一种智能型无人测绘装置及方法
1.本发明属于智能测绘技术领域,特别是涉及一种智能型无人测绘装置及方法。
背景技术:
2.智慧城市已经成为推进全球城镇化、提升城市治理水平、破解大城市病、提高公共服务质量、发展数字经济的战略选择。智慧城市的建设需要大量的测绘数据作为支撑,同时对测绘数据获取的实时性和精准性提出了更高的要求。传统的测绘技术受限制于人工与成本等因素,数据采集的实时性较低,实时控制仪器进行测绘作业的难度较大,实时在线高精度数据处理的自动化程度不高,特别是对于一些具有重复性、周期性的测绘工作(如矿山变形监测)会耗费大量人力、物力、财力,因此将传统的人工测绘转变为无人测绘、智能测绘已成为测绘科学与技术领域的重点研究方向。
3.因此,设计一种具备续航能力强、成本低,能够实现全自动智能无人测绘的智能型无人测绘装置,具有重要的意义。
技术实现要素:
4.本发明的目的是提供一种智能型无人测绘装置及方法,以解决上述现有技术存在的问题。
5.为实现上述目的,本发明提供了一种智能型无人测绘装置,包括:
6.定位模块,用于确定目标测绘点位置;
7.测量模块,用于对目标测绘点进行测量;
8.六自由度并联平台模块,用于对目标测绘点进行自动整平和对中;
9.电源模块,用于为测绘装置供电;
10.云服务器模块,用于发布测绘指令,并实时显示测绘结果;
11.信息处理中枢模块,与所述定位模块、测量模块、六自由度并联平台模块、电源模块、云服务器模块分别连接并进行实时通讯与信息处理。
12.可选的,所述信息处理中枢模块,用于基于信息处理中枢处理测绘数据;
13.所述信息处理中枢配有cpu加速单元,用于部署若干种数据模型,并运行若干种视觉处理加速算法。
14.可选的,所述定位模块采用yolov5框架,并搭载激光雷达、深度摄像头、工业摄像头;
15.所述yolov5框架,用于定位道路位置和障碍物位置,规划到达目标测绘点位置的行走路径;
16.所述激光雷达,用于规避所述行走路径中的障碍物;
17.所述深度摄像头、工业摄像头,用于实时自主导航至所述目标测绘点位置。
18.可选的,所述测量模块包括,
19.测量单元,用于基于北斗高精度定位板卡对所述目标测绘点进行测量;
20.定位单元,用于基于全球导航卫星系统对所述目标测绘点进行自主导航定位。
21.可选的,所述六自由度并联平台包括若干根电动推杆、惯性导航芯片和高清摄像头;
22.所述电动推杆搭载光电编码器,用于支撑所述六自由度并联平台;
23.所述惯性导航芯片,用于获取所述六自由度并联平台的位置与姿态信息;
24.所述高清摄像头,用于捕捉与锁定所述目标测绘点位置。
25.可选的,所述电源模块采用分体式结构,用于为六自由度并联平台电源、装置底盘电源、测绘供电电源分别供电。
26.可选的,所述云服务器模块支持若干种数据传输与通信协议,所述数据传输与通信协议包括但不限于tcp/ip、ftp、mqtt、ntrip。
27.可选的,所述云服务器模块包括,
28.传输单元,用于基于ftp协议将测绘装置获得的原始卫星观测数据与在线解算数据回传至所述云服务器模块;
29.指令发布单元,用于基于mqtt协议给测绘装置发布测绘指令,并将所述测绘装置的实时位置以及各个模块的实时状态信息回传至所述云服务器模块。
30.本发明还提供了一种智能型无人测绘方法,包括以下步骤:
31.对摄像头电机、六自由度并联平台、装置位置进行校准;
32.云服务器向信息处理中枢发布测绘指令和目标测绘点位置信息;
33.所述信息处理中枢获取装置坐标,基于所述装置坐标与目标测绘点位置信息的差值获得前进路径,并前往所述目标测绘点;
34.基于所述六自由度并联平台对所述目标测绘点进行自动整平和对中,并对所述目标测绘点进行全球导航卫星系统静态测量、实时差分定位测量、标准单点定位测量、精密单点定位测量,获得测量数据并上传至所述云服务器。
35.可选的,前往所述目标测绘点的过程包括,采用激光雷达规避所述前进路径中的障碍物,并采用深度摄像头与工业摄像头进行实时自主导航至所述目标测绘点。
36.本发明的技术效果为:
37.本发明公开了一种智能型无人测绘装置,搭载了北斗/gnss、激光雷达、深度相机、工业摄像机、imu等传感器,通过5g通讯技术进行数据传输,云服务器进行数据在线储存与处理,实现了测绘装置室内外导航定位、无人高精度测绘等任务,提高了重复性、周期性测绘工作智能化水平,对助力智能测绘,加快智慧城市建设具有重要的意义。
