传感器的制作方法
1.本发明涉及在凸面上配置有传感器元件的传感器。
背景技术:
2.近年来,在各种用途中利用使用了磁阻效应元件的磁传感器。在包含磁传感器的系统中,有时想要利用设置于基板上的磁阻效应元件检测包含与基板的面垂直的方向的分量的磁场。在该情况下,通过设置将与基板的面垂直的方向的磁场转换成与基板的面平行的方向的磁场的软磁性体,或在形成于基板上的倾斜面上配置磁阻效应元件,能够检测包含与基板的面垂直的方向的分量的磁场。
3.在中国专利申请公开第101142494a号说明书中公开有在基板上设置有x轴传感器、y轴传感器以及z轴传感器的磁传感器。构成z轴传感器的磁阻效应元件设置于将厚膜局部切削而形成的v字状的槽的斜面中作为下半部分的平坦的斜面的第二斜面上。第二斜面比v字状的槽的斜面中作为上半部分的平坦的斜面的第一斜面陡峭。第一斜面的与第二斜面相反的一侧的端部与平坦的面即槽的顶部连接。
4.如中国专利申请公开第101142494a号说明书中公开的磁传感器那样,在形成磁阻效应元件的凸面具有多个平坦的面的情况下,当使用光刻对形成于槽部的斜面的磁阻效应元件或电极进行图形化时,由于两个面相交而形成的多个角部而产生光晕,其结果,有时光致抗蚀剂掩模的形状会变形。因此,优选凸面以不形成角部的方式整体弯曲。
5.但是,从磁传感器的低高度化等观点出发,优选凸面的高度低。另外,从磁传感器的灵敏度的观点出发,为了设置更多的磁阻效应元件,优选凸面的宽度小。但是,以往很难在减小凸面的宽度的同时降低凸面的高度。
6.上述的问题不限于磁传感器,而是适用于在倾斜面上形成传感器元件的所有传感器。
技术实现要素:
7.本发明的目的在于提供一种传感器,在倾斜的凸面上形成有传感器元件的功能层,能够降低凸面的高度。
8.本发明的传感器是构成为检测规定的物理量的传感器。本发明的传感器包含具有上表面的基板、配置在基板之上的支承部件、以及构成为物性根据规定的物理量而变化的传感器元件。支承部件具有向远离基板的上表面的方向伸出并且至少一部分相对于基板的上表面倾斜的凸面。传感器元件包含构成传感器元件的至少一部分的功能层。功能层配置在凸面之上。凸面具有距基板的上表面最远的上端部,并且包括包含凸面的上端部且向远离基板的上表面的方向凸出的曲面部分。曲面部分包括包含凸面的上端部的第一部分、和在远离凸面的上端部的位置与第一部分连续的第二部分。在将与基板的上表面垂直的截面中的凸面的形状视为以与截面及基板的上表面各自平行的假想的直线上的位置为变量的函数z时,与第一部分对应的函数z的二阶导函数z”的值的绝对值的平均值小于与第二部分
对应的函数z的二阶导函数z”的值的绝对值的平均值。
9.在本发明的传感器中,支承部件具有凸面。凸面的曲面部分包括包含凸面的上端部的第一部分、和在远离凸面的上端部的位置与第一部分连续的第二部分。与第一部分对应的函数z的二阶导函数z”的值的绝对值的平均值小于与第二部分对应的函数z的二阶导函数z”的值的绝对值的平均值。由此,根据本发明,在倾斜的凸面上形成有传感器元件的功能层的传感器中,能够降低凸面的高度。
10.本发明的其它目的、特征及优点将通过以下的说明变得足够清楚。
附图说明
11.图1是表示本发明一实施方式的磁传感器的立体图。
12.图2是表示包含本发明一实施方式的磁传感器的磁传感器装置的结构的功能框图。
13.图3是表示本发明一实施方式的第一检测电路的电路结构的电路图。
14.图4是表示本发明一实施方式的第二检测电路的电路结构的电路图。
15.图5是表示本发明一实施方式的磁传感器的一部分的俯视图。
16.图6是表示本发明一实施方式的磁传感器的一部分的剖视图。
17.图7是表示本发明一实施方式的磁阻效应元件的侧视图。
18.图8是表示本发明一实施方式的磁传感器的制造方法的一工序的剖视图。
19.图9是表示接着图8所示的工序的工序的剖视图。
20.图10是表示接着图9所示的工序的工序的剖视图。
21.图11是表示接着图10所示的工序的工序的剖视图。
22.图12是用于说明本发明一实施方式的支承部件的形状的说明图。
23.图13是用于说明本发明一实施方式的凸面的形状的说明图。
24.图14是示出表示本发明一实施方式的凸面形状的函数的曲线图的说明图。
25.图15是表示图14所示函数的一阶导函数的曲线的说明图。
26.图16是表示图14所示函数的二阶导函数的图的说明图。
具体实施方式
27.以下说明的本发明的实施方式涉及构成为检测规定的物理量的传感器。在实施方式中,传感器具备构成为物性根据规定的物理量而变化的传感器元件。例如,规定的物理量也可以是作为检测对象的磁场的对象磁场的方向及强度的至少一方。该情况下,传感器元件也可以是构成为检测对象磁场的方向及强度的至少一方的变化的磁检测元件。具备磁检测元件的传感器也被称为磁传感器。磁传感器构成为检测对象磁场的方向及强度的至少一方。以下,以传感器为磁传感器的情况为例,对实施方式进行详细说明。
28.首先,参照图1及图2,对本发明一实施方式的磁传感器的结构进行说明。图1是表示本实施方式的磁传感器的立体图。图2是表示包含本实施方式的磁传感器的磁传感器装置的结构的功能框图。本实施方式的磁传感器1对应于本发明的“传感器”。
29.如图1所示,磁传感器1具有长方体形状的芯片的形态。磁传感器1具有位于相互相反侧的上表面1a及下表面、和将上表面1a及下表面连接的四个侧面。另外,磁传感器1具有
设置在上表面1a上的多个电极焊盘。
30.在此,参照图1对本实施方式的基准坐标系进行说明。基准坐标系是以磁传感器1为基准的坐标系,是由三个轴定义的正交坐标系。在基准坐标系中,定义了x方向、y方向、z方向。x方向、y方向、z方向相互正交。在本实施方式中,特别地,将与磁传感器1的上表面1a垂直的方向、且从磁传感器1的下表面朝向上表面1a的方向设为z方向。另外,将与x方向相反的方向设为-x方向,将与y方向相反的方向设为-y方向,将与z方向相反的方向设为-z方向。定义基准坐标系的三个轴是平行于x方向的轴、平行于y方向的轴、以及平行于z方向的轴。
31.以下,将相对于基准位置处于z方向的前方的位置称为“上方”,将相对于基准位置处于与“上方”相反的一侧的位置称为“下方”。另外,关于磁传感器装置1的构成要素,将位于z方向的一端的面称为“上表面”,将位于-z方向的一端的面称为“下表面”。另外,“从z方向观察时”这样的表达是指从离开z方向的位置观察对象物。
