一种基于抗差估计的弹性导航交互式信息融合方法
1.本发明涉及一种基于抗差估计的弹性导航交互式信息融合方法,属于多源信息融合技术,特别适用于弹性pnt(positioning,navigation and timing,定位、导航与授时)领域。
背景技术:
2.单一传感器的自主导航系统在复杂应用环境下一方面暴露出脆弱性和局限性,另一方面突出表现为以故障、偏差为典型现象的模型失配,无法满足生命安全关键应用对定位精度、完好性、连续性等的要求,自动驾驶、行人导航、无人机物流以及协同导航、智慧交通系统等自主导航应用必须应对和克服复杂挑战环境对导航信号和导航模型造成的挑战。多传感器融合导航凭借冗余性和传感器间的互补特性已应用于无人自主导航、智能交通等领域,基于传统的多源融合滤波技术强调借助多个传感器的冗余度以及互补特性实现最终估计状态的最优性。但是,传统信息融合方式无法实现传感器的优选、自适应容错等功能。弹性pnt是近些年来受到较多关注的新兴pnt服务模式。弹性pnt强调的是以多源pnt传感器优化集成为平台,以函数模型弹性调整和随机模型弹性优化为手段,融合生成适应多种复杂环境的pnt信息,以提高海、陆、空、天等各领域关键任务应用的可靠性和安全性。弹性导航要求以多个传感器获得的信息为基础,建立弹性的观测模型和系统模型,在各种应用场景下均能提供稳定、可信的导航服务。该技术不仅要求导航结果的可靠性,同时要求导航系统对所处运行环境弹性调整和自适应。目前弹性导航仍处于起步阶段,相关技术仍有待进一步拓展、完善。为了进一步提高多源导航系统的可靠性和鲁棒性,本发明致力于实现对多源导航系统中传感器的有效管理以及多源导航系统鲁棒性的提高,丰富弹性导航技术内涵。
技术实现要素:
3.发明目的:为了提高多传感器融合导航系统的可靠性和鲁棒性,本发明提供一种基于抗差估计的弹性交互式信息融合方法。
4.为了实现所述目的,本发明可以通过以下技术方案实现:
5.一种基于抗差估计的弹性导航交互式信息融合方法,包括如下步骤:
6.步骤1,根据多源导航系统误差模型建立状态方程;
7.步骤2,构建各独立传感器的量测模型并分别与状态方程联立建立m个独立滤波通道,其中m表示观测型传感器的个数;
8.步骤3,对m个独立滤波通道分别进行抗差扩展卡尔曼滤波;
9.步骤4,计算各独立滤波通道对应的后验权重;
10.步骤5,根据权重对各独立滤波输出的估计状态及误差协方差进行加权处理,输出交互式融合的状态估计以及误差协方差矩阵。
11.步骤6,利用各独立滤波通道输出的估计状态及其误差协方差矩阵计算下一时刻
的初始化状态以及误差协方差矩阵。
12.所述步骤1包括如下过程:
13.根据组合导航系统误差模型建立状态方程,
14.xk=φ
k/k-1
x
k-1
+w
k-1
15.其中,φ
k/k-1
表示从(k-1)时刻到k时刻的状态转移矩阵,xk表示时刻k的状态,w
k-1
是时刻(k-1)的系统噪声。
16.所述步骤2包括如下过程:
17.在每一个独立更新通道构建各独立传感器的量测模型并分别与状态方程联立建立m个独立滤波通道,其中m表示观测型传感器的个数,
[0018][0019]
其中,(i)表示第i个独立滤波通道,i=1,
…
,m,表示从(k-1)时刻到k时刻的状态转移矩阵,表示状态和观测之间的线性关系,是(k-1)时刻的系统噪声,是时刻k的观测噪声,上述噪声量之间相互独立,且均服从零均值的高斯分布,两者的协方差矩阵分别用和表示,由于各通道间的独立性,因此各通道的系统模型建立是完全开放化的;
[0020]
所述步骤3具体包括以下过程:
[0021]
对m个独立滤波通道分别进行抗差扩展卡尔曼滤波;
[0022]
步骤3-1,建立各独立滤波通道的离散化方程:
[0023][0024]
其中,i表示第i个独立滤波通道,i=1,
…
,m,表示从(k-1)时刻到k时刻的状态转移矩阵,表示状态和观测之间的线性关系,是时刻(k-1)的系统噪声,是时刻k的观测噪声,上述噪声量之间相互独立,且均服从零均值的高斯分布,两者的协方差矩阵分别用和表示;
[0025]
步骤3-2,利用扩展卡尔曼滤波计算预测状态及误差协方差:
[0026][0027]
其中,为(k-1)时刻的预测状态,是独立滤波通道i的初始化状态,是独立滤波通道i的初始化误差协方差矩阵;
[0028]
步骤3-3,计算扩展卡尔曼滤波新息及其协方差:
[0029]
[0030]
