一种面向遮挡环境的偏振融合定向方法
1.本发明涉及偏振光定向与信息融合技术领域,具体地说,是指一种面向遮挡环境的偏振融合定向方法。
背景技术:
2.导航技术是为载体提供持续、安全、可靠服务的重要技术,惯性导航系统(ins)和全球卫星导航系统(gnss)是目前应用最广泛的导航系统。然而,在某些情况下,它们可能变得不可靠。例如ins的导航误差随时间累积,gnss信号容易受到电磁干扰。随着对动物导航机制的深入研究,偏振定向技术由于具有长航时、高精度、抗电磁干扰等优异性能,已被应用于无人车、无人机等各种无人平台。
3.虽然在偏振定向方法已经取得了显著的进展,例如在晴天条件下具有较高定向精度和实时性的e矢量偏振定向方法和遮挡环境下抗干扰能力较强的拟合对称轴偏振定向方法,但这些的方法仍然有一些局限性。特别是缺乏对云、树、建筑物等不同遮挡条件的考虑,使得偏振罗盘在遮挡环境下无法发挥实时性和高精度的优势。因此,在遮挡环境下,很难做到高精度和高实时性的偏振定向。
技术实现要素:
4.发明目的:为了解决现有技术中偏振光罗盘在遮挡环境中难以实现高精度、高实时性航向角测量的问题,本发明提供一种面向遮挡环境的偏振融合定向方法。
5.技术方案:一种面向遮挡环境的偏振融合定向方法,包括以下步骤:
6.步骤一:利用偏振相机获取天空偏振图像,根据天空偏振图像,分别采用e矢量偏振定向方法及拟合对称轴偏振定向方法计算航向角,采用拟合对称轴偏振定向方法时,由于需进行图像重绘,其采样频率相对较低;
7.步骤二:将e矢量偏振定向方法输出的航向角作为状态量,拟合对称轴偏振定向方法输出的航向角作为观测量,将状态量和观测量输入多频率变分贝叶斯强跟踪容积卡尔曼滤波器,进行航向角融合;
8.步骤三:已知观测矩阵,在低频率的观测量采样处,高频率的状态量和低频率的观测量均存在,利用观测矩阵计算残差及估计误差,再通过多频率变分贝叶斯强跟踪容积卡尔曼滤波器更新此时的最优航向角;
9.已知状态转移矩阵,在低频率的观测量采样间隔期间,低频率的观测量不存在,利用状态转移矩阵更新估计误差,利用更新后的估计误差更新残差,再利用更新后的残差更新最优航向角。
10.进一步地,步骤一中,在e矢量偏振定向方法中,首先计算天顶区域的偏振信息,通过查阅太阳星历获取导航坐标系下的太阳方位角然后根据瑞利散射理论中入射光e矢量垂直于观测方向和太阳向量组成的平面来获取航向角;
11.在拟合对称轴偏振定向方法中,通过计算所有区域的偏振信息,重新绘制偏振角
图像并选择aop值接近90
°
的点来拟合太阳子午线,最终确定相机坐标系下的太阳子午线与载体体轴的夹角αs,由αs计算出航向角;
12.根据φ、αs分别计算两种方法各自的航向角:
[0013][0014][0015]
其中,是e矢量偏振定向方法得到的航向角,φ是偏振角,是导航坐标系下的太阳方位角,是拟合对称轴偏振定向方法得到的航向角。
[0016]
进一步地,步骤二中,航向角融合的具体方法为:
[0017]
假设高频率的状态量和低频率的观测量均存在,基于多频率变分贝叶斯强跟踪容积卡尔曼滤波器通过变分贝叶斯方法近似状态量和观测噪声方差的联合后验分布,该联合后验分布表示为高斯分布和逆伽马分布的乘积:
[0018][0019]
其中,p(xk,rk|z
1:k
)是k时刻的联合后验分布,pk是k时刻的滤波估计协方差,xk,zk分别表示k时刻的状态量和观测量,表示k时刻状态量的估值,λk,μk是逆伽马分布参数,n(
·
)表示高斯分布,ig(
·
)表示逆伽马分布,观测噪声方差rk可由下式计算得到:
[0020]rk
=(λ
k-n-1)-1
μkꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0021]
其中,n是观测量的维数,λk和μk通过以下公式更新:
[0022]
λk=1+λ
k/k-1
ꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0023][0024]