32.如图2所示,磁传感器1具备第一检测电路20和第二检测电路30。第一及第二检测电路20、30各自包含多个磁检测元件,且构成为检测对象磁场而生成至少一个检测信号。在本实施方式中,特别地,多个磁检测元件是多个磁阻效应元件。以下,将磁阻效应元件记为mr元件。
33.第一及第二检测电路20、30生成的多个检测信号由处理器40处理。磁传感器1和处理器40构成磁传感器装置100。处理器40构成为通过处理第一及第二检测电路20、30生成的多个检测信号来生成第一检测值及第二检测值,该第一检测值及第二检测值与规定的基准位置处的磁场的互不相同的两个方向的分量具有对应关系。在本实施方式中,特别地,上述互不相同的两个方向是平行于xy平面的一个方向和平行于z方向的方向。处理器40例如由面向特定用途的集成电路(asic)构成。
34.处理器40例如也可以包含在支承磁传感器1的支承体中。该支承体具有多个电极焊盘。第一及第二检测电路20、30和处理器40例如经由磁传感器1的多个电极焊盘、支承体的多个电极焊盘及多个接合线连接。在磁传感器1的多个电极焊盘设置于磁传感器1的上表面1a的情况下,磁传感器1也可以以磁传感器1的下表面与支承体的上表面对置的姿势安装在支承体的上表面上。
35.接着,参照图3~图6,对第一及第二检测电路20、30进行说明。图3是表示第一检测电路20的电路结构的电路图。图4是表示第二检测电路30的电路结构的电路图。图5是表示磁传感器1的一部分的俯视图。图6是表示磁传感器1的一部分的剖视图。
36.在此,如图5所示,如下定义u方向和v方向。u方向是从x方向朝向-y方向旋转的方向。v方向是从y方向朝向x方向旋转的方向。在本实施方式中,特别地,将u方向设为从x方向朝向-y方向旋转了α的方向,将v方向设为从y方向朝向x方向旋转了α的方向。此外,α是大于0
°
且小于90
°
的角度。在一个例子中,α为45
°
。另外,将与u方向相反的方向设为-u方向,将与v方向相反的方向设为-v方向。
37.另外,如图6所示,如下定义w1方向和w2方向。w1方向是从v方向朝向-z方向旋转的方向。w2方向是从v方向朝向z方向旋转的方向。在本实施方式中,特别地,将w1方向设为从v方向朝向-z方向旋转了β的方向,将w2方向设为从v方向朝向z方向旋转了β的方向。此外,β是大于0
°
且小于90
°
的角度。另外,将与w1方向相反的方向设为-w1方向,将与w2方向
相反的方向设为-w2方向。w1方向和w2方向分别与u方向正交。
38.第一检测电路20构成为检测对象磁场的与w1方向平行的方向的分量,且生成与该分量具有对应关系的至少一个第一检测信号。第二检测电路30构成为检测对象磁场的与w2方向平行的方向的分量,生成与该分量具有对应关系的至少一个第二检测信号。
39.如图3所示,第一检测电路20包含电源端v2、接地端g2、信号输出端e21、e22、第一电阻部r21、第二电阻部r22、第三电阻部r23、以及第四电阻部r24。第一检测电路20的多个mr元件构成第一~第四电阻部r21、r22、r23、r24。
40.第一电阻部r21设置于电源端v2和信号输出端e21之间。第二电阻部r22设置于信号输出端e21和接地端g2之间。第三电阻部r23设置于信号输出端e22和接地端g2之间。第四电阻部r24设置于电源端v2和信号输出端e22之间。
41.如图4所示,第二检测电路30包含电源端v3、接地端g3、信号输出端e31、e32、第一电阻部r31、第二电阻部r32、第三电阻部r33、以及第四电阻部r34。第二检测电路30的多个mr元件构成第一~第4电阻部r31、r32、r33、r34。
42.第一电阻部r31设置于电源端v3和信号输出端e31之间。第二电阻部r32设置于信号输出端e31和接地端g3之间。第三电阻部r33设置于信号输出端e32和接地端g3之间。第四电阻部r34设置于电源端v3和信号输出端e32之间。
43.对电源端v2、v3各自施加规定大小的电压或电流。接地端g2、g3各自接地。
44.以下,将第一检测电路20的多个mr元件称为多个第一mr元件50b,将第二检测电路30的多个mr元件称为多个第二mr元件50c。因为第一及第二检测电路20、30是磁传感器1的构成要素,所以也可以说磁传感器1包含多个第一mr元件50b及多个第二mr元件50c。另外,对任意的mr元件标注符号50来表示。
45.图7是表示mr元件50的侧视图。mr元件50是自旋阀型的mr元件。mr元件50具有:具有方向被固定的磁化的磁化固定层52、具有方向能够根据对象磁场的方向而变化的磁化的自由层54、以及配置于磁化固定层52和自由层54之间的间隙层53。mr元件50可以是tmr(隧道磁阻效应)元件,也可以是gmr(巨磁阻效应)元件。在tmr元件中,间隙层53是隧道势垒层。在gmr元件中,间隙层53是非磁性导电层。在mr元件50中,电阻值根据自由层54的磁化的方向相对于磁化固定层52的磁化的方向所成的角度而变化,该角度为0
°
时电阻值成为最小值,在角度为180
°
时电阻值成为最大值。在各mr元件50中,自由层54具有易磁化轴方向成为与磁化固定层52的磁化的方向正交的方向的形状各向异性。此外,作为对自由层54设定规定方向的易磁化轴的单元,也可以使用对自由层54施加偏置磁场的磁体。
46.mr元件50还具有反铁磁性层51。反铁磁性层51、磁化固定层52、间隙层53及自由层54被依次层叠。反铁磁性层51由反铁磁性材料构成,在与磁化固定层52之间产生交换耦合,固定磁化固定层52的磁化的方向。此外,磁化固定层52也可以是所谓的自钉扎型的固定层(synthetic ferri pinned层,sfp层)。自钉扎型的固定层具有层叠了铁磁性层、非磁性中间层及铁磁性层的层叠铁氧体结构(ferri-structure),使两个铁磁性层反铁磁性地结合而成。在磁化固定层52为自钉扎型的固定层的情况下,也可以省略反铁磁性层51。
47.此外,mr元件50中的层51~54的配置也可以与图7所示的配置上下相反。
48.在图3及图4中,实心箭头表示mr元件50的磁化固定层52的磁化的方向。另外,空心箭头表示未对mr元件50施加对象磁场的情况下的mr元件50的自由层54的磁化的方向。
