一种铣削工件表面粗糙度的预测方法
1.本发明涉及铣削加工领域,具体涉及一种铣削工件的表面粗糙度预测方法。
背景技术:
2.随着制造业快速发展,在现代化生产加工过程中,针对铣削任一工件的加工标准不断提高,而工件的表面粗糙度是决定工件使用性能的关键因素。故对任一工件的表面粗糙度进行预测是当前迫切任务。为了增强表面粗糙度的预测能力,国内外大多数研究人员致力于相关方面的研究。近几年来,机器学习预测越来越受到广大学者的青睐,主要由于其在预测数据方面能力较强,而机器学习中用的最多的为人工神经网络预测方法。
3.然而,bp神经网络进行运算时,存在收敛性差、易陷入局部极小化等不足之处,虽然也有人采用一些算法优化bp神经网络对表面粗糙度进行预测,但运算时间较长,降低了运算速度,故需采用新型算法对表面粗糙度进行预测,提高预测精度和运算时间。
技术实现要素:
4.发明目的:
5.本发明提出一种改进的铣削工件表面粗糙度的预测方法,其目的主要是提出一种可以使工件的表面粗糙度在已知前提条件下进行快速预测的方法。利用 iterative混沌映射改进的北方苍鹰搜索算法对神经网络结构的初始权值和阈值进行全局寻优,克服神经网络的自身的不足之处,增强其预测能力和预测精度,并提到运算速度。
6.技术方案:
7.一种铣削工件表面粗糙度的预测方法,步骤为:
8.1)确定bp神经网络的拓扑结构,将数控机床铣削工件获得的实验数据以矩阵形式进行存储,在实验数据中,工艺参数作为bp神经网络的输入数据,表面粗糙度值作为输出数据;
9.2)对输入数据及输出数据通过归一化模型进行归一化处理;
10.3)根据参数数目模型确定bp神经网络所需寻优的权值和阈值的数目,并将权值和阈值数目映射成北方苍鹰位置,北方苍鹰所在的位置是一个向量;
11.4)设定北方苍鹰规模和迭代次数t,通过iterative混沌映射策略的初始位置变换模型生成北方苍鹰的初始种群位置,形成北方苍鹰种群位置矩阵x;
12.5)将步骤1)中的实验数据输入到bp神经网络模型中,计算初始权值与阈值下的神经网络预测值,将预测值与实测值之间的误差函数作为适应度函数f来计算北方苍鹰位置的适应度值;根据适应度值按升序排列,最小适应度值的北方苍鹰位置为猎物所在位置pi;
13.6)在步骤5)中确定当前猎物所在位置pi后,北方苍鹰向猎物靠近,并在靠近的过程中,通过猎物识别模型更新北方苍鹰位置并重新确定猎物位置;
14.7)猎物位置重新确定后,猎物位置适应度值发生改变,通过追逐猎物及猎物逃生模型更新猎物位置,更新后的北方苍鹰适应度值按升序排列,北方苍鹰适应度值最小的为
最终的猎物位置,同时满足迭代次数终止时,这时位于最终的猎物位置的北方苍鹰位置为优化后的权值与阈值;
15.8)利用步骤7)中优化后的权值与阈值代入bp神经网络结构进行训练,根据训练结果最终预测出不同工况下工件的表面粗糙度。
16.进一步的,步骤4)中iterative混沌映射的初始位置变换模型为:
[0017][0018]
式中,b为控制参数,取b为0.05,xi代表随机生成的[0,1]内j维向量的第i个初始个体。
[0019]
进一步的,步骤4)中北方苍鹰种群位置矩阵x为:
[0020][0021]
式中,x为北方苍鹰种群矩阵,xi为第i个北方苍鹰的位置,x
i,j
为第i个北方苍鹰的第j维的位置,n为北方苍鹰的种群数量,m为求解问题的维度。
[0022]
进一步的,步骤5)中北方苍鹰位置的适应度函数可以表示为:
[0023][0024]
式中,f为北方苍鹰种群的目标函数向量,fi为第i个北方苍鹰的目标函数值。进一步的,步骤5)中猎物所在位置pi为:
[0025][0026]
