基于变积分长度的动基座初始对准方法、系统、设备及介质
1.本发明涉惯性导航系统初始对准领域,属于一种基于变积分长度的动基座初始对准方法、系统、设备及介质。
背景技术:
2.在动基座对准领域,采用卫星导航系统辅助惯性导航系统进行动基座对准是较为常用的方法。通过方向余弦矩阵链式法则,可以将对准问题转化成矢量观测器姿态估计问题。矢量观测器的构造采用传感器输出进行迭代计算,但由于对准误差与传感器零偏在导航系的映射有关,因此当载体机动运动时,其对准误差会随着机动变化呈现波动特性。
3.为克服传统方法对准误差受载体机动运动变化的问题,提出一种新的动基座初始对准方法具有重要意义。
技术实现要素:
4.本发明的目的在于提供一种基于变积分长度的动基座初始对准方法、系统、设备及介质,弱化了载体机动运动对对准误差的影响,实现了动态对准过程的优化,提高了对准精度。
5.实现本发明目的的技术方案为:
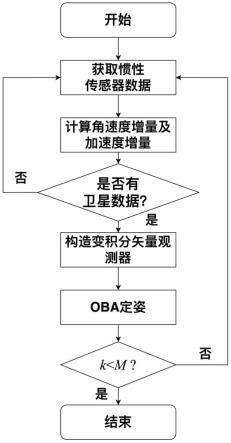
6.一种基于变积分长度的动基座对准方法,包括以下几个步骤:
7.步骤1:获取惯性传感器数据及卫星导航接收机数据;
8.步骤2:构造变积分长度矢量观测器模型;
9.步骤3:设计oba姿态估计算法,实现实时姿态估计;
10.步骤4:若当前对准时间k=m,则输出对准结果,完成对准过程,m为设定的对准过程持续时间,若k《m,表示对准过程未完成,则重复上述步骤一至步骤四,直至对准结束。
11.一种初速度扰动消除极区动基座对准系统,包括数据获取单元、观测器模型构建单元、离散化单元、姿态估计单元和校准单元;其中:
12.数据获取单元用于获取惯性传感器数据及卫星导航接收机数据;
13.观测器模型构建单元用于构造变积分长度矢量观测器模型;
14.离散化单元用于对观测器模型离散化得到离散化参考矢量和离散化观测矢量;
15.姿态估计单元通过oba姿态矩阵进行姿态估计;
16.校准单元通过姿态估计值进行校准。
17.一种初速度扰动消除极区动基座对准设备,包括:存储器、处理器和存储在所述存储器上的计算机程序,所述处理器执行所述计算机程序时实现所述的初速度扰动消除极区动基座对准方法。
18.一种计算机存储介质,所述计算机存储介质存储有可执行程序,所述可执行程序被处理器执行实现所述的初速度扰动消除极区动基座对准方法的步骤。
19.本发明的优点在于:
20.(1)本发明采用卫星导航信息进行矢量观测器构造,具有对准精度高的优点;
21.(2)本发明采用变积分长度方法进行矢量优化,减小了由于载体机动运动造成的对准误差波动,提高了对准精度。
附图说明
22.图1为本发明对准过程流程图。
23.图2为变积分长度图。
24.图3为纵摇角误差图。
25.图4为横摇角误差图。
26.图5为航向角误差图。
具体实施方式
27.下面结合附图和实施举例对本发明作进一步的详细说明:
28.本发明提出一种基于变积分长度的动基座初始对准方法,在对矢量观测器进行计算的同时,采用变积分长度方法减小过往矢量对对准结果的影响,实现对准过程的优化;如图1所示,具体包括以下几个步骤:
29.步骤1:获取惯性传感器数据及卫星导航接收机数据;
30.在进行动基座对准时,需要采集传感器数据。考虑到惯性传感器与卫星接收机数据输出不一致问题,先采集惯性传感器数据:
[0031][0032]
式中,fb表示真实比力;ba表示加速度计零偏;ηa表示加速度计随机噪声;表示加速度计测量比力;表示真实角速度;bg表示陀螺仪零偏;ηg表示陀螺仪随机噪声;表示陀螺仪测量角速度;其中,陀螺仪量测常值漂移误差为bg=[0.02 0.02 0.02]
t
°
/h,陀螺仪量测随机游走误差为输出频率为200hz;加速度计量测常值漂移误差为ba=[500 500 500]
t
μg,加速度计量测随机游走误差为输出频率为200hz;卫星导航系统采样周期为1s。
[0033]
在卫星数据未获取到时,利用惯性传感器数据进行加速度增量和角速度增量计算:
[0034][0035]
