即为第一帧图像的最终目标框;s32、使用卡尔曼滤波,预测上一帧图像中每个目标在当前帧图像中的位置,作为上一帧图像对当前帧图像的建议框;s33、通过目标检测算法对当前帧图像中的物体进行目标检测,作为当前帧的检测框,与第一帧图像目标检测不同的是,设置检测框的分数,以保留最多的检测结果;s34、结合当前帧图像的建议框与检测框,确定当前帧图像最终目标框。
7.进一步优选,步骤s32的具体过程如下:使用八个参数对目标框状态进行描述,目标框中心横坐标x、目标框中心纵坐标y、目标框宽w、目标框高h、目标框中心横坐标变化速度vx、目标框中心纵坐标变化速度vy、目标框宽变化速度vw、目标框高变化速度vh。
8.k时刻目标框状态表示为tk,k时刻状态协方差表示为pk:变换矩阵表示为fk,初始为下式的值:则对k时刻目标框状态,可由k-1时刻目标框状态变换而来:
t
k-1
表示k-1时刻目标框状态,p
k-1
表示k-1时刻状态协方差;通过卡尔曼滤波预测上一帧图像中的目标框在当前帧图像中的位置,作为当前帧图像中目标的建议框。
9.进一步优选,步骤s34的具体过程如下:s341.建议框与检测框匹配:计算同类别的建议框与检测框重叠度,重叠度使用交并比iou作为衡量标准,当iou》0.5,则认为建议框与检测框匹配,视为同一目标,对于未匹配成功的检测框,视为当前帧图像新出现的目标,对于未匹配成功的建议框,视为当前帧图像已经不存在该目标,直接删除;s342.更新检测框的分数:重新计算匹配成功的检测框的分数,新的检测框的分数为建议框与检测框的平均值;未匹配成功的检测框的分数不变;s343.检测框去重:对更新分数后的检测框,使用分数阈值进行筛选;最后进行非最大值抑制,去除重合度较高的检测框;s344.卡尔曼滤波更新:对于匹配成功的检测框,将检测框作为目标在当前帧图像的位置,更新匹配建议框对应的卡尔曼滤波矩阵,用更新后的卡尔曼滤波矩阵预测检测框对应的目标在下一帧图像中的位置;对于未匹配成功的检测框,新建一个卡尔曼滤波矩阵,用于预测未匹配成功的检测框对应的目标在下一帧图像中的位置。
10.进一步优选,构建线路杆塔台账信息时,计算杆塔坐标的方法如下:提取线路巡检照片中的经纬度信息,并根据通用墨卡托投影算法转换为utm坐标作为多边形顶点,以多边形的一个顶点o为原点,作连接o与其他所有非相邻顶点的线段,将n条边的多边形分为n-2个三角形;求每个三角形的面积和重心:设第i个三角形的重心坐标为g(c
xi
,c
yi
),顶点坐标按逆时针排序分别为a1(x1,y1),a2(x2,y2),a3(x3,y3),则有c
xi
= (x1+ x2+ x3) / 3 ; c
yi = (y1+ y2+ y3) / 3 ;第i个三角形的面积为s
i = ( (x2–
x1) * (y3–
y1)
ꢀ‑ꢀ
(x3–
x1) * (y2–
y1) ) / 2 ;求多边形的重心c
xcx
= (∑c
xi
* si) / ∑s
i ; cy= (∑c
yi
*si) / ∑si; c
xi
是第i个三角形的横坐标,c
yi
是第i个三角形的纵坐标;将c
x
,cy根据通用墨卡托投影算法转换为经纬度,这个经纬度即为拍摄中心,也是杆塔坐标。
11.本发明通过配网无人机系统对接配电自动化系统的故障信息,自动定位故障所在附近杆塔位置,因为电力公司有很多存量数据并没有杆塔坐标台账,本发明通过杆塔附近拍摄的巡检照片坐标自动拟合计算获取杆塔坐标,基于杆塔坐标,无人机作业端通过搭载前端智能识别装置,对在故障附近拍摄的视频进行实时识别,识别故障类型并快速定位故障位置,反馈给运维人员及时进行故障修复。通过无人机以及前端智能识别装置的应用,可有效降低排查故障的难度,尤其对于故障位于杆塔上方的情况,减少人工爬塔的次数,提升故障发现效率,降低故障造成的停电时长,提高用户用电满意度。