式中,pi为第i个北方苍鹰的猎物位置;k1是[1,n]范围内的随机整数;n为北方苍鹰的种群数量。
[0027]
进一步的,步骤6)中猎物识别模型:
[0028][0029]
[0030]
式中,pi为第i个北方苍鹰的猎物位置;为第i个北方苍鹰的猎物位置的适应度值;为猎物识别阶段更新后第i个北方苍鹰的新位置;为猎物识别阶段更新后第i个北方苍鹰的第j维的新位置;为基于猎物识别阶段更新后第i个北方苍鹰的适应度值;r
’1和r
’2是[0,1]范围内的随机数;i为1 或2的随机整数;
[0031]
其中,两种非线性因子表达式为:
[0032]r’1=d
·
(1-(t/t)
η
)
1/η
[0033][0034]
式中,η是调节系数,t是当前迭代次数,t是最大迭代次数,本文取η=1.5, d=0.05。
[0035]
进一步的,步骤7)中追逐猎物及猎物逃生模型为:
[0036][0037][0038]
式中,t为当前迭代次数,t为最大迭代次数。为追逐猎物及猎物逃生阶段更新后第i个北方苍鹰的新位置;为追逐猎物及猎物逃生阶段更新后第 i个北方苍鹰的第j维的新位置;为基于追逐猎物及猎物逃生阶段更新后第i个北方苍鹰的适应度值。
[0039]
优点效果:
[0040]
本方法通过对北方苍鹰算法进行改进,并采用改进后的北方苍鹰算法优化 bp神经网络。能够有效避免bp神经网络预测中存在的易陷入局部最优、收敛性差、易发生过拟合等缺点,并提高了在已知条件下预测出工件表面粗糙度的时间。将bp神经网络、ingo-bp以及ssa-bp预测方法得出的训练预测结果进行对比,利用平均误差率和运算时间作为衡量预测性能的评价指标,得出改进后的 ngo-bp训练结果的平均误差要小于ssa-bp和传统bp,预测精度更高并且运算时间更短。
附图说明
[0041]
图1(a)为ngo算法适应度曲线图;(b)为ingo算法适应度曲线图;
[0042]
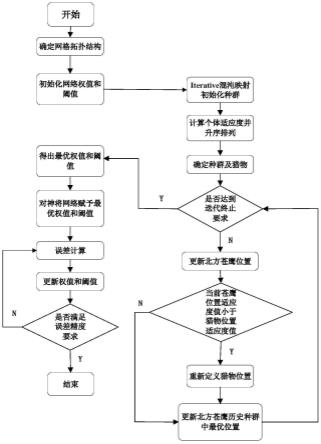
图2为ingo-bp算法流程图;
[0043]
图3为训练结果对比图;
[0044]
图4为测试数据训练结果对比图。
具体实施方式
[0045]
以下结合说明书附图更好的说明本发明。
[0046]
本发明为预测铣削加工后的工件表面粗糙度,意义在于通过表面质量预测研究,
预判出铣削工件时不同工艺参数组合所对应的表面粗糙度值,从而为选择合适的加工参数,得到理想工件表面粗糙度值提供保证。
[0047]
针对bp神经网络预测中存在的易陷入局部最优、收敛性差、易发生过拟合等缺点,并相对于采用一些算法优化的bp神经网络(比如麻雀算法),为了提高在已知条件下预测出工件表面粗糙度的运算时间。提出了基于改进北方苍鹰搜索方法优化bp神经网络的算法(ingo-bp),对bp神经网络的初始权值、阈值进行优化,提高铣削加工后工件表面粗糙度的预测精度及运算时间。
[0048]
北方苍鹰算法(ingo)中北方苍鹰觅食规律:
[0049]
1)北方苍鹰是鹰科的一个中大型猛禽,属于肉食性动物。北方苍鹰的捕猎策略包括两个阶段:第一阶段为猎物识别阶段,在识别出猎物后,它以高速向猎物移动攻击;第二阶段为追逐猎物及猎物逃生阶段,再追逐获取猎物。
[0050]
2)在猎物识别阶段,北方苍鹰在确定猎物目标后,纷纷向猎物靠拢,并进行攻击猎物。
[0051]
3)在追逐猎物及猎物逃生阶段,北方苍鹰攻击猎物后,猎物会试图逃跑。因此,在追逐猎物的收尾过程中,北方的苍鹰需要继续追逐猎物。由于北方苍鹰的追击速度很高,它们几乎可以在任何情况下追逐猎物,并最终捕获猎物。
[0052]
本发明中的bp神经网络结合改进的北方苍鹰算法的原理为:
[0053]
