一种基于光强度的波片延迟量及快轴测量方法与流程
1.本发明涉及波片延迟量及快轴测量方法,具体涉及一种基于光强度的波片延迟量及快轴测量方法。
背景技术:
2.波片在现代偏光技术和激光应用技术领域被广泛应用,是偏振光学领域重要的光学元器件,对波片自身精度的掌握将影响到整个实验或者应用的测量精度。波片相位延迟的测量方法有很多种,如椭偏测量、干涉测量以及矩阵测量法等等,一般的波片测量方法都基于如下思想:已知进入波片前光的偏振状态和波片的光轴方位,测量通过波片后光的偏振状态,反推出波片的延迟量。
3.现有技术首先要求光轴角度已知,虽然波片在安装时会粗略标记光轴方向,但精度非常有限;其次对出射光偏振态的获取需要准确判定出出射光两极值的大小,尤其是在探测极小值时通常信噪比较小,信号获取精度有限。而椭偏方法在短波波段面对多级波片测量时存在光难以穿透导致椭偏参数的测量精度问题。
技术实现要素:
4.针对波片延迟量及快轴现有测量中所存在的问题,本技术提供一种基于光强度的波片延迟量及快轴测量方法。采用光强度式测量方案,避免了对某一角度下光强度具体值的获取,转而采用曲线拟合的方式进行参数求值;且随着采集信号数目的增多,本技术可实现非常高精度的波片参数测量。
5.本发明技术方案如下:
6.本发明提供一种基于光强度的波片延迟量及快轴测量方法,包括步骤:
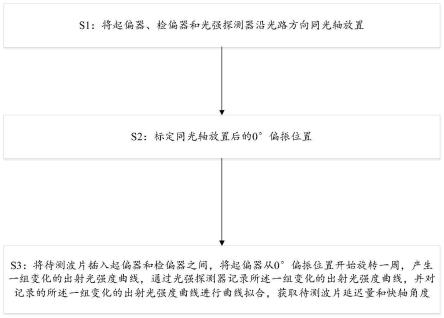
7.将起偏器、检偏器和光强探测器沿光路方向同光轴放置;
8.标定同光轴放置后的0
°
偏振位置;
9.将待测波片插入起偏器和检偏器之间,将起偏器从0
°
偏振位置开始旋转一周,产生一组变化的出射光强度曲线,通过光强探测器记录所述一组变化的出射光强度曲线,并对记录的所述一组变化的出射光强度曲线进行曲线拟合,获取待测波片延迟量和快轴角度。
10.进一步优选的,所述标定同光轴放置后的0
°
偏振位置,具体包括步骤:保持起偏器、检偏器和光强探测器的位置不变,将起偏器旋转一周,记录出射光强度随起偏器旋转一周所产生的出射光强度曲线,对所述出射光强度曲线进行拟合,将出射光强度曲线的峰值位置设为检偏器的透射方向,并将所述峰值标定为0
°
偏振位置。
11.进一步优选的,所述出射光强度曲线的表达式为:
12.i
out
=i
in
[1+(cos22θ+sin22θcosδ)cos 2x+sin 2θcos 2θ(1-cosδ)sin 2x];
[0013]
其中,i
out
为出射光强度,i
in
为入射光强度,δ为波片延迟量,θ为快轴角度,x为起偏器与x轴之间的夹角,i
in
、δ和θ均为未知参数。
[0014]
进一步优选的,所述起偏器的入射光源为退偏光。
[0015]
依据上述实施例的波片延迟量及快轴测量方法,由于采用光强度式测量方案,避免了对某一角度下光强度具体值的获取,转而采用曲线拟合的方式进行参数求值;且随着采集信号数目的增多,本技术可实现非常高精度的波片参数测量。
附图说明
[0016]
图1为波片延迟量及快轴测量方法原理图;
[0017]
图2为波片延迟量及快轴测量方法流程图。
具体实施方式
[0018]
下面通过具体实施方式结合附图对本发明作进一步详细说明。
[0019]
波片是能使互相垂直的两光振动间产生附加光程差(或相位差)的光学器件。对波片延迟量及快轴角度的测量非常重要,目前的波片延迟量及快轴角度的测量方案的基本思想是:已知进入波片前光的偏振状态和波片的光轴方位,测量通过波片后光的偏振状态,反推出波片的延迟量。该测量方案首先要求光轴角度已知,虽然波片在安装时会粗略标记光轴方向,但精度非常有限;其次对出射光偏振态的获取需要准确判定出出射光两极值的大小,尤其是在探测极小值时通常信噪比较小,信号获取精度有限。进一步,目前的波片延迟量及快轴角度的测量方案是独立于实况单独测量的,并不是在实况中测量,这使得测量的波片延迟量及快轴角度在实况应用中会存在偏差。
