一种土壤温室气体排放的数据采集系统及其设备的制作方法
1.本发明属于土壤检测技术领域,尤其涉及一种土壤温室气体排放的数据采集系统及其设备。
背景技术:
2.土壤是地球上第二大碳库,对全球气候变暖有举足轻重的决定性作用。当前,对土壤温室气体的检测主要是利用静态动态箱式法等采集单位时间内土壤表层的温室气体浓度,再利用实验室的气相色谱法等进行量化分析。通量塔等方法可检测一定空间内、大尺度的温室气体浓度。遥感等方式也可以用于大规模预测近年来,有些基于激光等无损检测温室气体通过气流量的小体积传感器也被应用于温室大棚环境检测。
3.然而,对于环境中温室气体的检测无法断定温室气体的产生源,例如,温室大棚中的二氧化碳可能来自于土壤微生物呼吸,也有可能是植物的呼吸作用;同时,土壤的空间异质性强,利用空间中静止的传感器检测温室气体浓度或单位时间内的气流量,都无法反映出不同地点的土壤温室气体排放的不同。
技术实现要素:
4.基于背景技术存在的技术问题,本发明提出了一种土壤温室气体排放的数据采集系统及其设备。
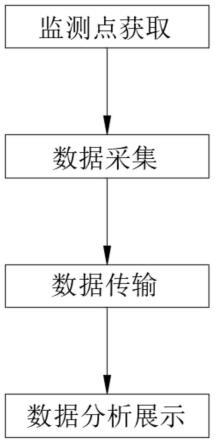
5.本发明提出的一种土壤温室气体排放的数据采集系统,包括以下步骤:
6.s1:监测点获取,智能移动设备利用自动导航系统实现监测点的覆盖,将智能移动设备移动至检测点,智能移动设备根据航线运动、识别并人工定位适合检测的地点,也可以在航线上相距一定距离设置一个检测点,检测点的gps定位将同步记录;
7.s2:数据采集,智能移动设备到达检测点后,智能移动设备上的机械臂抬起、既而放下,使密封箱置于土壤表面,然后机械臂进行按压动作,将一定的力施加于密封箱上,使其紧扣土壤,同时机械臂上的计时器根据机械臂的按压动作开始计时,测定箱内指定时段内的温室气体的浓度变化,根据箱口面积、箱体积和时间,即可计算出每种温室气体的净排放速率和通量;
8.s3:数据传输,利用物联网无线传输技术将传感器所测得的数据和数据采集时刻上传到云平台,通过数据上传模式将数据上传至云品台,后续,云端数据可被用户终端访问;
9.s4:数据后台处理展示,根据pc机访问云端得到的检测数据,构建数字土壤展示平台,每一种温室气体通过一个图层展示,每个图层上利用颜色展示数据分布,结合图例可分析每种温室气体的排放热点,点击特定位置即可获取该位置的温室气体排放情况,从而综合展示、分析土壤温室气体的空间分布,数据获取后,将数据实时展示在数字土壤多图层展示平台,综合土地利用方式、土壤管理模式以及土壤性状分布的影响因子,为后续的土壤管理提供决策性依据,实现细化区域、因地制宜的目的。
10.优选地,所述数据上传模式包括两种方式:第一种方式是根据自定义的时间周期发送数据;第二种方式是根据传感器的数据量、检测量发送数据;其中第一种方式的时间周期和第二种方式的数据量均根据检测需求和检测密度进行预设自定义。
11.本发明还提供一种自动导航系统,应用于所述的一种土壤温室气体排放的数据采集方法中的智能移动设备,包括:
12.1)图像预处理,将双目相机搭载在智能移动设备上,实时采集图像,图像采集后,同步传到后台,用matlab或fiji作为图像处理软件根据需求和图像质量对摄像头采集的rgb图像进行相应的图像除噪、亮度提高、图像锐化等预处理;
13.2)采用hsi模型确定颜色阈值,帮助分割植被、秸秆和土壤图像;
14.3)采用otsu算法确定分割阈值,对可行驶区域及障碍物进行分割,图像分割后可识别不同物体,识别物体是后续制定导航路线的前提基础,图像处理后,以绕过物体位置、尽可能地涵盖目标检测点为原则制定导航路线;
15.4)根据图像特征和目标背景的对比度,对比、评价边缘检测算子,即roberts算子、prewitt算子、sobel算子和canny算子的边缘检测效果,选取合适的算子,提取障碍物的边界;
16.5)利用hough算法拟合障碍物边界,可采用提取roi的方式减少要处理的边缘点数量,找到导航特征点,不同障碍物的边缘坐标的中点,结合roi中的最大连通域,利用最小二乘法拟合导航线;