其中,表示独立滤波通道i的新息,是新息的协方差矩阵;
[0031]
步骤3-4,计算抗差卡尔曼滤波的等价权矩阵:
[0032]
利用标准化新息构造等价权重矩阵选取igg-iii等价权函数计算该矩阵,用于计算等价权重阵对角元素的igg-iii函数表达式为:
[0033][0034]
其中,表示标准化新息第s个分量,k0,k1表示抗差系数,分别用于界定观测值是否有效或者是否淘汰的门限,k0,k1的取值依赖经验,k0∈[1.0 1.5],k1∈[2.5 3.0];
[0035]
步骤3-5,计算抗差扩展卡尔曼滤波的状态估计及其协方差:
[0036][0037]
其中,是扩展卡尔曼滤波的卡尔曼增益矩阵,是抗差扩展卡尔曼滤波的状态估计,是抗差扩展卡尔曼滤波的协方差,i表示单位矩阵。
[0038]
所述步骤4包括如下过程:
[0039]
计算各独立滤波通道对应的后验权重:
[0040]
步骤4-1,计算各独立滤波通道的似然函数值,
[0041][0042]
其中,表示独立滤波通道i在k时刻的似然函数值;
[0043]
步骤4-2,计算各独立滤波通道的后验权重,
[0044][0045]
其中,表示独立滤波通道i在k时刻的后验权重。
[0046]
所述步骤5包括如下过程:
[0047]
根据权重对各独立滤波输出的估计状态及误差协方差进行加权处理,输出交互式融合的状态估计以及误差协方差矩阵,
[0048][0049]
其中,是交互式融合的状态估计,表示独立滤波通道i在k时刻的状态估计,是交互式融合的误差协方差矩阵,是独立滤波通道i在k时刻的误差协方差矩阵。
[0050]
所述步骤6包括如下过程:
[0051]
利用各独立滤波通道输出的估计状态及其误差协方差矩阵计算下一时刻的初始化状态以及误差协方差矩阵,
[0052]
步骤6-1,定义包含各独立滤波通道优先级信息的先验转移概率:
[0053]
根据各独立滤波通道中系统模型的观测噪声协方差,以马尔可夫转移概率矩阵的形式确定各通道的优先级并定义为先验转移概率矩阵;
[0054]
步骤6-2,计算各独立滤波通道的先验权重:
[0055][0056]
其中,π
ji
是独立滤波通道j到独立滤波通道i的先验转移概率,其为马尔可夫概率转移矩阵的元素,表示独立滤波通道j在k时刻的后验权重,是独立滤波通道j转移到独立滤波通道i的权重;
[0057]
步骤6-3,计算各独立滤波通道的初始化状态以及误差协方差矩阵:
[0058][0059]
其中,是独立滤波通道i在k+1时刻的初始化状态,是独立滤波通道i在k+1时刻的初始化误差协方差矩阵。
[0060]
相对于现有技术,本发明的优点如下:本发明提供了一种基于抗差估计的弹性导航交互式信息融合方法,1)该方法在传统扩展卡尔曼滤波的基础上,使用基于igg-iii等价权函数的权重矩阵对各独立传感器的观测值分别进行加权处理,保证各独立传感器观测值的可靠性并避免卡尔曼滤波估计值因异常观测值的干扰导致失真甚至不收敛现象;2)利用抗差标准化新息向量计算各通道的模型似然函数值,提高多传感器融合系统中各独立通道的可用性;3)独立滤波通道和交互式信息融合框架保持了对可用传感器的开放性,可以实现对可用导航源的即插即用;4)后验权重和抗差估计可以实现对多传感器的在线优选。
附图说明
[0061]
结合附图和具体实施方式对本发明做进一步阐述,凸显本发明在弹性导航定位领
域的特点以及优势。
[0062]
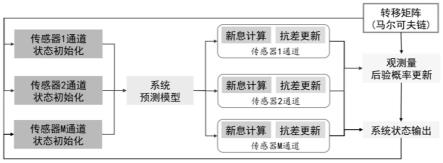
图1为本发明为具体是实施方式提供的基于抗差估计的弹性导航交互式信息融合方法流程图。
具体实施方式
[0063]
实施例1:参见图1,一种基于抗差估计的弹性导航交互式信息融合方法,包括如下步骤:
[0064]
步骤1,根据多源导航系统误差模型建立状态方程:
[0065]
xk=φ
k/k-1
x
k-1
+w
k-1
[0066]
其中,φ
k/k-1
表示从(k-1)时刻到k时刻的状态转移矩阵,xk表示时刻k的状态,w
k-1
是时刻(k-1)的系统噪声。
[0067]
步骤2,在每一个独立更新通道构建各独立传感器的量测模型并分别与状态方程联立建立m个独立滤波通道,其中m表示观测型传感器的个数,
[0068][0069]
其中,(i)表示第i个独立滤波通道,i=1,
…
