多传感器融合定位方法、设备、移动装置和存储介质与流程
本发明涉及无人驾驶领域,尤其涉及一种多传感器融合定位方法、设备、移动装置和存储介质。
背景技术:
1、随着不断进步的无人驾驶技术的商业化应用,无人驾驶车辆的行驶场景多样化在逐步提升,无人驾驶车辆在城市中得以高速发展。例如,社区快递配送车、无人洗地车等无人驾驶车辆穿梭在林立的楼宇之间。城市内高楼林立和立交桥等弱gps(globalpositioning system,全球定位系统)环境日益增多,无人洗地车在上述环境下通常gps信号较弱,而弱gps信号且高相似场景对自动驾驶车辆的定位极其不友好。
2、无人驾驶车辆的定位问题一直是无人驾驶行业深度研究的关键技术,也是实现车辆自动驾驶功能的前提。在高楼林立与立交桥等弱gps环境内,由于场景的特殊性,经常会出现激光、gps以及视觉传感器失效的情况,导致自动驾驶车辆的定位精度下降或者失效,直接影响此类环境下无人驾驶车辆的自动驾驶能力,降低无人驾驶车辆的安全性等。因此,如何提高涵盖隧道、立交桥下等弱gps且结构高相似以及超大空旷环境等城市全环境自动驾驶的定位精度和鲁棒性至关重要。
3、现有技术中,针对隧道、立交桥下等弱gps且高相似环境以及超大空旷环境等城市全环境下定位问题,主要有基于高精度车道线地图与gps的定位方法和基于激光或视觉的定位方法两大类。
4、1、基于高精度车道线地图与gps的定位方法:首先高精度车道线地图会接收到gps发送的车辆位置,然后高精度车道线地图会基于该位置发送出参考车道线;此时自动驾驶车辆上的摄像头会自动检测出当前的车道线;最后,将检测的车道线和参考的高精度车道线地图的车道线匹配得到车辆的位姿,并与gps融合输出优化后的位姿。
5、2、基于激光或视觉的定位方法:首先会获取实时的激光或者视觉传感器数据并进行预处理;然后将实时处理后的激光数据与离线的高精度激光或者视觉地图进行匹配,得到匹配位姿;最后,利用匹配的位姿与imu(inertial measurement unit,惯性测量单元)、轮速计进行融合,得到车辆的最优位姿态信息。
6、在实现本发明过程中,发明人发现相关技术中至少存在如下问题:
7、1、基于高精度车道线地图与gps的定位方法,该方法对隧道等相似且弱gps信号区域,车道线匹配无法获取车辆的真实位置,只能进入特定的车道保持策略,但是对于整个自动驾驶而言,定位模式的切换,导致系统的复杂性提升,稳定性降低,对自动驾驶车辆以及人的安全有较大的影响,因此,该方法不适用弱gps和车道线缺失等场景的高精度定位。
8、2、基于激光或视觉的定位方法,该方法在超空旷或者隧道环境下,激光或者视觉失效,车辆定位精度不断下降,甚至失效,直接影响自动驾驶车辆的安全可靠运行,无法满足城市全场景的自动驾驶运营要求。
技术实现思路
1、为了至少解决现有技术中无法满足城市全场景的自动驾驶运营要求的问题。第一方面,本发明实施例提供一种多传感器融合定位方法,应用于移动装置,包括:
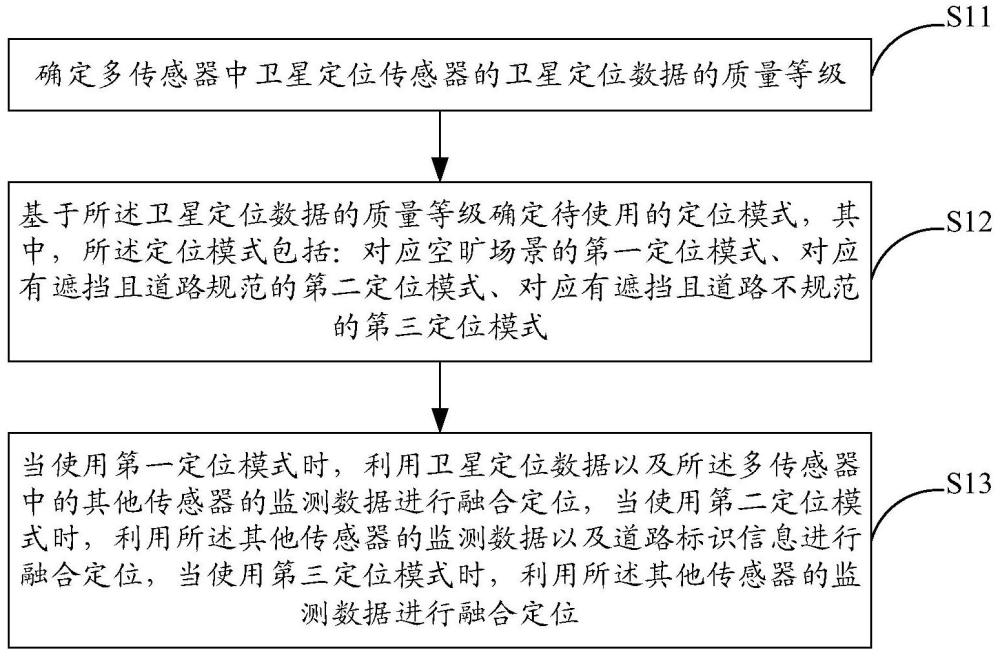
2、确定多传感器中卫星定位传感器的卫星定位数据的质量等级;
3、基于所述卫星定位数据的质量等级确定待使用的定位模式,其中,所述定位模式包括:对应空旷场景的第一定位模式、对应有遮挡且道路规范的第二定位模式、对应有遮挡且道路不规范的第三定位模式;
4、当使用第一定位模式时,利用卫星定位数据以及所述多传感器中的其他传感器的监测数据进行融合定位;
5、当使用第二定位模式时,利用所述其他传感器的监测数据以及道路标识信息进行融合定位;
6、当使用第三定位模式时,利用所述其他传感器的监测数据进行融合定位。
7、第二方面,本发明实施例提供一种多传感器融合定位执行设备,包括:
8、等级确定模块,用于确定多传感器中卫星定位传感器的卫星定位数据的质量等级;
9、定位模式确定模块,用于基于所述卫星定位数据的质量等级确定待使用的定位模式,其中,所述定位模式包括:对应空旷场景的第一定位模式、对应有遮挡且道路规范的第二定位模式、对应有遮挡且道路不规范的第三定位模式;
10、融合定位模块,用于当使用第一定位模式时,利用卫星定位数据以及所述多传感器中的其他传感器的监测数据进行融合定位,当使用第二定位模式时,利用所述其他传感器的监测数据以及道路标识信息进行融合定位,当使用第三定位模式时,利用所述其他传感器的监测数据进行融合定位。