17.6)在实地跟随导航线前进的过程中,利用红外探测器对出现的大型生物进行导航线调整;
18.7)根据实际情况反馈,对导航线进行实时调整。
19.本发明还提供一种土壤温室气体排放的数据采集设备,包括智能移动设备和密封箱,所述智能移动设备与密封箱之间设置有机械臂,所述密封箱的内壁上固定安装有传感器,所述机械臂包括依次转动连接在一起的主轴、大臂和小臂,所述主轴的一端与智能移动设备转动连接,所述小臂远离大臂的一端与密封箱转动连接,其中所述主轴的一侧安装有计时器,所述机械臂上设置有驱动机构。
20.优选地,所述驱动机构包括伸缩电机、第一电推杆和第二电推杆,所述智能移动设备上固定安装有固定板,所述伸缩电机固定安装在固定板上,所述伸缩电机的驱动端与主轴的一侧转动连接,所述第一电推杆转动安装在主轴上,所述第一电推杆的驱动端固定连接有第一驱动轴,所述第一驱动轴远离第一电推杆的一端与大臂转动连接,所述第二电推杆与大臂转动连接,所述第二电推杆的驱动端固定连接有第二驱动轴,所述第二驱动轴远离第二电推杆的一端与小臂转动连接。
21.优选地,所述小臂远离大臂的一端固定安装有球形块,所述球形块的表面套接有安装套,所述安装套与密封箱固定连接。
22.优选地,所述机械臂的工作范围为800-1200mm,所述机械臂的材料为韧性强、强度大、热膨胀系数小、蠕变小、密度小的碳纤维复合材料;所述主轴的工作角度为360
°
,所述大臂的工作角度范围为180
°
,所述第一电推杆行程为500-800mm,所述小臂的工作角度范围为180
°
,所述第二电推杆行程为300-500mm。
23.优选地,所述传感器终端连接在20cm
×
20cm的五面由惰性塑料构成,且一面空面
向下的密封箱内顶上,所述密封箱由6mm厚的pvc泡沫绝缘材料构成,其外部用镀铝涤纶膜包裹。
24.与现有技术相比,本发明的有益效果是:
25.1、本方案将土壤箱式法和传感器法相结合、加以创新形成的一个可以用于原位检测不同地点的土壤温室气体的采集设备,该采集设备不仅可避免费力费时的人工采样,实现对土壤温室气体排放的便捷检测和评估,还可绘制土壤温室气体排放热点的分布,为后续基于区域差异性的土壤生态环境治理提供了理论依据和指导建议;
26.2、可实现原位检测土壤温室气体排放状况,避免了实验室繁琐的检测工作,操作便捷,首先智能移动设备可基于自动导航系统的技术算法实现自动航线设计、根据实时情况灵活调整从而到达不同检测点,其次通过机械臂的动作为计时器传输信号,进而控制每一个检测点的检测时间,同时,利用机械臂,避免了繁琐的田间箱氏法检测土壤温室气体排放;
27.3、数据实时、快捷存储和处理,数据实时上传云端,通过云平台和云计算使后台同步得到数据,数据结果可视化展示,通过平台展示土壤温室气体排放的热点分布,为土壤管理提供决策性建议。
附图说明
28.图1为本发明提出的一种土壤温室气体排放的数据采集方法的流程示意图;
29.图2为检测数据上传云端、用户终端访问示意图;
30.图3为土壤二氧化碳排放展示平台;
31.图4为本发明提出的一种土壤温室气体排放的数据采集设备的侧面结构示意图;
32.图5为本发明提出的一种土壤温室气体排放的数据采集设备的底部结构示意图;
33.图6为图4中a处的结构示意图。
34.图中:1智能移动设备、2主轴、3大臂、4小臂、5密封箱、6传感器、7固定板、8伸缩电机、9第一电推杆、10第一驱动轴、11第二电推杆、12第二驱动轴、13计时器、14安装套、15球形块。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
36.实施例一:参照图1-6,一种土壤温室气体排放的数据采集系统,包括以下步骤:
37.s1:监测点获取,智能移动设备1利用自动导航系统实现监测点的覆盖,将智能移动设1备移动至检测点,根据检测目的,智能移动设备1根据航线运动、识别并人工定位适合检测的地点,其中智能移动设备1可为农机或者无人机,例如植物行中点、空旷地带、侵蚀严重地点等,也可以在航线上相距一定距离设置一个检测点,例如每隔10m检测一次,检测点的gps定位将同步记录。