,m,表示从(k-1)时刻到k时刻的状态转移矩阵,表示状态和观测之间的线性关系,是(k-1)时刻的系统噪声,是时刻k的观测噪声,上述噪声量之间相互独立,且均服从零均值的高斯分布,两者的协方差矩阵分别用和表示,由于各通道间的独立性,因此各通道的系统模型建立是完全开放的,这一特点实现了模型算法的弹性选择。
[0070]
步骤3,对m个独立滤波通道分别进行抗差扩展卡尔曼滤波:
[0071]
步骤3-1,建立各独立滤波通道的离散化方程:
[0072][0073]
其中,(i)表示第i个独立滤波通道,i=1,
…
,m,表示从(k-1)时刻到k时刻的状态转移矩阵,表示状态和观测之间的线性关系,是时刻(k-1)的系统噪声,是时刻k的观测噪声,上述噪声量之间相互独立,且均服从零均值的高斯分布,两者的协方差矩阵分别用和表示。
[0074]
步骤3-2,利用扩展卡尔曼滤波计算预测状态及误差协方差:
[0075][0076]
其中,为(k-1)时刻的预测状态,是独立滤波通道i的初始化状态,是独立滤波通道i的初始化误差协方差矩阵。
[0077]
步骤3-3,计算扩展卡尔曼滤波新息及其协方差:
[0078][0079]
其中,表示独立滤波通道i的新息,是新息的协方差矩阵。
[0080]
步骤3-4,计算抗差卡尔曼滤波的等价权矩阵:
[0081]
利用标准化新息构造等价权重矩阵选取igg-iii等价权函数计算该矩阵,用于计算等价权重阵对角元素的igg-iii函数表达式为:
[0082][0083]
其中,表示标准化新息第s个分量,k0,k1表示抗差系数,分别用于界定观测值是否有效或者是否淘汰的门限,k0,k1的取值依赖经验,k0∈[1.0 1.5],k1∈[2.5 3.0]。
[0084]
步骤3-5,计算抗差扩展卡尔曼滤波的状态估计及其协方差:
[0085][0086]
其中,是扩展卡尔曼滤波的卡尔曼增益矩阵,是抗差扩展卡尔曼滤波的状态估计,是抗差扩展卡尔曼滤波的协方差,i表示单位矩阵。
[0087]
步骤4,计算各独立滤波通道对应的后验权重:
[0088]
步骤4-1,计算各独立滤波通道的似然函数值,
[0089][0090]
其中,表示独立滤波通道i在k时刻的似然函数值。
[0091]
步骤4-2,计算各独立滤波通道的后验权重,
[0092][0093]
其中,表示独立滤波通道i在k时刻的后验权重。
[0094]
步骤5,根据权重对各独立滤波输出的估计状态及误差协方差进行加权处理,输出交互式融合的状态估计以及误差协方差矩阵:
[0095][0096]
其中,其中,是交互式融合的状态估计,表示独立滤波通道i在k时刻的状态估计,是交互式融合的误差协方差矩阵,是独立滤波通道i在k时刻的误差协方差矩阵。该过程实现了交互式的信息融合。
[0097]
步骤6,利用各独立滤波通道输出的估计状态及其误差协方差矩阵计算下一时刻的初始化状态以及误差协方差矩阵:
[0098]
步骤6-1,定义包含各独立滤波通道优先级信息的先验转移概率:
[0099]
根据各独立滤波通道中系统模型的观测噪声协方差,以马尔可夫转移概率矩阵的形式确定各通道的优先级并定义为先验转移概率矩阵。
[0100]
步骤6-2,计算各独立滤波通道的先验权重:
[0101][0102]
其中,π
ji
是独立滤波通道j到独立滤波通道i的先验转移概率,其为马尔可夫概率转移矩阵的元素,表示独立滤波通道j在k时刻的后验权重,是独立滤波通道j转移到独立滤波通道i的权重;
[0103]
步骤6-3,计算各独立滤波通道的初始化状态以及误差协方差矩阵:
[0104][0105]
其中,是独立滤波通道i在k+1时刻的初始化状态,是独立滤波通道i在k+1时刻的初始化误差协方差矩阵。
[0106]
本发明提供了一种基于抗差估计的弹性导航交互式信息融合方法,该方法一方面在传统扩展卡尔曼滤波的基础上,使用基于igg-iii等价权函数的权重矩阵对各独立传感器的观测值分别进行加权处理,保证各独立传感器观测值的可靠性并避免卡尔曼滤波估计值因异常观测值的干扰导致失真甚至不收敛现象,另一方面利用抗差标准化新息向量计算各通道的模型似然函数值,提高多传感器融合系统中各独立通道的可用性。应当指出,针对本技术领域的普通技术人员来说,以本发明的发明原理为基础,依然可以作出进一步的优化和改进工作,这些优化和改进仍是本发明的保护范围。特别指出的是,具体实施方式中未进一步明确论述的技术部分都可以用现有的技术实现。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1