11、第三方面,提供一种电子设备,其包括:至少一个处理器,以及与所述至少一个处理器通信连接的存储器,其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例的多传感器融合定位方法的步骤。
12、第四方面,本发明实施例提供一种移动装置,包括本体和所述本体上安装的本发明任一实施例所述的电子设备。
13、第五方面,本发明实施例提供一种存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现本发明任一实施例的多传感器融合定位方法的步骤。
14、第六方面,本发明实施例还提供一种计算机程序产品,当所述计算机程序产品在计算机上运行时,使得所述计算机执行本发明实施例中任意一项所述的多传感器融合定位方法。
15、本发明实施例的有益效果在于:根据卫星定位数据,自动将城市全场景分为三类不同传感器的融合定位模式,同时根据融合定位结果,输出不同精度等级的定位状态,并实时监控融合定位系统各阶段的异常的方法。对整个系统各模块的异常检测,提升了自动驾驶车辆异常处理能力、安全性和稳定性,运用卫星定位数据状态切换不同的融合定位模式,实现了城市全场景下自动驾驶车辆的准确定位,提升自动驾驶车辆的定位能力,定位模式策略上的灵活性,进一步提升了自动驾驶车辆自动驾驶的安全性。同时提高了自动驾驶车辆的定位能力在城市多样性环境下的适应性,加快了自动驾驶车辆在城市环境下常规化运营的落地步伐。并且整体步骤简单易实现,逻辑清晰,对城市道路场景适应性良好,尤其是隧道、结构相似以及超大空旷等场景,满足了自动驾驶车辆对复杂且多样性的城市道路下高效、高精度的定位,确保了城市道路群场景下自动驾驶车辆高定位精度、高鲁棒性运行。
技术特征:
1.一种多传感器融合定位方法,应用于移动装置,包括:
2.根据权利要求1所述的方法,其特征在于,在所述确定多传感器中卫星定位传感器的卫星定位数据的质量等级之前,所述方法包括:
3.根据权利要求2所述的方法,其特征在于,在利用所述定位模式进行融合定位后,所述方法还包括:
4.根据权利要求2或3所述的方法,其特征在于,所述异常检测模式包括:检测多传感器中各传感器的数据是否异常、检测移动装置内存储的离线地图是否加载异常、检测激光数据的多帧激光匹配异常、检测从相机传感数据中提取的道路标识信息与所述离线地图中道路标识信息的多帧道路标识信息检测异常、融合定位结果异常。
5.根据权利要求1所述的方法,其特征在于,所述当使用第一定位模式时,利用卫星定位数据以及所述多传感器中的其他传感器的监测数据进行融合定位包括:
6.根据权利要求1所述的方法,其特征在于,所述当使用第二定位模式时,利用所述其他传感器的监测数据以及道路标识信息进行融合定位包括:
7.根据权利要求1所述的方法,其特征在于,所述当使用第三定位模式时,利用所述其他传感器的监测数据进行融合定位包括:
8.一种多传感器融合定位执行设备,包括:
9.一种电子设备,包括:至少一个处理器,以及与所述至少一个处理器通信连接的存储器,其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行权利要求1-7中任一项所述方法的步骤。
10.一种移动装置,包括本体以及安装在所述本体上的根据权利要求9所述的电子设备。
11.一种存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现权利要求1-7中任一项所述方法的步骤。
12.一种计算机程序产品,其特征在于,当所述计算机程序产品在计算机上运行时,使得所述计算机执行权利要求1-7任一项所述的多传感器融合定位方法。
技术总结
本发明实施例提供一种多传感器融合定位方法、设备、移动装置和存储介质。该方法包括:确定多传感器中卫星定位传感器的卫星定位数据的质量等级;基于卫星定位数据的质量等级确定待使用的定位模式;当使用第一定位模式时,利用卫星定位数据以及多传感器中的其他传感器的监测数据进行融合定位;当使用第二定位模式时,利用其他传感器的监测数据以及道路标识信息进行融合定位;当使用第三定位模式时,利用其他传感器的监测数据进行融合定位。本发明实施例实时监控融合定位系统各阶段的异常的方法。对整个系统各模块的异常检测,提升了自动驾驶车辆异常处理能力、安全性和稳定性,确保了城市道路群场景下自动驾驶车辆高定位精度、高鲁棒性运行。
技术研发人员:彭国旗
受保护的技术使用者:武汉智行者科技有限公司
技术研发日:
技术公布日:2024/4/8
- 还没有人留言评论。精彩留言会获得点赞!