38.其中智能移动设备1中设置了一种自动导航系统,利用自动导航系统使得智能移动设备1实现检测点的覆盖,包括:
39.1)图像预处理,将双目相机搭载在农机或无人机上,实时采集图像,图像采集后,
同步传到后台,用matlab或fiji作为图像处理软件根据需求和图像质量对摄像头采集的rgb图像进行相应的图像除噪、亮度提高、图像锐化等预处理;
40.2)采用hsi模型确定颜色阈值,帮助分割植被、秸秆和土壤图像;
41.3)采用otsu算法确定分割阈值,对可行驶区域及障碍物进行分割,图像分割后可识别不同物体,例如植物种植行、树木、大石块等,,识别物体是后续制定导航路线的前提基础,图像处理后,以绕过物体位置、尽可能地涵盖目标检测点为原则制定导航路线;
42.4)根据图像特征和目标背景的对比度,对比、评价边缘检测算子,即roberts算子、prewitt算子、sobel算子和canny算子的边缘检测效果,选取合适的算子,提取障碍物的边界,例如植物种植行、大石块等;
43.5)利用hough算法拟合障碍物边界,可采用提取roi的方式减少要处理的边缘点数量,找到导航特征点,不同障碍物的边缘坐标的中点,结合roi中的最大连通域,利用最小二乘法拟合导航线;
44.6)在实地跟随导航线前进的过程中,利用红外探测器对出现的大型生物进行导航线调整;
45.7)根据实际情况反馈,对导航线进行实时调整。
46.s2:数据采集,到达检测点后,机械臂抬起、既而放下,使密封箱5置于土壤表面,然后机械臂进行按压动作,将一定的力施加于密封箱5上,使其紧扣土壤,同时机械臂上的计时器13根据机械臂的按压动作开始计时,测定箱内指定时段内的温室气体的浓度变化,根据箱口面积、箱体积和时间,即可计算出每种温室气体的净排放速率和通量,检测时长可根据土壤利用方式、地况、检测目标对象和检测目的设定,本设备可选择范围为1-10分钟,计时到指定时间点后,机械臂施加于密封箱5上的力消失,同时停止计时,传感器6数据采集完成;
47.s3:数据传输,利用物联网无线传输技术将传感器6所测得的数据和数据采集时刻上传到云平台,其中数据上传模式包括两种方式:第一种方式为根据自定义的时间周期发送数据,例如每隔一小时上传一次数据;第二种方式为根据传感器6的数据量/检测量发送数据,例如每检测100个点,发送一次数据;其中第一种方式的时间周期和第二种方式的数据量均根据检测需求和检测密度进行预设自定义;后续,云端数据可被用户终端访问。
48.s4:数据后台处理展示,根据pc机访问云端得到的检测数据,构建数字土壤展示平台,每一种温室气体通过一个图层展示,每个图层上利用颜色展示数据分布,结合图例可分析每种温室气体的排放热点,点击特定位置即可获取该位置的温室气体排放情况,从而综合展示、分析土壤温室气体的空间分布;数据获取后,将数据实时展示在数字土壤多图层展示平台,综合土地利用方式、土壤管理模式以及土壤性状分布的影响因子,为后续的土壤管理提供决策性依据,实现细化区域、因地制宜的目的。
49.实施例二:一种土壤温室气体排放的数据采集方法,应用于所述土壤温室气体排放的数据采集系统以及数据采集云平台,所述数据采集云平台与至少一个物联传感网络通信连接,所述物联传感网络包括物联关系数据库,所述物联关系数据库用于存储物联网数据包,所述方法包括:
50.当获取到所述物联传感网络上传的物联网数据包时,对所述物联网数据包进行解析,得到第一物联数据关系网,所述第一物联数据关系网包括多个第一数据簇网结;
51.获取所述第一物联数据关系网的第一关系网描述向量和所述第一物联数据关系网中多个第一数据簇网结的第一数据簇网结描述向量;其中,所述第一数据簇网结为所述物联网数据包中的数据簇信息对应的网结,所述第一物联数据关系网为基于所述多个第一数据簇网结之间的牵涉情况而建立;
52.对所述第一关系网描述向量和所述多个第一数据簇网结描述向量进行处理,确定所述第一物联数据关系网中每个第一数据簇网结对应的数据显著因子;其中,所述数据显著因子表征所述第一数据簇网结在所述第一物联数据关系网中的代表性信息;