49.在图3所示的例子中,第一及第三电阻部r21、r23各自中的磁化固定层52的磁化的方向为w1方向。第二及第四电阻部r22、r24各自中的磁化固定层52的磁化的方向为-w1方向。另外,多个第一mr元件50b各自的自由层54具有易磁化轴方向成为与u方向平行的方向的形状各向异性。第一及第二电阻部r21、r22各自中的自由层54的磁化的方向在未对第一mr元件50b施加对象磁场的情况下为u方向。在上述情况下,第三及第四电阻部r23、r24各自的自由层54的磁化的方向为-u方向。
50.在图4所示的例子中,第一及第三电阻部r31、r33各自中的磁化固定层52的磁化的方向为w2方向。第二及第四电阻部r32、r34各自中的磁化固定层52的磁化的方向为-w2方向。另外,多个第二mr元件50c各自的自由层54具有易磁化轴方向为与u方向平行的方向的形状各向异性。第一及第二电阻部r31、r32各自的自由层54的磁化的方向在未对第二mr元件50c施加对象磁场的情况下为u方向。在上述情况下,第三及第四电阻部r33、r34各自的自由层54的磁化的方向为-u方向。
51.磁传感器1包含构成为向多个第一mr元件50b和多个第二mr元件50c各自的自由层54施加规定的方向的磁场的磁场发生器。在本实施方式中,磁场发生器包含对多个第一mr元件50b和多个第二mr元件50c各自的自由层54施加规定方向的磁场的线圈80。
52.此外,从mr元件50的制作精度等观点出发,磁化固定层52的磁化的方向和自由层54的易磁化轴的方向也可以稍微偏离上述方向。另外,磁化固定层52的磁化也可以构成为包含以上述方向为主分量的磁化分量。该情况下,磁化固定层52的磁化的方向为上述方向或大致上述方向。
53.以下,参照图5及图6对磁传感器1的具体的结构进行详细说明。图6表示图5中以6-6线表示的位置的截面的一部分。
54.磁传感器1包含具有上表面301a基板301、绝缘层302、303、304、305、306、307、308、309、310、多个下部电极61b、多个下部电极61c、多个上部电极62b、多个上部电极62c、多个下部线圈要素81、以及多个上部线圈要素82。基板301的上表面301a平行于xy平面。z方向也是与基板301的上表面301a垂直的一个方向。此外,线圈要素是线圈绕组的一部分。
55.绝缘层302配置在基板301之上。多个下部线圈要素81配置在绝缘层302之上。绝缘层303在绝缘层302之上配置于多个下部线圈要素81的周围。绝缘层304、305、306依次层叠在多个下部线圈要素81和绝缘层303之上。
56.多个下部电极61b和多个下部电极61c配置在绝缘层306之上。绝缘层307在绝缘层306之上配置于多个下部电极61b的周围和多个下部电极61c的周围。多个第一mr元件50b配置在多个下部电极61b之上。多个第二mr元件50c配置在多个下部电极61c之上。绝缘层308在多个下部电极61b、多个下部电极61c及绝缘层307上配置于多个第一mr元件50b的周围和多个第二mr元件50c的周围。多个上部电极62b配置在多个第一mr元件50b及绝缘层308之上。多个上部电极62c配置在多个第二mr元件50c及绝缘层308之上。绝缘层309在绝缘层308之上配置于多个上部电极62b的周围和多个上部电极62c的周围。
57.绝缘层310配置在多个上部电极62b、多个上部电极62c及绝缘层309之上。多个上部线圈要素82配置在绝缘层310之上。磁传感器1还可以包含覆盖多个上部线圈要素82及绝缘层310的未图示的绝缘层。
58.磁传感器1包含支承多个第一mr元件50b和多个第二mr元件50c的支承部件。支承
部件具有相对于基板301的上表面301a倾斜的至少一个倾斜面。在本实施方式中,特别地,支承部件由绝缘层305构成。此外,在图5中,示出磁传感器1的构成要素中的绝缘层305、多个第一mr元件50b、多个第二mr元件50c及多个上部线圈要素82。
59.绝缘层305分别具有向远离基板301的上表面301a的方向(z方向)伸出的多个凸面305c。多个凸面305c各自在与u方向平行的方向上延伸。凸面305c的整体形状是使图6所示的凸面305c的曲线形状(拱形)沿着与u方向平行的方向移动而成的半圆筒状的曲面。另外,多个凸面305c以规定的间隔在与v方向平行的方向上并排。
60.多个凸面305c各自具有距基板301的上表面301a最远的上端部。在本实施方式中,多个凸面305c各自的上端部在与u方向平行的方向上延伸。在此,着眼于多个凸面305c中的任意一个凸面305c。凸面305c包含第一倾斜面305a和第二倾斜面305b。第一倾斜面305a是凸面305c中比凸面305c的上端部靠v方向侧的面。第二倾斜面305b是凸面305c中比凸面305c的上端部靠-v方向侧的面。在图5中,由虚线表示第一倾斜面305a和第二倾斜面305b的边界。
61.凸面305c的上端部也可以是第一倾斜面305a和第二倾斜面305b的边界。该情况下,图5所示的虚线表示凸面305c的上端部。
62.基板301的上表面301a平行于xy平面。第一倾斜面305a和第二倾斜面305b各自相对于基板301的上表面301a即xy平面倾斜。在与基板301的上表面301a垂直的截面中,第一倾斜面305a和第二倾斜面305b的间隔随着远离基板301的上表面301a而变小。
63.在本实施方式中,因为凸面305c存在多个,所以第一倾斜面305a和第二倾斜面305b也分别存在多个。绝缘层305具有多个第一倾斜面305a和多个第二倾斜面305b。
64.绝缘层305还具有存在于多个凸面305c的周围的平坦面305d。平坦面305d是与基板301的上表面301a平行的面。多个凸面305c各自从平坦面305d向z方向突出。另外,在本实施方式中,多个凸面305c隔开规定的间隔配置。因此,在v方向上相邻的两个凸面305c之间存在平坦面305d。
65.绝缘层305分别包含向z方向突出的多个突出部和存在于多个突出部的周围的平坦部。多个突出部各自在与u方向平行的方向上延伸,并且具有凸面305c。另外,多个突出部以规定的间隔沿与v方向平行的方向并排。平坦部的厚度(z方向的尺寸)实质上恒定。