根据输入数据与输出数据确定神经网络的输入节点数、输出节点数和隐含层节点数,从而确定bp神经网络的结构,对输入数据与输出数据通过归一化模型进行归一化,并将归一化之后的输入数据和输出数据分别作为bp神经网络结构的输入p与输出t,根据参数数目模型确定bp神经网络中初始权值和阈值的数目,并将其映射成北方苍鹰位置。设定北方苍鹰规模和迭代次数,通过iterative 混沌映射策略对北方苍鹰种群进行初始化,形成北方苍鹰种群位置矩阵x,然后计算初始该权值与阈值下的神经网络预测值,将预测值与实测值之间的误差函数作为适应度函数f,根据北方苍鹰搜索方法中北方苍鹰的觅食规则,计算北方苍鹰位置的适应度值并按升序排列,将最小适应度值的北方苍鹰位置作为猎物位置,通过对猎物攻击及追逐不断更新北方苍鹰及猎物位置。满足迭代次数终止时,更新后的北方苍鹰位置适应度值按升序排列,最小适应度值的北方苍鹰位置即为最终的猎物位置,这时位于猎物处的北方苍鹰位置即为优化后的权值与阈值。利用优化后bp神经网络的权值与阈值代入bp神经网络进行训练,根据训练结果最终预测出不同工况下工件的表面粗糙度值。
[0054]
如图2所示,本发明涉及的一种数控机床铣削工件表面粗糙度的预测方法具体步骤包括:
[0055]
1)确定bp神经网络的拓扑结构,将数控机床铣削工件获得的实验数据以矩阵形式进行存储,在实验数据中,工艺参数作为bp神经网络的输入数据,表面粗糙度值作为输出数据;
[0056]
取训练样本个数占总样本个数的百分之85%,测试样本个数占总样本数据个数的15%。
[0057]
将工艺参数(以铣削螺杆转子为例,工艺参数包括主轴转速,间歇进给量,加工倍率等)作为bp神经网络的输入数据,表面粗糙度值作为输出数据,将数据存储于矩阵形式。
根据输入矩阵的维数m,确定输入层神经元数目为m,根据输出矩阵的维数n确定输出层神经元数目n。并根据隐含层神经元模型确定其隐含层神经元数目,隐含层神经元模型为:
[0058][0059]
式中k为隐层神经元个数,m为输入层神经元个数,n为输出层神经元个数,α是常数,取值[1,10];
[0060]
3)对输入数据及输出数据通过归一化模型进行归一化处理;
[0061]
归一化模型为:
[0062][0063]
其中,公式中y为归一化后的数据,x
min
为样本数据最小值,x
max
为样本数据最大值。
[0064]
样本归一化之后的输入数据和输出数据分别作为ingo-bp的输入数据p与输出数据t。
[0065]
3)根据参数数目模型确定bp神经网络所需寻优的权值和阈值的数目,并将权值和阈值数目映射成北方苍鹰位置,北方苍鹰所在的位置是一个向量;
[0066]
网络中参数数目模型为:
[0067]
j=k(m+n+1)+n
[0068]
其中,j为寻优参数(权值和阈值)数目,k为隐含层神经元数量,m为输入层神经元数量,n为输出层神经元数量。将所需寻优的参数取上限1,下限0,限制于[0,1]之间。
[0069]
4)设定北方苍鹰规模和迭代次数t(可根据任一实验条件设定),通过iterative 混沌映射策略的初始位置变换模型生成北方苍鹰的初始种群位置,形成北方苍鹰种群位置矩阵x;
[0070]
北方苍鹰种群采用iterative混沌映射的初始位置变换模型为:
[0071][0072]
式中,b为控制参数,取b为0.05。xi代表随机生成的[0,1]内j维向量的第i个初始个体。
[0073]
初始化种群过程如下;
[0074]
首先随机生成一个[0,1]内的j维向量作为初始个体,再将初始个体代入式 (1.1)对每一维迭代并生成i-1个新的北方苍鹰个体,最后将全部北方苍鹰个体映射到变量取值范围内生成北方苍鹰的种群位置矩阵。采用iterative混沌映射生成的初始种群具有多样性丰富的特点,并能够在解空间中均匀分布,以便防止算法过早收敛易陷入局部最优,提高算法的寻优效率。