8δθ1×
δv2+2δv1×
δθi+2δθ2xδv2)
[0036][0037]
式中,表示位置增量;表示速度增量;δv1表示比力子样1;δv2表示比力子样2;δθ1表示旋转子样1;δθ2表示旋转子样2;δv1、δv2、δθ1、δθ2分别为2个惯性
传感器数据的积分,其积分公式为本领域公知,在此不再累述
[0038]
当卫星数据有效时,可以获取卫星定位信息:
[0039][0040]
式中,表示卫星输出位置信息;pn表示真实位置信息;δpn表示位置误差;表示卫星输出速度信息;vn表示真实速度信息;δvn表示速度误差;
[0041]
步骤2:构造变积分长度矢量观测器模型;
[0042]
在获取到惯性传感器及卫星导航数据之后,结合图2所示的变积分长度对准示意图,再进行可以构造如下矢量观测器:
[0043][0044]
式中,fb表示加速度计测量比力;表示σ时刻载体系相对初始载体系的方向余弦矩阵;表示参考矢量;表示距离微分;表示观测矢量,表示τ时刻导航系相对于初始导航系的方向余弦矩阵;表示地球自转角速度在导航系的映射;vn表示导航系速度;s表示窗口内矢量个数;δtg表示卫星导航接收机数据采样周期;vn(tm)表示tm时刻导航系速度;gn表示地球重力;tm表示积分过程起始时间;tm表示积分过程终止时间;
[0045]
对上式进行离散化,可得参考矢量如下式:
[0046][0047]
式中,表示离散化参考矢量;表示速度增量;表示位置增量;δtg表示卫星导航接收机数据采样周期;表示ts时刻载体系相对初始载体系的方向余弦矩阵;表示tk时刻载体系相对初始载体系的方向余弦矩阵;
[0048]
同理,离散化观测矢量可以表示为:
[0049]
[0050]
式中,表示离散化观测矢量;rn(tm)表示tm时刻运动距离;rn(tm)表示tm时刻运动距离;表示tm时刻导航系相对于初始导航系的方向余弦矩阵;表示tm时刻导航系相对于初始导航系的方向余弦矩阵;s表示窗口内矢量个数;vn(tm)表示tm时刻导航系速度;δtg表示卫星导航接收机数据采样周期;表示ts时刻导航系相对于初始导航系的方向余弦矩阵;表示导航系相对于惯性系旋转角速度在导航系的映射;表示地球自转角速度在导航系的映射;rn(t
s+1
)表示t
s+1
时刻运动距离;gn表示地球重力;表示ts时刻导航系相对于初始导航系的方向余弦矩阵;表示tk时刻导航系相对于初始导航系的方向余弦矩阵;
[0051]
通过图2的变积分长度对准示意图中可以看出,本方法是在选定积分区间内进行对准,消除了累积误差。
[0052]
步骤3:设计oba姿态估计算法,实现实时姿态估计;
[0053]
利用上述构造的矢量,可以构造如下oba姿态矩阵:
[0054][0055]
式中,km表示m时刻oba姿态矩阵;k
m-1
表示m-1时刻oba姿态矩阵;表示离散化参考矢量;表示离散化观测矢量;
[0056]
式中矩阵运算可以表示为:
[0057][0058]
式中,表示离散化参考矢量;表示离散化观测矢量;
[0059]
一种初速度扰动消除极区动基座对准系统,包括数据获取单元、观测器模型构建单元、离散化单元、姿态估计单元和校准单元;其中:
[0060]
数据获取单元用于获取惯性传感器数据及卫星导航接收机数据;
[0061]
观测器模型构建单元用于构造变积分长度矢量观测器模型;
[0062]
离散化单元用于对观测器模型离散化得到离散化参考矢量和离散化观测矢量;
[0063]
姿态估计单元通过oba姿态矩阵进行姿态估计;
[0064]
校准单元通过姿态估计值进行校准。
[0065]
所述系统包含基于变积分长度的动基座初始对准方法的技术特征,在此不再累述。
[0066]
基于所述方法进行验证,图3~图5是本发明和传统方法纵摇角、横摇角和航向角的对准结果图,从图中可以看出本方法可以有效抑制误差波动现象,提高了对准精度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1