66.此外,绝缘层304具有实质上恒定的厚度(z方向的尺寸),沿着绝缘层305的下表面形成。绝缘层306具有实质上恒定的厚度(z方向的尺寸),沿着绝缘层305的上表面形成。
67.在本实施方式中,特别地,绝缘层305包含配置在绝缘层304之上的第一层3051和配置在第一层3051之上的第二层3052。第二层3052包含相互分离的多个部分。绝缘层306配置在第一层3051的上表面中的未配置第二层3052的部分和第二层3052的上表面上。多个第一倾斜面305a和多个第二倾斜面305b各自遍及第一层3051和第二层3052形成。
68.多个下部电极61b配置在多个第一倾斜面305a之上。多个下部电极61c配置在多个第二倾斜面305b之上。如上所述,因为第一倾斜面305a和第二倾斜面305b各自相对于基板301的上表面301a即xy平面倾斜,所以多个下部电极61b各自的上表面和多个下部电极61c各自的上表面也相对于xy平面倾斜。因此,可以说多个第一mr元件50b和多个第二mr元件50c配置在相对于xy平面倾斜的倾斜面上。绝缘层305是用于将多个第一mr元件50b和多个第二mr元件50c各自支承为相对于xy平面倾斜的部件。
69.此外,在本实施方式中,第一倾斜面305a为曲面。因此,第一mr元件50b沿着曲面(第一倾斜面305a)弯曲。在本实施方式中,为了便于说明,将第一mr元件50b的磁化固定层52的磁化的方向如上述定义为直线的方向。第一mr元件50b的磁化固定层52的磁化的方向即w1方向及-w1方向也是第一倾斜面305a中的与第一mr元件50b附近的部分相接的切线延伸的方向。
70.同样,在本实施方式中,第二倾斜面305b为曲面。因此,第二mr元件50c沿着曲面(第二倾斜面305b)弯曲。在本实施方式中,为了便于说明,将第二mr元件50c的磁化固定层52的磁化的方向如上述定义为直线的方向。第二mr元件50c的磁化固定层52的磁化的方向即w2方向及-w2方向也是第二倾斜面305b中的与第二mr元件50c附近的部分相接的切线延伸的方向。
71.如图5所示,多个第一mr元件50b以沿u方向和v方向分别各并排多个的方式排列。在一个第一倾斜面305a之上,多个第一mr元件50b并排成一列。同样,多个第二mr元件50c以沿u方向和v方向分别各并排多个的方式排列。在一个第二倾斜面305b之上,多个第二mr元件50c并排成一列。在本实施方式中,多个第一mr元件50b的列和多个第二mr元件50c的列在与v方向平行的方向上交替并排。
72.此外,从z方向观察时,相邻的一个第一mr元件50b和一个第二mr元件50c可以在与u方向平行的方向上错开,也可以不错开。另外,从z方向观察时,隔着一个第二mr元件50c相邻的两个第一mr元件50b可以在与u方向平行的方向上错开,也可以不错开。另外,从z方向观察时,隔着一个第一mr元件50b相邻的两个第二mr元件50c可以在与u方向平行的方向上错开,也可以不错开。
73.多个第一mr元件50b通过多个下部电极61b和多个上部电极62b串联连接。在此,参照图7详细说明多个第一mr元件50b的连接方法。在图7中,符号61表示与任意的mr元件50对应的下部电极,符号62表示与任意的mr元件50对应的上部电极。如图7所示,各个下部电极61具有细长的形状。在下部电极61的长边方向上相邻的两个下部电极61之间形成有间隙。在下部电极61的上表面上,在长边方向的两端附近分别配置有mr元件50。另外,各个上部电极62具有细长的形状,被配置于在下部电极61的长边方向上相邻的两个下部电极61上,将相邻的两个mr元件50彼此电连接。
74.虽然未图示,但位于并排成一列的多个mr元件50的列的一端的一个mr元件50与位于在与下部电极61的长边方向交叉的方向上相邻的其它多个mr元件50的列的一端的另一个mr元件50连接。这两个mr元件50通过未图示的电极相互连接。未图示的电极也可以是将两个mr元件50的下表面彼此或上表面彼此连接的电极。
75.在图7所示的mr元件50是第一mr元件50b的情况下,图7所示的下部电极61与下部电极61b对应,图7所示的上部电极62与上部电极62b对应。另外,该情况下,下部电极61的长边方向成为与u方向平行的方向。
76.同样,多个第二mr元件50c通过多个下部电极61c和多个上部电极62c串联连接。有关上述多个第一mr元件50b的连接方法的说明也适用于多个第二mr元件50c的连接方法。在图7所示的mr元件50是第二mr元件50c的情况下,图7所示的下部电极61与下部电极61c对应,图7所示的上部电极62与上部电极62c对应。另外,该情况下,下部电极61的长边方向成为与u方向平行的方向。
77.此外,在本实施方式中,将包含反铁磁性层51、磁化固定层52、间隙层53及自由层54的层叠膜作为mr元件50进行说明。但是,也可以将具备该层叠膜、下部电极61和上部电极62的元件作为本实施方式的mr元件。层叠膜包含多个磁性膜。下部电极61是配置于凸面305c和多个磁性膜之间的非磁性金属层。mr元件也可以具备多个层叠膜、多个下部电极61、以及多个上部电极62。
78.多个上部线圈要素82各自在与y方向平行的方向上延伸。另外,多个上部线圈要素82以沿x方向并排的方式排列。在本实施方式中,特别地,从z方向观察时,在多个第一mr元件50b和多个第二mr元件50c中的每一个上重叠有两个上部线圈要素82。
79.多个下部线圈要素81各自在与y方向平行的方向上延伸。另外,多个下部线圈要素81以沿x方向并排的方式排列。多个下部线圈要素81的形状及排列可以与多个上部线圈要素82的形状及排列相同,也可以不同。在图5及图6所示的例子中,多个下部线圈要素81各自的x方向的尺寸比多个上部线圈要素82各自的x方向的尺寸小。另外,在x方向上相邻的两个下部线圈要素81的间隔比在x方向上相邻的两个上部线圈要素82的间隔小。
80.在图5及图6所示的例子中,多个下部线圈要素81和多个上部线圈要素82电连接,以构成对多个第一mr元件50b和多个第二mr元件50c各自的自由层54施加与x方向平行的方向的磁场的线圈80。另外,线圈80例如也可以构成为对第一检测电路20的第一及第二电阻部r21、r22和第二检测电路30的第一及第二电阻部r31、r32中的自由层54施加x方向的磁场,对第一检测电路20的第三及第四电阻部r23、r24和第二检测电路30的第三及第四电阻部r33、r34中的自由层54施加-x方向的磁场。另外,线圈80也可以由处理器40控制。