附图说明
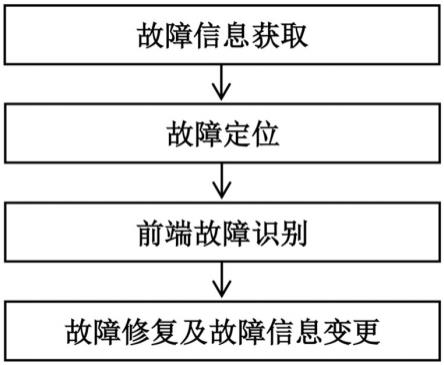
12.图1为本发明所述无人机配电线路的故障智能研判方法的流程图。
13.图2为前端智能识别装置实时视频自动识别故障信息的流程图。
具体实施方式
14.下面结合附图对本发明的技术构思进一步详细阐明。
15.参照图1,一种无人机配电线路的故障智能研判方法,步骤如下:s1.故障信息获取:配网无人机系统与配电自动化系统进行接口对接,通过接口实时获取配电线路的故障信息。
16.s2.故障定位:配网无人机系统获取故障信息后,依据故障信息自动匹配配网无人机系统中的线路杆塔台账信息,自动定位故障发生位置。
17.若配网无人机系统有故障信息所需对应的线路杆塔台账信息,则线路杆塔台账信息直接与故障信息匹配,获取故障信息位置的定位。
18.若配网无人机系统无故障信息所对应的线路杆塔台账信息,则根据电力公司存量的线路巡检照片,自动构建线路杆塔台账信息。构建线路杆塔台账信息时,计算杆塔坐标的方法如下:(1)提取线路巡检照片中的经纬度信息,并根据通用墨卡托投影算法转换为utm坐标作为多边形顶点,以多边形的一个顶点o为原点(可以选输入的第一个点作为原点),作连接o与其他所有非相邻顶点的线段,将多边形(n条边)分为n-2个三角形。
19.(2)求每个三角形的面积和重心:设第i个三角形的重心坐标为g(c
xi
,c
yi
),顶点坐标按逆时针排序分别为a1(x1,y1),a2(x2,y2),a3(x3,y3),则有c
xi
= (x1+ x2+ x3) / 3 ; c
yi = (y1+ y2+ y3) / 3 ;第i个三角形的面积为s
i = ( (x2–
x1) * (y3–
y1)
ꢀ‑ꢀ
(x3–
x1) * (y2–
y1) ) / 2 ;(3)求多边形的重心公式:c
x
= (∑c
xi
* si) / ∑s
i ; cy= (∑c
yi
*si) / ∑si; c
xi
是第i个三角形的横坐标,c
yi
是第i个三角形的纵坐标。将c
x
,cy根据通用墨卡托投影算法转换为经纬度,此值即为拍摄中心,即为杆塔坐标。
20.s3.前端故障识别:精确校验故障信息位置后,配网无人机系统实时获取故障任务信息,巡检人员根据定位的故障信息位置,到故障点附近进行现场故障排查,通过无人机作业端搭载前端智能识别装置,前端智能识别装置实时视频自动识别故障信息,如发现刀闸破损、断开,跌落式保险破损、断开等故障时,可实时识别故障信息,并将故障信息回传至配网无人机系统。
21.s4.故障修复及故障信息变更:配网无人机系统接收故障信息及实时视频,根据发现的故障信息,巡检人员进行故障修复,修复完成后,配网无人机系统进行故障信息的变更,将故障信息变更为已修复状态。配网无人机系统与无人机作业端的结合,实现对电网线路故障信息的闭环检测与修复,快速发现故障并进行故障研判,保障线路的安全稳定运行。
22.本实施例中,线路杆塔台账信息是故障智能研判的基础,基于无人机以及挂载rfid标签与边缘计算模块进行快速台账构建,一次飞行采集完成线路杆塔坐标采集、实物
id标签扫描以及前端柱上关键设备采集,并将线路杆塔与实物id编号和柱上设备信息进行关联绑定,形成杆塔属性信息。