其中,λ
k/k-1
和μ
k/k-1
是k-1时刻到k时刻的逆伽马分布参数,m=2n为容积点的数量,j=1,2,
…
,m,z
k,j
为第j个容积点的观测量;
[0025]
同时,基于多频率变分贝叶斯强跟踪容积卡尔曼滤波器通过引入衰落因子τk来实时调整p
k/k-1
,
[0026][0027]
其中,p
k/k-1
表示k-1时刻到k时刻的滤波估计协方差,x
k/k-1,j
表示k-1时刻到k时刻的第j个容积点的状态量预测值,表示k-1时刻到k时刻的状态量预测值,qk为状态噪声方差,τk表示为:
[0028][0029][0030]
tr(
·
)表示矩阵的迹,vk是残差的协方差阵,z
k/k-1,j
表示k-1时刻到k时刻的第j个容积点的观测量预测值,表示k-1时刻到k时刻的观测量预测值,ρ是遗忘因子,取值ρ=0.95,γk为残差,表示为:
[0031][0032]
其中,hk代表观测矩阵。
[0033]
进一步地,步骤三中,在低频率的观测量采样处,高频率的状态量和低频率的观测量均存在,残差、估计误差及最优航向角的计算公式为:
[0034]
其中,γk、βk分别为k时刻的残差和估计误差,xk,zk分别表示k时刻的状
[0035][0036]
态量和观测量,表示k时刻状态量的估值,表示k-1时刻到k时刻的状态量预测值,hk代表观测矩阵,kk为卡尔曼滤波增益,表示k-1时刻到k时刻的观测量的预测值。
[0037]
进一步地,步骤三中,在低频率的观测量采样间隔期间,低频率的观测量不存在,估计误差、残差及最优航向角的计算公式为:
[0038][0039]
其中,β
k+1
、γ
k+1
分别为k+1时刻的估计误差和残差,fk是系统的状态转移矩阵,表示k+1时刻状态量的估值,表示k时刻到k+1时刻的状态量预测值,∈
k+1
=diag([∈
1,k
,∈
2,k
,
…
∈
n,k+1
])是调整因子。
[0040]
有益效果:相比较现有技术,本发明提供一种面向遮挡环境的偏振融合定向方法,将基于e矢量偏振定向方法和拟合对称轴偏振定向方法进行融合,同时解决了遮挡环境下e矢量偏振定向方法精度差、拟合对称轴偏振定向方法实时性差的问题,使偏振光罗盘在遮挡环境下也可实现高精度、高实时性定向,提高了偏振罗盘的鲁棒性;
[0041]
通过引入衰落因子来调节增益矩阵的输出,实现了对系统状态的快速跟踪。同时,以系统状态和观测噪声方差为待估计变量,在每次递归状态估计前通过变分贝叶斯学习迭代逼近得到观测噪声的后验分布,从而提高航向角的估计精度;
[0042]
通过引入基于残差补偿的多频数据融合算法来解决采样频率不同导致的数据融合问题,在低频数据采样间隔处,对高频数据进行时间更新和残差补偿,从而实现航向角的无缝融合和输出。
附图说明
[0043]
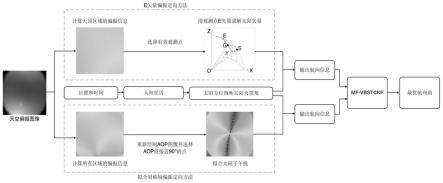
图1是面向遮挡环境的偏振融合定向方法的流程图;
[0044]
图2是多频变分贝叶斯强跟踪容积卡尔曼滤波器的示意图;
[0045]
图3是本发明在静态遮挡环境下的航向角误差图;
[0046]
图4是本发明在动态遮挡环境下的航向角误差图。
具体实施方式
[0047]
下面结合附图和具体实施例对本发明做进一步解释说明。
[0048]
如图1所示,一种面向遮挡环境的偏振融合定向方法,包括以下步骤:
[0049]
步骤一:利用偏振相机获取天空偏振图像,根据天空偏振图像,分别采用e矢量偏
振定向方法及拟合对称轴偏振定向方法计算航向角,采用拟合对称轴偏振定向方法时,由于需进行图像重绘,其采样频率相对较低。
[0050]
本实施例中,在e矢量偏振定向方法中,首先通过天空偏振图像计算天顶区域的偏振信息,选择有效观测点g,其观测方向在入射光坐标系i中可以表示为:
[0051][0052]
其中,o表示偏振罗盘的位置;
[0053]
在入射光坐标系i中,入射光e矢量的方向可以用偏振角φ表示:
[0054][0055]
太阳向量在导航坐标系中可以表示为:
[0056][0057]
其中,和hs是通过太阳星历解算出的太阳在导航坐标系中的方位角和高角度;
[0058]
然后根据瑞利散射模型,入射光e矢量垂直于观测方向和太阳向量组成的平面,所以有:
[0059][0060]
其中,c是可以使两侧模相等的常量,是生成的反对称矩阵,是从导航坐标系到入射光坐标系的方向余弦矩阵,可由航向角表示;
[0061][0062]
最终,e矢量偏振定向方法的航向角通过下式获得:
[0063][0064]
其中,φ为偏振角,是导航坐标系下的太阳方位角。
[0065]
拟合对称轴偏振定向方法是通过计算所有区域的偏振信息,根据aop分布以太阳子午线为对称轴并呈现反对称分布的显著特征,提取太阳子午线周围点的偏振信息;接下来,重新绘制aop图像,并选择aop值接近90
°
的点。最后,将这些点投影到二维平面上,用最小二乘法拟合出太阳子午线,最终确定相机坐标系下的太阳子午线与载体体轴的夹角αs,拟合对称轴偏振定向方法的航向角可表示为:
[0066][0067]
其中,是e矢量偏振定向方法得到的航向角,φ是偏振角,是导航坐标系下的太阳方位角,是拟合对称轴偏振定向方法得到的航向角。
[0068]
步骤二:将e矢量偏振定向方法输出的航向角作为状态量,拟合对称轴偏振定向方法输出的航向角作为观测量,将状态量和观测量输入如图2所示的多率变分贝叶斯强跟踪容积卡尔曼滤波器(mf-vbstckf),进行航向角融合。
[0069]
航向角融合的具体方法为:
[0070]
假设高频率的状态量和低频率的观测量均存在,基于多频率变分贝叶斯强跟踪容积卡尔曼滤波器通过变分贝叶斯方法近似状态量和观测噪声方差的联合后验分布,该联合后验分布表示为高斯分布和逆伽马分布的乘积:
[0071][0072]
其中,p(xk,rk|z
1:k
)是k时刻的联合后验分布,pk是k时刻的滤波估计协方差,xk,zk分别表示k时刻的状态量和观测量,表示k时刻状态量的估值,λk,μk是逆伽马分布参数,n(
·
)表示高斯分布,ig(
·
)表示逆伽马分布,观测噪声方差rk可由下式计算得到:
[0073]rk
=(λ
k-n-1)-1
μkꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0074]
其中,n是观测量的维数,λk和μk通过以下公式更新:
[0075]
λk=1+λ
k/k-1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0076][0077]
其中,λ
k/k-1
和μ
k/k-1
是k-1时刻到k时刻的逆伽马分布参数,m=2n为容积点的数量,j=1,2,
…
,m,z
k,j
为第j个容积点的观测量;
[0078]
同时,基于多频率变分贝叶斯强跟踪容积卡尔曼滤波器通过引入衰落因子τk来实时调整p
k/k-1
,从而实现对状态量的快速跟踪,
[0079][0080]
其中,p
k/k-1
表示k-1时刻到k时刻的滤波估计协方差,x
k/k-1,j
表示k-1时刻到k时刻的第j个容积点的状态量预测值,表示k-1时刻到k时刻的状态量预测值,qk为状态噪声方差,τk表示为:
[0081][0082][0083]
tr(
·
)表示矩阵的迹,vk是残差的协方差阵,z
k/k-1,j
表示k-1时刻到k时刻的第j个容积点的观测量预测值,表示k-1时刻到k时刻的观测量预测值,ρ是遗忘因子,取值ρ=0.95,γk为残差,表示为:
[0084][0085]
其中,hk代表观测矩阵。
[0086]
步骤三:针对低频率的观测量采样处及间隔处,选择使用不同的方法更新最优航向角。因为采样间隔处,不存在低频率的观测量,无法通过式(9)(11)更新观测噪声方差,因此需要根据不同情况选择不同更新方法。
[0087]