81.接着,对第一及第二检测信号进行说明。首先,参照图3说明第一检测信号。当与对象磁场的w1方向平行的方向的分量的强度变化时,第一检测电路20的电阻部r21~r24各自的电阻值以电阻部r21、r23的电阻值增加,并且电阻部r22、r24的电阻值减少,或者电阻部r21、r23的电阻值减少,并且电阻部r22、r24的电阻值增加的方式发生变化。由此,信号输出端e21、e22各自的电位发生变化。第一检测电路20构成为生成与信号输出端e21的电位对应的信号作为第一检测信号s21,生成与信号输出端e22的电位对应的信号作为第一检测信号s22。
82.接着,参照图4说明第二检测信号。当对象磁场的与w2方向平行的方向的分量的强度变化时,第二检测电路30的电阻部r31~r34各自的电阻值以电阻部r31、r33的电阻值增加,并且电阻部r32、r34的电阻值减少,或者电阻部r31、r33的电阻值减少,并且电阻部r32、r34的电阻值增加的方式发生变化。由此,信号输出端e31、e32各自的电位发生变化。第二检测电路30构成为生成与信号输出端e31的电位对应的信号作为第二检测信号s31,生成与信号输出端e32的电位对应的信号作为第二检测信号s32。
83.接着,对处理器40的动作进行说明。处理器40构成为基于第一检测信号s21、s22及第二检测信号s31、s32生成第一检测值和第二检测值。第一检测值是与对象磁场的平行于v方向的方向的分量对应的检测值。第二检测值是与对象磁场的平行于z方向的方向的分量对应的检测值。以下,用符号sv表示第一检测值,用符号sz表示第二检测值。
84.处理器40例如如下生成第一及第二检测值sv、sz。处理器40首先通过包含求取第一检测信号s21和第一检测信号s22之差s21-s22的运算,生成值s1,并且通过包含求取第二检测信号s31和第二检测信号s32之差s31-s32的运算,生成值s2。接着,处理器40使用下
式(1)、(2)计算值s3、s4。
85.s3=(s2+s1)/(2cosα)
…
(1)
86.s4=(s2-s1)/(2sinα)
…
(2)
87.第一检测值sv可以是值s3本身,也可以是对值s3实施了增益调整及偏移调整等规定的修正的值。同样,第二检测值sz可以是值s4本身,也可以是对值s4实施了增益调整及偏移调整等规定的修正的值。
88.接着,参照图8~图11对本实施方式的磁传感器1的制造方法进行说明。图8~图11表示磁传感器1的制造过程中的层叠体。在磁传感器1的制造方法中,首先,如图8所示,在基板301之上形成绝缘层302。接着,在绝缘层302之上形成多个下部线圈要素81、由导电材料构成的连接层83、以及绝缘层303。接着,在多个下部线圈要素81、连接层83及绝缘层303之上形成绝缘层304。
89.图9表示下一工序。在该工序中,首先选择性地蚀刻绝缘层304,在绝缘层304上形成使连接层83的上表面露出的开口部。接着,在连接层83的上表面之上形成由导电材料构成的金属膜84。接着,在金属膜84之上形成由导电材料构成的连接层85。接着,在连接层85的周围形成绝缘层305的第一层3051。
90.图10表示下一工序。在该工序中,首先,在连接层85的上表面之上形成由导电材料构成的金属膜86。接着,在金属膜86及绝缘层305的第一层3051之上形成绝缘层305的第二层3052。
91.图11表示下一工序。在该工序中,以在绝缘层305上形成多个凸面305c的方式,对第一层3051及第二层3052进行蚀刻。多个凸面305c例如通过在第二层3052之上形成多个蚀刻掩模后,以除去多个蚀刻掩模的方式对第一层3051、第二层3052及多个蚀刻掩模进行蚀刻而形成。多个蚀刻掩模具有与多个凸面305c对应的形状。第一层3051中未被多个蚀刻掩模覆盖的部分成为平坦面305d。在该蚀刻中,金属膜86作为用于保护连接层85的蚀刻阻挡层发挥功能。
92.连接层85是被埋入在第一层3051中的结构物。连接层85具有距基板301的上表面301a最远的端面即上表面。连接层85的端面(上表面)被配置于在与基板301的上表面301a垂直的方向、即与z方向平行的方向上与第一层3051和第二层3052的界面实质上相同的位置。
93.以下,参照图6,对蚀刻第一层3051及第二层3052后的工序进行说明。首先,在第一层3051及第二层3052之上形成绝缘层306。接着,在绝缘层306之上形成多个下部电极61b、多个下部电极61c、多个第一mr元件50b、多个第二mr元件50c、多个上部电极62b、多个上部电极62c以及绝缘层307~309。
94.接着,在多个上部电极62b、多个上部电极62c及绝缘层309之上形成绝缘层310。接着,在绝缘层310之上形成多个上部线圈要素82。由此,完成磁传感器1。
95.连接层83、85也可以用作连接多个下部线圈要素81和多个上部线圈要素82的连接部。该情况下,例如,也可以在形成绝缘层310之后、且形成多个上部线圈要素82之前,选择性地蚀刻绝缘层306~310,形成使金属膜86露出的开口部,且在该开口部内形成由导电材料构成的未图示的连接层。多个上部线圈要素82形成为在形成未图示的连接层之后与未图示的连接层连接。
96.或者,金属膜86也可以作为任意的电极焊盘(例如线圈80的电极焊盘)使用。该情况下,例如,也可以在蚀刻第一层3051和第二层3052之后、且形成绝缘层306之前,形成覆盖金属膜86的光致抗蚀剂层。光致抗蚀剂层例如在形成上部线圈要素82之后被除去。
97.接着,对本实施方式的磁传感器1的结构上的特征进行说明。磁传感器1包含具有上表面301a的基板301、配置在基板301之上的支承部件、第一mr元件50b、以及第二mr元件50c。在本实施方式中,特别地,绝缘层305与支承部件对应。多个下部线圈要素81和绝缘层302~304介于基板301和绝缘层305之间。绝缘层305具有第一倾斜面305a和第二倾斜面305b。