38.本发明的测绘装置具有续航能力强、成本低、全自动智能无人测绘、实时高精度测绘、模块化集成、通讯稳定、可在线解算观测数据、适配多种处理算法、适应复杂测绘环境与任务的优点,可为智慧城市建设、地质灾害监测预警等对测绘质量与测绘实时性有高要求的领域提供一定的技术保障。
附图说明
39.构成本技术的一部分的附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
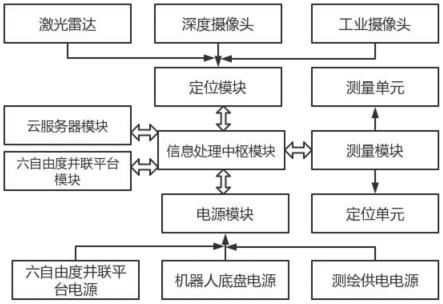
40.图1为本发明实施例一中的测绘装置硬件设备示意图;
41.图2为本发明实施例二中的测绘机器人硬件设备示意图;
42.图3为本发明实施例二中的测绘机器人工作流程图。
具体实施方式
43.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
44.需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。
45.实施例一
46.如图1所示,本实施例提供了一种智能型无人测绘装置,包括:定位模块,用于确定目标测绘点位置;测量模块,用于对目标测绘点进行测量;六自由度并联平台模块,用于对目标测绘点进行自动整平和对中;电源模块,用于为测绘装置供电;云服务器模块,用于发布测绘指令,并实时显示测绘结果;信息处理中枢模块,与定位模块、测量模块、六自由度并联平台模块、电源模块、云服务器模块分别连接并进行实时通讯与信息处理。
47.可实施的,信息处理中枢模块,用于基于信息处理中枢处理测绘数据;信息处理中枢配有cpu加速单元,用于部署若干种数据模型,并运行若干种视觉处理加速算法。
48.可实施的,定位模块采用yolov5框架,并搭载激光雷达、深度摄像头、工业摄像头;yolov5框架,用于定位道路位置和障碍物位置,规划到达目标测绘点位置的行走路径;激光雷达,用于规避行走路径中的障碍物;深度摄像头、工业摄像头,用于实时自主导航至目标测绘点位置。
49.可实施的,测量模块包括,测量单元,用于基于北斗高精度定位板卡对目标测绘点进行测量;定位单元,用于基于全球导航卫星系统对目标测绘点进行自主导航定位。
50.可实施的,六自由度并联平台包括若干根电动推杆、惯性导航芯片和高清摄像头;电动推杆搭载光电编码器,用于支撑六自由度并联平台;惯性导航芯片,用于获取六自由度并联平台的位置信息;高清摄像头,用于捕捉与锁定目标测绘点位置。
51.可实施的,电源模块采用分体式结构,用于为六自由度并联平台电源、装置底盘电源、测绘供电电源分别供电。
52.可实施的,云服务器模块支持若干种数据传输与通信协议,数据传输与通信协议包括但不限于tcp/ip、ftp、mqtt、ntrip。
53.可实施的,云服务器模块包括,传输单元,用于基于ftp协议将测绘装置获得的原始卫星观测数据与在线解算数据回传至云服务器模块;指令发布单元,用于基于mqtt协议给测绘装置发布测绘指令,并将测绘装置的实时位置以及各个模块的实时状态信息回传至云服务器模块。
54.本实施例还提供了一种智能型无人测绘方法,包括以下步骤:对摄像头电机、六自由度并联平台、装置位置进行校准;云服务器向信息处理中枢发布测绘指令和目标测绘点位置信息;信息处理中枢获取装置坐标,基于装置坐标与目标测绘点位置信息的差值获得前进路径,并前往目标测绘点;基于六自由度并联平台对目标测绘点进行自动整平和对中,并对目标测绘点进行全球导航卫星系统静态测量、实时差分定位测量、标准单点定位测量、
精密单点定位测量,获得测量数据并上传至云服务器。
55.可实施的,前往目标测绘点的过程包括,采用激光雷达规避前进路径中的障碍物,并采用深度摄像头与工业摄像头进行实时自主导航至目标测绘点。
56.实施例二
57.如图2、3所示,如图2所示为一种智能型无人测绘机器人硬件设备图,图3为测绘机器人工作流程图。该测绘装置包括机器人信息处理中枢模块、slam模块、gnss模块、六自由度并联平台模块、机器人电源模块、云服务器模块。