23.采集线路杆塔台账信息中的线路杆塔坐标数据,作业人员根据指定线路任务,按航线飞行进行数据采集,沿着线路,在每基杆塔正上方,定点记录杆塔坐标位置,并在杆塔周围一定距离范围内,同时执行rfid标签扫描任务,识别实物id标签,通过边缘计算模块提供的接口将rfid识别指令发送至前端智能识别装置进行工作,获取设备实物id编号。同时,还需要对杆塔进行精细化拍照,得到精细化照片成果数据,利用边缘计算模块中的柱上设备识别模型完成柱上设备的自动识别工作。根据采集的杆塔信息,将杆塔空间坐标数据与图像识别出的柱上设备信息、实物id编号建立唯一的关联关系,形成满足线路杆塔台账的标准数据,记录线路杆塔设备相关的数据信息,完成线路杆塔台账信息的构建。
24.在进行视频检测时,由于目标检测结果的不稳定性,由于角度、距离、光照等的影响,造成帧与帧之间检测结果不连续,目标检测算法的检测结果会存在个别漏检现象。这种情况在视频检测时,经前后两帧的对比后,更为明显。本发明提出通过卡尔曼滤波,预测前一帧中的目标位置在当前帧中的位置,将前一帧的结果引入到当前帧中,然后与当前帧的目标检测结果结合,有效降低这种前一帧中目标在当前帧中漏检的现象。通过对各相连帧的检测结果进行融合,可以提高检测结果的稳定性。本实施例中,参照图2,前端智能识别装置实时视频自动识别故障信息的方法如下:s31、使用nanodetnet作为目标检测算法,对视频中每帧图像进行目标检测,得到待识别物体的预测框及其对应类别,第一帧图像只有检测框,没有建议框,第一帧图像中目标检测结果即为第一帧图像的最终目标框;s32、使用卡尔曼滤波,预测上一帧图像中每个目标在当前帧图像中的位置,作为上一帧图像对当前帧图像的建议框。
25.使用八个参数对目标框状态进行描述,目标框中心横坐标x、目标框中心纵坐标y、目标框宽w、目标框高h、目标框中心横坐标变化速度vx、目标框中心纵坐标变化速度vy、目标框宽变化速度vw、目标框高变化速度vh。
26.k时刻目标框状态表示为tk,k时刻状态协方差表示为pk:变换矩阵表示为fk,初始为下式的值:则对k时刻目标框状态,可由k-1时刻目标框状态变换而来:
t
k-1
表示k-1时刻目标框状态,p
k-1
表示k-1时刻状态协方差;通过卡尔曼滤波预测上一帧图像中的目标框在当前帧图像中的位置,作为当前帧图像中目标的建议框。
27.s33、通过目标检测算法对当前帧图像中的物体进行目标检测,作为当前帧的检测框,与第一帧图像目标检测不同的是,设置检测框的分数》0.2,以保留最多的检测结果。
28.s34、结合当前帧图像的建议框与检测框,确定当前帧图像最终目标框。
29.s341.建议框与检测框匹配:计算同类别的建议框与检测框重叠度,重叠度使用交并比iou作为衡量标准,当iou》0.5,则认为建议框与检测框匹配,视为同一目标,对于未匹配成功的检测框,视为当前帧图像新出现的目标,对于未匹配成功的建议框,视为当前帧图像已经不存在该目标,直接删除。
30.s342.更新检测框的分数:重新计算匹配成功的检测框的分数,新的检测框的分数(score)为建议框与检测框的平均值。未匹配成功的检测框的分数不变。
31.s343.检测框去重:对更新分数后的检测框,使用分数》0.6进行筛选,去除分数较低的检测框,最后进行非最大值抑制,去除重合度较高的检测框。
32.s344.卡尔曼滤波更新:对于匹配成功的检测框,将检测框作为目标在当前帧图像的位置,更新匹配建议框对应的卡尔曼滤波矩阵,用更新后的卡尔曼滤波矩阵预测检测框对应的目标在下一帧图像中的位置;对于未匹配成功的检测框,新建一个卡尔曼滤波矩阵,用于预测未匹配成功的检测框对应的目标在下一帧图像中的位置。
33.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1