98.第一及第二mr元件50b、50c各自至少包含两个磁性膜、即磁化固定层52及自由层54。第一mr元件50b的上述两个磁性膜构成第一mr元件50b的一部分(主要部分)。第二mr元件50c的上述两个磁性膜构成第二mr元件50c的一部分(主要部分)。以下,将上述两个磁性膜称为功能层。第一mr元件50b的功能层配置在第一倾斜面305a之上。第二mr元件50c的功能层配置在第二倾斜面305b之上。另外,绝缘层305包含第一层3051和配置在第一层3051之上的第二层3052。第一层3051和第二层3052例如各自由sio2等绝缘材料形成。
99.下面,参照图12详细说明第一倾斜面305a、第二倾斜面305b、第一层3051及第二层3052的特征。图12是用于说明支承部件即绝缘层305的形状的说明图。
100.第一倾斜面305a和第二倾斜面305b各自遍及第一层3051和第二层3052形成。另外,第一倾斜面305a和第二倾斜面305b朝向互不相同的方向。在一个凸面305c中,第一倾斜面305a和第二倾斜面305b也可以以垂直于基板301的上表面301a的假想的uz平面为中心而对称。
101.从磁传感器1的低高度化的观点出发,与基板301的上表面301a垂直的方向、即与z方向平行的方向上的第一倾斜面305a和第二倾斜面305b各自的尺寸在1.4μm以上3.0μm以下的范围。
102.第一倾斜面305a具有最接近基板301的上表面301a的第一端缘305a1和距基板301的上表面301a最远的第二端缘305a2。第一端缘305a1位于第一层3051。第二端缘305a2位于第二层3052。
103.第二倾斜面305b具有最接近基板301的上表面301a的第一端缘305b1和距基板301的上表面301a最远的第二端缘305b2。第一端缘305b1位于第一层3051。第二端缘305b2位于第二层3052。此外,在图12所示的例子中,第二倾斜面305b的第二端缘305b2与第一倾斜面305a的第二端缘305a2一致。
104.第一层3051具有最接近基板301的上表面301a的下端部3051a和距基板301的上表面301a最远的上端部3051b。第二层3052具有最接近基板301的上表面301a的下端部3052a和距基板301的上表面301a最远的上端部3052b。从第一层3051和第二层3052的界面到第一层3051的下端部3051a的距离小于从第一层3051和第二层3052的界面到第二层3052的上端部3052b的距离。
105.第一倾斜面305a的第一端缘305a1在与基板301的上表面301a垂直的方向即与z方向平行的方向上,配置于第一层3051的下端部3051a与上端部3051b之间。另外,第二倾斜面305b的第一端缘305b1在与z方向平行的方向上配置于第一层3051的下端部3051a和上端部3051b之间。
106.第一mr元件50b的功能层沿着第二层3052的表面配置,但不沿着第一层3051的表面配置。另外,第二mr元件50c的功能层沿着第二层3052的表面配置,但不沿着第一层3051的表面配置。
107.在本实施方式中,第一倾斜面305a是整体上平滑的曲面。在第一倾斜面305a中的第一层3051和第二层3052的边界的位置没有台阶。同样,在本实施方式中,第二倾斜面305b是整体上平滑的曲面。在第二倾斜面305b的第一层3051和第二层3052的边界的位置没有台阶。
108.接着,参照图13,对支承部件即绝缘层305的凸面305c的特征进行说明。图13是用于说明凸面305c的形状的说明图。绝缘层305具有凸面305c。凸面305c向远离基板301的上表面301a的方向伸出。凸面305c的至少一部分相对于基板301的上表面301a倾斜。在本实施方式中,特别地,凸面305c包含第一倾斜面305a和第二倾斜面305b。
109.凸面305c具有距基板301的上表面301a最远的上端部e1。上端部e1也可以与图12所示的第一倾斜面305a的第二端缘305a2和第二倾斜面305b的第二端缘305b2一致。
110.与基板301的上表面301a垂直的方向、即与z方向平行的方向上的凸面305c的尺寸和与z方向平行的方向上的第一及第二倾斜面305a、305b各自的尺寸相同。即,与z方向平行方向上的凸面305c的尺寸在1.4μm以上3.0μm以下的范围内。另外,与v方向平行方向上的凸面305c的尺寸例如为3μm以上16μm以下。
111.凸面305c包括包含上端部e1的第一曲面部分305c1、第二曲面部分305c2、以及第三曲面部分305c3。第二曲面部分305c2在第一曲面部分305c1的v方向侧的位置与第一曲面部分305c1连续,且在与基板301的上表面301a垂直的方向上位于第一曲面部分305c1和基板301的上表面301a之间。第三曲面部分305c3在与第二曲面部分305c2相反的一侧的位置即第一曲面部分305c1的-v方向侧的位置与第一曲面部分305c1连续,且在与基板301的上表面301a垂直的方向上位于第一曲面部分305c1和基板301的上表面301a之间。另外,第二曲面部分305c2和第三曲面部分305c3各自与平坦面305d连续。
112.第一曲面部分305c1是在远离基板301的上表面301a的方向上凸出的曲面。第二曲面部分305c2和第三曲面部分305c3各自是向接近基板301的上表面301a的方向凸出的曲面。
113.在此,将与基板301的上表面301a垂直的截面、且与vz平面平行的截面称为基准截面。第一曲面部分305c1在基准截面上可以近似为圆弧。在图13中,用符号r1表示基准截面中的第一曲面部分305c1的曲率半径、即近似第一曲面部分305c1整体的圆弧的曲率半径。曲率半径r1为4.25μm以上5.45μm以下。
114.同样,第二曲面部分305c2和第三曲面部分305c3分别在基准截面上可以近似为圆弧。在图13中,用符号r2表示基准截面中第二曲面部分305c2的曲率半径、即近似第二曲面部分305c2的圆弧的曲率半径即,用符号r3表示基准截面中第三曲面部分305c3的曲率半径、即近似第三曲面部分305c3的圆弧的曲率半径。曲率半径r2、r3各自比曲率半径r1小且为0.3μm以上。