[0075]
北方苍鹰种群位置矩阵x为:
[0076][0077]
式中,x为北方苍鹰种群矩阵,xi为第i个北方苍鹰的位置,x
i,j
为第i个北方苍鹰的第j维的位置,n为北方苍鹰的种群数量,m为求解问题的维度。
[0078]
5)将步骤1)中的实验数据输入到bp神经网络模型中,计算初始权值与阈值下的神经网络预测值,将预测值与实测值之间的误差函数作为适应度函数f来计算北方苍鹰位置的适应度值;根据适应度值按升序排列,最小适应度值的北方苍鹰位置为猎物所在位置pi;
[0079]
北方苍鹰位置的适应度函数可以表示为:
[0080][0081]
式中,f为北方苍鹰种群的目标函数向量,fi为第i个北方苍鹰的目标函数值。猎物所在位置pi具体描述如公式(3)所示:
[0082][0083]
式中,pi为第i个北方苍鹰的猎物位置;k1是[1,n]范围内的随机整数;n为北方苍鹰的种群数量。
[0084]
6)在步骤5)中确定当前猎物所在位置pi后,北方苍鹰向猎物靠近,并在靠近的过程中,通过猎物识别模型更新北方苍鹰位置并重新确定猎物位置;
[0085]
在北方苍鹰靠近猎物时,引入非线性因子更新北方苍鹰的位置;在猎物识别阶段结束时,当该阶段更新后的第i个北方苍鹰的适应度值小于猎物位置的适应度值时,则更新猎物位置,将当前第i个北方苍鹰位置作为新的猎物位置,反之,若该阶段更新后的第i个北方苍鹰位置的适应度值大于或等于猎物位置的适应度值时,则保持原先猎物位置不变。
[0086]
猎物识别模型描述如下:
[0087][0088][0089]
式中,pi为第i个北方苍鹰的猎物位置;为第i个北方苍鹰的猎物位置的适应度值;为猎物识别阶段更新后第i个北方苍鹰的新位置;为猎物识别阶段更新后
第i个北方苍鹰的第j维的新位置;为基于猎物识别阶段更新后第i个北方苍鹰的适应度值;r是[0,1]范围内的随机数;i为1或2 的随机整数。
[0090]
其中,两种非线性因子表达式为:
[0091]r’1=d
·
(1-(t/t)
η
)
1/η
[0092][0093]
式中,η是调节系数,是当前迭代次数,t是最大迭代次数,本文取η=1.5, d=0.05。
[0094]
由于加入非线性因子r
′1、r
′2,因此这一阶段增加了ngo算法的全局搜索能力。提高了北方苍鹰算法在猎物识别阶段的全局寻优效果。
[0095]
8)猎物位置重新确定后,猎物位置适应度值发生改变,通过追逐猎物及猎物逃生模型更新猎物位置,更新后的北方苍鹰适应度值按升序排列,北方苍鹰适应度值最小的为最终的猎物位置,同时满足迭代次数终止时,这时位于最终的猎物位置的北方苍鹰位置为优化后的权值与阈值。
[0096]
在猎物识别阶段后,由于猎物在受到攻击后,会进行逃跑,北方苍鹰则进行追击,此时,猎物位置适应度值发生改变,随着每一次更新迭代,重新判断北方苍鹰当前位置适应度值和当前猎物位置适应度值,当达到迭代要求后,输出的北方苍鹰位置即为bp神经网络的最优权值和阈值;
[0097]
在北方苍鹰追逐猎物及猎物逃生阶段,若在该阶段更新后的第i个北方苍鹰位置适应度值小于当前猎物位置适应度值,则更新猎物位置,将当前第i个北方苍鹰位置作为新的猎物位置,反之,若在该阶段更新后的第i个北方苍鹰位置的适应度值大于或等于猎物位置的适应度值时,则保持当前猎物位置不变。继续进行迭代更新。
[0098]
追逐猎物及猎物逃生模型描述如下:
[0099][0100][0101][0102]