(a)在低频率的观测量采样处,高频率的状态量和低频率的观测量均存在,可以根据观测函数获取观测矩阵,利用观测矩阵计算残差及估计误差,再通过多频率变分贝叶斯强跟踪容积卡尔曼滤波器更新此时的最优航向角;
[0088]
因高频状态量和低频观测量均存在,因此残差可由公式(15)表示,而估计误差βk表示为:
[0089][0090]
当低频率的观测量存在时,最优航向角更新公式为:
[0091]
[0092]
其中,γk、βk分别为k时刻的残差和估计误差,xk,zk分别表示k时刻的状态量和观测量,表示k时刻状态量的估值,表示k-1时刻到k时刻的状态量预测值,hk代表观测矩阵,kk为卡尔曼滤波增益,表示k-1时刻到k时刻的观测量的预测值。
[0093]
(b)在低频率的观测量采样间隔期间,低频率的观测量不存在,无法通过式(9)、(11)更新观测噪声方差,r
k+1
会趋于无穷大,而k+1时刻的卡尔曼增益k
k+1
会趋于零,因此k+1时刻的估计误差可以表示为:
[0094][0095]
其中,fk是系统的状态转移矩阵,为k时刻到k+1时刻的状态量预测值。
[0096]
由于观测量z
k+1
不存在,无法通过式(15)更新残差,此时选择利用估计误差更新残差:
[0097][0098]
以上,当低频率的观测量不存在时,由式(18)可知估计误差可进行连续自更新,而由式(19)可知,残差可以用估计误差来表示,在常规形式下的滤波中,最优航向角可以由式(17)表示,而在低频率的观测量采样间隔,卡尔曼增益的大小是未知的并且其值理论上非常小,因此最优航向角的估计公式可以调整为
[0099][0100]
其中,β
k+1
、γ
k+1
分别为k+1时刻的估计误差和残差,表示k+1时刻状态量的估值,∈
k+1
=diag([∈
1,k
,∈
2,k
,
…
∈
n,k+1
])是调整因子,相当于卡尔曼增益。
[0101]
为了验证本方法的效果,通过以下对比实验进行说明。实验所用的偏振罗盘是由偏振相机以及nvidia jetson tx2开发板组成。参考系统的航向角来自高精度紧凑型光纤组合导航系统span-kvh1750,其航向精度可达0.035
°
,采样频率设置为4hz。图1为面向遮挡环境的偏振融合定向方法的流程图,其中e矢量偏振定向方法的采样频率为4hz,拟合对称轴偏振定向方法的采样频率为1hz。图2是多频变分贝叶斯强跟踪容积卡尔曼滤波器的示意图,te和ts分别为e矢量偏振定向方法和的拟合对称轴偏振定向方法采样周期。为了证明本发明的有效性,给出了不同遮挡环境下采用单一偏振定向方法和两种偏振定向方法采用不同融合算法后的对比实验结果。对比采用的融合算法包括:多频率容积卡尔曼滤波算法(mf-ckf)、多频率强跟踪容积卡尔曼滤波算法(mf-stckf)、多频率变分贝叶斯强跟踪容积卡尔曼滤波算法(mf-vbstckf)。图3是本发明在静态遮挡环境下各种方法的航向角误差图,图4是本发明在动态遮挡环境下各种方法的航向角误差图。从图3、图4中可以看出,由于遮挡的影响,e矢量偏振定向方法得到的航向角度变化较大,降低了航向精度。拟合对称轴偏振定向方法得到的航向角即使在有遮挡的情况下也能保持较高的精度,但输出频率较低。通过对低频数据区间的状态量进行残差补偿,所有融合算法的输出频率与e矢量偏振定向方法一致。在三种融合方法中,mf-ckf的最优航向角估计精度最差,mf-stckf通过引入强跟
踪衰落因子,可以更好地跟踪目标状态,但由于观测噪声缺乏实时性估计和更新,仍然存在误差,mf-vbstckf利用变分贝叶斯方法在时变噪声自适应估计方面的优势,可以在保持较高跟踪精度的同时,显著提高航向角的估计性能,减小航向误差,以上可以说明所提出的面向遮挡环境的偏振融合定向方法可以实现高精度、高鲁棒性航向角测量。
[0102]
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明精神和原则之内所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1