115.在此,将基准截面中的凸面305c的形状视为将与基准截面及基板301的上表面301a分别平行的假想的直线上的位置作为独立变量的函数z。上述假想的直线平行于v方向。以下,将上述假想的直线称为v轴,用符号v表示v轴上的位置。函数z是将v作为独立变量
的函数。函数z的值与平行于z方向的方向上的凸面305c的位置对应。图14表示函数z的曲线图。在图14中,横轴表示v轴上的位置,纵轴表示函数z的值。图14实质上表示基准截面中的凸面305c的形状。
116.此外,在图14中,将与凸面305c上端部e1对应的v轴上的位置设为横轴上的原点(0μm),以正值表示比原点靠近v方向侧的位置,以负值表示比原点靠近-v方向侧的位置。另外,在图14中,将与z方向平行的方向上的平坦面305d的位置设为0μm。
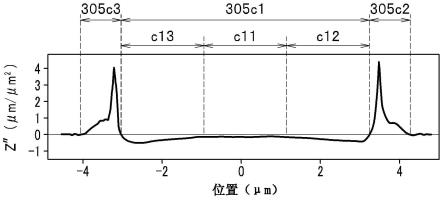
117.图15表示通过用变量v对函数z进行一次微分而得到的一阶导函数z’(dz/dv)的曲线图。在图15中,横轴表示v轴上的位置,纵轴表示一阶导函数z’的值。另外,图16表示通过用变量v对函数z进行二次微分而得到的二阶导函数z”(d2z/dv2)的曲线图。在图15中,横轴表示v轴上的位置,纵轴表示二阶导函数z”的值。
118.二阶导函数z”为0的两个位置表示与第一曲面部分305c1和第二曲面部分305c2的边界对应的v轴上的位置及与第一曲面部分305c1和第三曲面部分305c3的边界对应的v轴上的位置。因此,通过参照图16,能够判别第一~第三曲面部分305c1~305c3各自的位置。在图14~图16中示出第一~第三曲面部分305c1~305c3各自的大致范围。
119.如图16所示,在与第一曲面部分305c1对应的v轴上的位置,二阶导函数z”的值为0以下。另外,在与第二曲面部分305c2对应的v轴上的位置和与第二曲面部分305c3对应的v轴上的位置,二阶导函数z”的值为正值。
120.在此,如图16所示,将第一曲面部分305c1分为第一部分c11、第二部分c12和第三部分c13。第一部分c11是包含凸面305c的上端部e1的部分。第二部分c12是在远离凸面305c的上端部e1的位置且在第一部分c11的v方向侧与第一部分c11连续的部分。第三部分c13是在远离凸面305c的上端部e1的位置且在第一部分c11的-v方向侧与第一部分c11连续的部分。第二部分c12位于第一mr元件50b的下方(-z方向侧)。第三部分c13位于第二mr元件50c的下方(-z方向侧)。在第一部分c11的上方(z方向侧)不存在第一及第二mr元件50b、50c。图16中示出第一~第三部分c11~c13各自的大致范围。
121.与第一部分c11对应的函数z的二阶导函数z”的值的绝对值的平均值小于与第二部分c12对应的函数z的二阶导函数z”的值的绝对值的平均值。同样,与第一部分c11对应的函数z的二阶导函数z”的值的绝对值的平均值小于与第三部分c13对应的函数z的二阶导函数z”的值的绝对值的平均值。
122.另外,在本实施方式中,随着从第一曲面部分305c1中的与v方向平行的方向的一端接近第一曲面部分305c1中的与v方向平行的方向的另一端,与第一曲面部分305c1对应的函数z的一阶导函数z’的值减少或增加。即,随着从第一曲面部分305c1中的-v方向侧的端部接近第一曲面部分305c1中的v方向侧的端部,一阶导函数z’的值变小。或者,随着从第一曲面部分305c1中的v方向侧的端部接近第一曲面部分305c1中的-v方向侧的端部,一阶导函数z’的值变大。
123.接着,对本实施方式的磁传感器1的作用及效果进行说明。在本实施方式中,支承部件即绝缘层305包含第一层3051及第二层3052,并且分别具有遍及第一层3051和第二层3052形成的第一及第二倾斜面305a、305b。在此,考虑在仅由一层绝缘层构成的比较例的支承部件中埋入由金属材料构成的结构物。在比较例的支承部件中,当通过蚀刻在支承部件上形成倾斜面时,由于蚀刻速率的不同,结构物会从通过蚀刻形成的面大幅突出。该情况
下,例如,由于结构物的阴影的影响,产生形成于倾斜面上的一部分电极或mr元件的构图变得困难的问题。
124.与此相对,在本实施方式中,例如,在将结构物埋入第一层3051,且未将结构物埋入第二层3052的状态下,能够在绝缘层305上形成第一倾斜面305a和第二倾斜面305b。由此,根据本实施方式,与比较例的支承部件相比,能够抑制结构物的突出量。
125.此外,第一层3051的绝缘材料和第二层3052的绝缘材料可以相同,也可以互不相同。另外,第一层3051的成膜条件和第二层3052的成膜条件可以相同,也可以互不相同。例如,通过在第一层3051和第二层3052使绝缘材料和成膜条件的至少一方不同,能够使形成于第一层3051的凸面305c的一部分的形状和形成于第二层3052的凸面305c的另一部分的形状互不相同。
126.另外,在本实施方式中,凸面305c分别包含具有上述形状的第一~第三曲面部分305c1~305c3。如果不存在第二及第三曲面部分305c2、305c3,则平坦面305d和第一曲面部分305c1在平坦面305d和第一曲面部分305c1的边界处不连续。因此,绝缘层305的表面不是光滑的表面。与此相对,在本实施方式中,通过凸面305c包含第二及第三曲面部分305c2、305c3,能够使绝缘层305的表面成为平滑的面。由此,根据本实施方式,能够抑制在凸面305c和平坦面305d的边界附近,在绝缘层305上产生裂纹。
127.如上所述,凸面305c的第一曲面部分305c1的曲率半径r1与凸面305c的第二曲面部分305c2的曲率半径r2及凸面305c的第三曲面部分305c3的曲率半径r3不同。第一曲面部分305c1的至少一部分形成于第二层3052。第二曲面部分及第三曲面部分305c2、305c3各自的至少一部分形成于第一层3051。根据本实施方式,例如,通过在第一层3051和第二层3052使绝缘材料和成膜条件的至少一方不同,能够分别调整第一层3051的蚀刻速率和第二层3052的蚀刻速率。由此,根据本实施方式,容易在将曲率半径r1设为优选范围的同时将曲率半径r2、r3调整为优选的范围。