[0020]
本技术提供的基于光强度的波片延迟量及快轴测量方法,采用光强度式测量方案,因此,可以在实际工况中对波片延迟量及快轴进行测量,无需将波片独立于实际工况测量,例如,可以将波片放置于实际的光路中进行延迟量及快轴测量,不需要将波片放置于测试台中进行延迟量及快轴测量,这样就可以避免波片基于测试台测量的延迟量及快轴与实际光路中的应用存在偏差的情况发生。进一步,采用曲线拟合的方式进行参数求值;且随着采集信号数目的增多,本技术可实现非常高精度的波片参数测量。
[0021]
下面对本技术提供的基于光强度的波片延迟量及快轴测量方法的实现方案进行详细描述。
[0022]
在本技术中采用起偏器1、检偏器3和光强探测器4实现波片2的迟量及快轴测量,测量原理图如图1所示,测量步骤如下,测量流程图如图2所示。
[0023]
s1:将起偏器、检偏器和光强探测器沿光路方向同光轴放置。
[0024]
其中,起偏器的入射光源为退偏光,即起偏器转至任意角度输出光强度不变。
[0025]
s2:标定同光轴放置后的0
°
偏振位置。
[0026]
具体的,在步骤s1的基础上,保持起偏器、检偏器和光强探测器的位置不变,将起偏器旋转一周,记录出射光强度随起偏器旋转一周所产生的出射光强度曲线,对所述出射光强度曲线进行拟合,将出射光强度曲线的峰值位置设为检偏器的透射方向,并将所述峰值标定为0
°
偏振位置。
[0027]
s3:将待测波片插入起偏器和检偏器之间,将起偏器从0
°
偏振位置开始旋转一周,产生一组变化的出射光强度曲线,通过光强探测器记录所述一组变化的出射光强度曲线,并对记录的所述一组变化的出射光强度曲线进行曲线拟合,获取待测波片延迟量和快轴角
度。
[0028]
退偏光在经过高精度转台控制的可旋转起偏器后获得任意角度的强度不变的高纯度线偏光,经波片对偏振态调制后又通过检偏器出射,并最终为光强探测器所接收。
[0029]
其中,出射光强度曲线表达式的获取方式如下:
[0030]
设起偏器与x轴呈x
°
,经起偏器之后的入射光可i
in
用矩阵表示为:
[0031][0032]
快轴角度为θ,波片的相位延迟量为δ的波片p的穆勒矩阵为:
[0033][0034]
消光比为p、透光轴角度为α检偏器a的穆勒矩阵为:
[0035][0036]
则此处理想检偏器穆勒矩阵可表示为
[0037][0038]
通过a.p.i
in
,则出射光强度i
out
可表示为:
[0039]iout
=i
in
[1+(cos22θ+sin22θcosδ)cos 2x+sin 2θcos 2θ(1-cosδ)sin 2x];
[0040]
其中,i
out
为出射光强度,i
in
为入射光强度,δ为波片延迟量,θ为快轴角度,x为起偏器与x轴之间的夹角,i
in
、δ和θ均为未知参数。
[0041]
本技术提供的技术方案通过旋转起偏器获得出射光强度曲线,对曲线拟合获取波片延迟量和快轴角度。采用光强度式测量方案,避免了对某一角度下光强度具体值的获取,而采用曲线拟合的方式进行参数求值;且随着采集信号数目的增多,本技术可实现非常高精度的波片参数测量。其中,关于曲线拟合的方法是现有比较成熟的技术,本技术不作具体赘述。
[0042]
以上应用了具体个例对本发明进行阐述,只是用于帮助理解本发明,并不用以限制本发明。对于本发明所属技术领域的技术人员,依据本发明的思想,还可以做出若干简单推演、变形或替换。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1