58.机器人信息处理中枢模块,是机器人的核心,用于与其他模块通讯,各种信息与数据的处理;云服务器通过5g网络模块向机器人发送指令后,机器人通过信息中枢模块接收并处理指令,并对应的将指令传输给下位机,下位机通过各部分驱动获取反馈信息,再将该信息反馈给信息中枢,信息中枢根据服务器需要,有选择的将机器人各部分状态信息发送给服务器。
59.进一步的,机器人信息处理中枢模块,以jetson nx为数据处理中枢,其处理数据快,数据吞吐能力强,且配有gpu加速功能,边缘部署能力强,可以方便的部署多种视觉模型,并运行多种视觉处理加速算法;兼容多种卫星导航定位算法、slam算法,视觉目标检测算法,并配有多路io口,方便与下位机进行实时通讯,并使用移远rm500u-cn 5g通讯模块与云服务器进行实时通讯。
60.slam模块,包含rplidar a1激光雷达、inter d435i深度摄像头、迈德威视mv-sua630c工业摄像头,能够实现机器人对室内外周围环境的感知、行走路径的最优规划与自主导航。
61.进一步的,slam模块用于机器人室内外自主导航定位,测绘点位寻找;使用inter d435i深度摄像头作为影像的输入端,使用orb-slam算法对机器人自身位姿进行估计并进行slam导航,slam地图初始化的目标是构建初始的三维点云。使用迈德威视mv-sua630c工业摄像头作为影像的输入端,使用yolov5框架寻找并定位道路位置与障碍物等位置,以此实现在前往测绘点既定位置时的自动寻路与自动避障功能。同时,在既定测绘点附近寻找准确测绘点,以及最终的对中整平任务均由yolov5框架实现。rplidar a1激光雷达,将环境数据转换为点云数据,利用其进行避障。
62.gnss模块用于机器人室外自主导航定位,测绘点位高精度测量;
63.进一步的,在本实施例中,gnss模块,包含华测b380板卡与neo m8t gnss模块,前者用于测绘点位高精度测量,后者与slam模块共同用于机器人自动导航定位;对b380板卡进行配置,信息中枢对其发送接收数据指令,b380板卡将二进制gnss原始数据发送至信息中枢后进行解码,接着进行gnss静态测量或rtk测量或单点定位;通过neo-m8t gnss模块获取gnss信号,在ros(机器人操作系统)下获取当前位置经纬度值,启动gps_goal之后,机器人便会在终端输出计算结果并调用move_base前往目标测绘点。由于机器人自身的控制精准度以及gnss存在信号波动等多种因素影响,使得实际操作时机器人到达位置与实际位置存在较大误差,为了解决此问题,获取将当前视觉数据和惯性导航数据获取的经纬度值与目标测绘点经纬度值之间的差值,并以此差值为约束条件,使小车不断逼近目标测绘点。
64.进一步的,华测b380板卡是三星八频(bds b1/b2/b3、gps l1/l2/l5、glonass l1/l2)北斗高精度定位板卡,面向高精度定位、定向、授时等应用领域,可提供厘米级的rtk定
位和毫米级载波观测值;b380板卡板载有两路高速lv-ttl uart及一路高速rs-232uart接口,本实施例选用板载高速rs-232uart接口与jetson nx连接。neo-m8t gnss模块能够进行精密单点定位、实时rtk、实时rtd和单点定位等四种模式gnss定位测量,可观测的卫星类型为gps、glonass和bds。
65.六自由度并联平台模块用于gnss设备的自动整平和对中;该平台选用六根具有光电编码器的电动推杆作为整个平台的支撑,选用12个万向轴承分别连接平台的下底座与上平台,在上平台上安装惯性导航芯片以确定平台所处位置,同时在平台的正下方安装高清摄像头,用于捕捉与锁定测绘点位置。该六自由度并联平台具有承载能力强、刚度大、精度高、动态响应快和累积误差小等特点,保证了测绘中整平对中的精度。
66.进一步的,六自由度并联平台模块,可以实现机器人对测绘点位自动进行高精度的对中整平,该平台上部安装了mpu9250惯性导航芯片与高清摄像头,六组推杆安装了光电编码器,其平移精度可达0.1mm,旋转精度可达1”,可实现测绘点位的完全自动化与无人化测绘。