128.在本实施方式中,特别地,通过使曲率半径r2、r3在上述范围内,与不存在第二及第三曲面部分305c2、305c3情况、曲率半径小到凸面305c和平坦面305d的边界被认为不连续的程度的情况相比,能够抑制在凸面305c与平坦面305d的边界附近,在绝缘层305上产生裂纹。
129.此外,从图16可以看出,在本实施方式中,与第一曲面部分305c1对应的函数z的二阶导函数z”的值不是恒定的。因此,严格地说,曲率半径r1根据v轴上的位置而变化。在本实施方式中,特别地,与第一曲面部分305c1的第一部分c11对应的函数z的二阶导函数z”的绝对值的平均值小于与第一曲面部分305c1的第二部分c12对应的函数z的二阶导函数z”的绝对值的平均值、及与第一曲面部分305c1的第三部分c13对应的函数z的二阶导函数z”的绝对值的平均值。因此,在本实施方式中,第一部分c11中的曲率半径r1大于第二部分c12中的曲率半径r1及第三部分c13中的曲率半径r1。由此,根据本实施方式,与曲率半径r1不依赖于v轴上的位置而恒定的情况相比,能够减小与z方向平行的方向上的凸面305c的尺寸,即降低凸面305c的高度。
130.另外,在本实施方式中,与z方向平行方向上的凸面305c的尺寸优选为1.4μm以上3.0μm以下的范围内。根据示例性实施方式,通过将凸面305c的尺寸设为1.4μm以上,能够增大第一倾斜面305a和第二倾斜面305b各自的倾斜,能够提高磁传感器1相对于对象磁场的
与z方向平行的方向的分量的灵敏度。其结果,根据示例性实施方式,能够高精度地生成第二检测值sz。另外,根据示例性实施方式,通过将凸面305c的尺寸设为3.0μm以下,在磁传感器1的制造过程中,能够在第一倾斜面305a和第二倾斜面305b之上高精度地形成由光致抗蚀剂层构成的光致抗蚀剂掩模。
131.此外,本发明不限于上述实施方式,可以进行各种变更。例如,磁性检测元件不限于mr元件,也可以是霍尔元件等mr元件以外的检测磁场的元件。
132.另外,本发明的支承部件即绝缘层305也可以仅由一个绝缘层构成。有关绝缘层305的说明除了涉及第一层3051及第二层3052的说明以外,也适用于该一个绝缘层。
133.另外,本发明的支承部件也可以由绝缘层305和绝缘层306构成。该情况下,支承部件具有多个凸面和平坦面。多个凸面和平坦面由绝缘层306的上表面构成。绝缘层306的上表面与绝缘层305的上表面为相似形或大致相似形。因此,由绝缘层306的上表面构成的多个凸面与绝缘层305的多个凸面305c为相似形或大致相似形。有关多个凸面305c的形状及配置的说明,除了与第一层3051及第二层3052相关的说明以外,也适用于由绝缘层306的上表面构成的多个凸面。具体而言,对凸面305c的尺寸的说明、对曲率半径r1~r3的说明、以及对函数z、一阶导函数z’及二阶导函数z”的说明也适用于由绝缘层306的上表面构成的多个凸面。
134.另外,磁传感器1还可以包含构成为检测对象磁场的与xy平面平行的一方向的分量,且生成与该分量具有对应关系的至少一个第三检测信号的方式构成的第三检测电路。该情况下,处理器40也可以构成为基于至少一个第三检测信号生成与对象磁场的平行于u方向的分量对应的检测值。第三检测电路可以与第一及第二检测电路20、30一体化,也可以包含在与第一及第二检测电路20、30不同的芯片中。
135.另外,本发明的传感器元件不限于磁检测元件,也可以是构成为物性根据规定的物理量而变化的传感器元件。作为规定的物理量,不限于磁场,可以举出电场、温度、位移及力等可以由传感器元件检测的任意物象的状态的量。就上述实施方式的说明而言,如果将磁检测元件置换为传感器元件,则也可以适用于具备磁检测元件以外的传感器元件的磁传感器以外的传感器。该情况下,功能层可以是构成传感器元件的至少一部分的部分,也可以是物性根据规定的物理量而变化的部分。另外,该情况下,金属层也可以是任意的配线层。
136.如上所述,本发明的传感器是构成为检测规定的物理量的传感器。本发明的传感器包含具有上表面的基板、配置在基板之上的支承部件、以及构成为物性根据规定的物理量而变化的传感器元件。支承部件具有向远离基板的上表面的方向伸出并且至少一部分相对于基板的上表面倾斜的凸面。传感器元件包含构成传感器元件的至少一部分的功能层。功能层配置在凸面之上。凸面具有距基板的上表面最远的上端部,并且包括包含凸面的上端部且向远离基板的上表面的方向凸出的曲面部分。曲面部分包括包含凸面的上端部的第一部分、和在远离凸面的上端部的位置与第一部分连续的第二部分。在将与基板的上表面垂直的截面中的凸面的形状视为以与截面及基板的上表面各自平行的假想的直线上的位置为变量的函数z时,与第一部分对应的函数z的二阶导函数z”的值的绝对值的平均值小于与第二部分对应的函数z的二阶导函数z”的值的绝对值的平均值。
137.在本发明的传感器中,功能层也可以配置在第二部分之上。
138.另外,在本发明的传感器中,与曲面部分对应的函数z的二阶导函数z”的值也可以
为0以下。
139.另外,在本发明的传感器中,也可以是,随着从曲面部分的与基板的上表面平行的规定方向的一端接近曲面部分的规定方向的另一端,与曲面部分对应的函数z的一阶导函数z’的值减少或增加。
140.另外,在本发明的传感器中,凸面还可以包含与第二部分连续且在与基板的上表面垂直的方向上位于第二部分和基板的上表面之间的其它曲面部分。其它曲面部分也可以是向接近基板的上表面的方向凸出的曲面。与曲面部分和其它曲面部分的边界对应的函数z的二阶导函数z”的值也可以为0。
141.另外,在本发明的传感器中,与基板的上表面垂直的方向上的凸面的尺寸也可以为1.4μm以上且3.0μm以下。
142.另外,在本发明的传感器中,规定的物理量也可以是对象磁场的方向及对象磁场的强度的至少一方。传感器元件也可以是构成为检测对象磁场的方向及对象磁场的强度的至少一方的变化的磁检测元件。磁检测元件也可以是磁阻效应元件。功能层也可以包含多个磁性膜。磁阻效应元件还可以包含配置于凸面和多个磁性膜之间的非磁性金属层。
143.基于以上的说明可知,能够实施本发明的各种方式及变形例。因此,在权利要求的均等的范围内,即使是上述的最佳形式以外的形式,也能够实施本发明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1