式中,t为当前迭代次数,t为最大迭代次数。为追逐猎物及猎物逃生阶段更新后第i个北方苍鹰的新位置;为追逐猎物及猎物逃生阶段更新后第 i个北方苍鹰的第j维的新位置;为基于追逐猎物及猎物逃生阶段更新后第i个北方苍鹰的适应度值。
[0103]
9)利用步骤8)中优化后的权值与阈值代入bp神经网络结构进行训练,根据训练结果最终预测出不同工况下工件的表面粗糙度。
[0104]
为了体现改进后的北方苍鹰算法(ingo)比原始北方苍鹰算法(ngo)更具有优越性,利用目标函数进行f1验证。f1表达式如式(1.3)
[0105][0106]
设置最大迭代次数为100,运算结果如图2所示,图1(a)为原始北方苍鹰算法 (ngo)的运算结果,ngo算法在第18次迭代时开始收敛,在给定参数范围内,收敛最小值为5.149e-15。图1(b)为改进后的北方苍鹰算法(ingo)的运算结果,ingo算法在第4次迭代时已经收敛,在给定参数范围内,收敛最小值为 4.0852e-36。可看出改进后的北方苍鹰算法比原始北方苍鹰算法在收敛时对应的迭代次数更小,并且改进后的北方苍鹰算法收敛最小值小于原始北方苍鹰算法的最小值,故改进后的北方苍鹰算法收敛速度更快,收敛精度更高。
[0107]
实施例1
[0108]
采用螺杆专用铣床为加工设备,进行螺杆转子铣削表面粗糙度预测的实验任务。在铣削螺杆转子过程中,影响螺杆转子表面粗糙度的因素有机床主轴转速v、间歇进给量fn、加工倍率q等。将机床主轴转速v、间歇进给量fn、加工倍率q 作为输入,输出为表面粗糙度值。
[0109]
(1)将不同工况实验数据整理如表1所示:
[0110]
表1实验数据
[0111]
[0112][0113]
(2)输入p维数为3,所以确定输入层单元个数为3;输出t为一维,所以确定输出层单元格数为1。隐层神经元个数为5,初始化种群个体的数量i=20,设定最大迭代次数maxgen=30,设定训练集所占比例为85%。
[0114]
(3)由设定的参数与实验结果,利用改进的北方苍鹰搜索算法优化bp神经网络,并根据优化后的网络对其进行训练,将训练结果与原始bp神经网络和 ssa-bp神经网络对照,如图4所示,预测误差具体值如表2所示。
[0115]
表2三种方法预测结果误差对比
[0116]
[0117][0118]
根据图3及表2可知,bp神经网络、ssa-bp神经网络与本文提出的 ingo-bp算法均能对螺杆转子铣削过程中表面粗糙度值进行预测。其中,表4 中数据为初始实验粗糙度数
据以及3种预测方法的预测粗糙度数值,误差值为 3种方法分别于原数据比较的误差值。其中文中提出的改进bp神经网络算法的平均预测误差为3.2%,低于ssa-bp的3.751%以及经典bp的4.665%。因此,本文提出的ingo-bp方法预测精度更高,预测效果更好。
[0119]
(4)将实验结果的后8组数据作为验证模型预测精度的测试数据,以对应的参数作为输入,并根据ingo-bp方法进行预测,与原实验数据进行对比。对比图如图4所示,预测误差具体值如表3所示。
[0120]
表3三种方法测试数据预测结果误差对比
[0121][0122]
根据图4和表3可得,平均误差最小的为ingo-bp的6.8%,其次是ssa-bp,误差值为10.625%,最后是经典bp网络的误差值为17.803%。在运算时间上,相同条件下,采用ingo-bp的运算时间为32秒,采用ssa-bp的运算时间为 38秒,由此可知,本文采用改进的神经网络算法可对铣削螺杆转子过程中表面粗糙度能够精确并且快速预测。
[0123]
综上,本方法可以使工件表面粗糙度在给定条件下进行快速预测,且提高预测表面粗糙度准确性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1