67.机器人电源模块用于给机器人提供动力和其他模块供电;采用分体式结构,其六自由度并联平台电源、机器人底盘电源、测绘供电电源三个部分没有集成在一起,这样的设计可以实现三个部分完全独立供电,避免了机器人单独某部分在不使用的情况下造成的电能浪费,从而大大提高了机器人的续航能力。其中,底盘驱动电调采用32位定制电机驱动芯片,使用磁场定向控制(foc)技术,实现对电机转矩的精确控制,与m3508直流无刷减速电机搭配,组成强大的动力套件。可配合上位机调参软件进行参数设置并升级固件,底盘采用6个独立动力组进行驱动,保证动力强劲,且能保证在部分电机损坏的情况下,底盘仍能进行正常工作,月球车式悬挂为机器人提供了良好的越障能力,对于高度较小的楼梯等地形也能平稳通过,底盘推杆悬挂可以保证机器人在陡坡上仍能保持自身平衡。
68.云服务器模块用于下达服务器指令,在线存储、处理测绘数据,实时显示测绘结果。采用阿里云服务器,利用5g通讯模块与其进行连接,支持tcp/ip、ftp、mqtt、ntrip等多种数据传输与通信协议,传输数据稳定可靠,便于机器人自主导航与实时测绘时保持与服务器良好通讯,并将相关数据上传至服务器进行储存与处理。其中,在服务器端搭建ftp服务器,使用ftp协议将机器人所获得的原始卫星观测数据与在线解算数据回传至服务器;通过搭建mqtt服务器,并在服务器端用结构体的方式规定机器人与服务器通讯的指令协议,来给机器人发布测绘的相关指令,同时,机器人在前往测绘点过程中的实时位置与机器人各个传感器的实时状态信息也可依靠mqtt协议实时进行回传。
69.一种智能型无人测绘机器人的运行方法,包括以下步骤:
70.1)开机自校准
71.将机器人信息中枢电源打开,并关闭后舱盖,此时机器人中枢开机;将用于自动驾驶的gnss天线竖起,并将机器人侧舱盖打开后开启总电源,此时尾灯以20赫兹频率闪烁两秒,代表开始进行开机自校准:(1)开始校准摄像头电机,摄像头保护舱盖自动打开,电机将摄像头观测杆自动拉升至指定位置,摄像头旋转一百八十度并转回初始位置,确保周围没有遮挡的物体,此时摄像头电机校准完成;(2)开始校准六自由度并联平台,平台首先将六组电机回归至初始位置,随即进行z轴校准,通过惯性导航芯片监视平台是否水平来确定电机是否正常工作,随即依次校准三个不同方向的电机,通过惯性导航芯片测量平台倾斜位
置与既定位置的差值来确定三个方向的电机是否正常工作,平台校准完成;(3)开始校准车体位置,通过车体后的两根推杆悬挂可以使车体与底盘保持一定的角度,首先将推杆回归至初始位置,在车载惯性导航芯片的指引下,车身自动校准到水平位置,开机自校准完成。
72.2)自动驾驶
73.机器人在待机情况下,通过云服务器将测绘指令和目标测绘点坐标位置等相关信息由5g通讯模块传输至机器人信息中枢,此时信息中枢通过gnss主动获取当前自身坐标,计算当前自身坐标与目标测绘点坐标的差值,通过电子地图进行路径规划,生成一系列的路径目标点,目标点通过move-base框架传达给下位机,下位机驱动机器人前往目标点,途中机器人使用激光雷达进行避障,并使用深度摄像头与工业摄像头进行实时自主导航至目标测绘点。
74.3)自动整平对中
75.当到达目标测绘点附近之后,机器人运行六自由度平台下的摄像头,并利用yolov5框架识别测绘点位置,并将自身移动到测绘点正上方,通过六自由度平台与惯性导航模块实现对测绘点的对中与gnss接收机的整平。
76.4)智能测绘
77.在上述步骤完成之后,使用高精度gnss接收机进行gnss静态、rtk、标准单点定位(spp)、精密单点定位(ppp)等测量工作,并通过5g网络模块将gnss原始观测数据或解算数据上传至服务器进行储存或进一步处理,完成一个点位的测绘工作后等待服务器下达进一步测绘或结束测绘指令。
78.本实施例公开的一种智能型无人测绘机器人,以轮式机器人为平台,搭载北斗/gnss、激光雷达、深度相机、工业摄像机、imu等传感器,通过5g通讯技术进行数据传输,云服务器进行数据在线储存与处理,实现了测绘机器人室内外导航定位、无人高精度测绘等任务,提高了重复性、周期性测绘工作智能化水平,为助力智能测绘,加快智慧城市建设提供了一定的技术保障。
79.以上所述,仅为本技术较佳的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1