53.基于获取的多个数据显著因子,在所述多个第一数据簇网结中确定出多个第二数据簇网结,所述多个第二数据簇网结对应的数据显著因子大于其余所述第一数据簇网结对应的数据显著因子;
54.对所述多个第二数据簇网结的第一数据簇网结描述向量和第二物联数据关系网的第二关系网描述向量进行抽取,确定所述物联网数据包的存储归类信息;其中,所述第二物联数据关系网为基于所述多个第二数据簇网结之间的牵涉情况而建立。
55.所述基于获取的多个数据显著因子,在所述多个第一数据簇网结中确定出多个第二数据簇网结的步骤后,所述方法还包括:
56.基于所述第二关系网描述向量对所述多个第二数据簇网结的第一数据簇网结描述向量进行修正,获得所述多个第二数据簇网结的第二数据簇网结描述向量;
57.对所述第二关系网描述向量和多个第二数据簇网结描述向量进行处理,确定所述第二物联数据关系网中每个第二数据簇网结的数据显著因子;
58.基于获取的多个数据显著因子,在所述多个第二数据簇网结中确定出多个第三数据簇网结,所述多个第三数据簇网结对应的数据显著因子大于其余所述第二数据簇网结对应的数据显著因子。
59.本实施例通过关系网描述向量和数据簇网结描述向量以获取各个第一数据簇网结的数据显著因子,涵盖更丰富的参考信息,获得的数据显著因子可以充分体现数据簇网结在物联数据关系网中的代表性,使得后续基于参考数据显著因子,对各个第一数据簇网结进行挑选的过程中,可以精确确定出具有代表性的数据簇网结,基于获取到的具有代表性的数据簇网结的数据簇网结描述向量和关系网描述向量对物联网数据包进行分析提炼,增加了数据归类的准确性且对于代表性差的数据簇网结不纳入分析范畴,使得整个存储归类流程的效率得到有效提升,从而提高了土壤温室气体排放的数据采集效率。
60.实施例三:参照图4-6,一种土壤温室气体排放的数据采集设备,包括智能移动设备1和密封箱5,智能移动设备1与密封箱5之间设置有机械臂,密封箱5的内壁上固定安装有传感器6,机械臂包括依次转动连接在一起的主轴2、大臂3和小臂4,主轴2的一端与智能移动设备1转动连接,小臂4远离大臂3的一端与密封箱5转动连接,其中主轴2的一侧安装有计时器13,机械臂上设置有驱动机构;
61.驱动机构包括伸缩电机8、第一电推杆9和第二电推杆11,智能移动设备1上固定安装有固定板7,伸缩电机8固定安装在固定板7上,伸缩电机8的驱动端与主轴2的一侧转动连接,第一电推杆9转动安装在主轴2上,第一电推杆9的驱动端固定连接有第一驱动轴10,第一驱动轴10远离第一电推杆9的一端与大臂3转动连接,第二电推杆11与大臂3转动连接,第二电推杆11的驱动端固定连接有第二驱动轴12,第二驱动轴12远离第二电推杆11的一端与
小臂4转动连接;小臂4远离大臂3的一端固定安装有球形块15,球形块15的表面套接有安装套14,安装套14与密封箱5固定连接。
62.工作人员将智能移动设备1移动至需要监测点,启动驱动机构,伸缩电机8通过驱动端的伸缩实现主轴2相对智能移动设备1的转动,第一电推杆9通过第一驱动轴10实现主轴2相对大臂3的转动,第二电推杆11通过第二驱动轴12实现小臂4相对大臂3的转动,从而将密封箱5扣在土壤上,小臂4与密封箱5之间通过球形块15、安装套14连接,安装套14套在球形块15的球形表面上实现两者小臂4相对密封箱5的转动,能够有效的适应土壤表面。
63.机械臂的工作范围为800-1200mm,优选1000mm,主轴2的工作角度为360
°
,大臂3的工作角度范围180
°
,第一电推杆9行程为500-800mm,优选600mm,小臂4的工作角度范围180
°
,第二电推杆11行程为300-500mm,优选400mm,密封箱5固定在小臂4的末端;由于密封箱5重量不大,机械臂所用材料为韧性强、强度大、热膨胀系数小、蠕变小、密度小的碳纤维复合材料;为控制检测时间,机械臂上安装一个计时器13,可根据机械臂的行为(触碰到土壤表层、从土壤表层离开)来决定开始和结束计时的时刻、以控制检测时长;
64.密封箱5通过机械臂与智能移动设备1相连接。如果检测对象是农田,可根据田间作业的需求选取不同功能的农机,例如旋耕机、播种机、收割机等,用于检测土壤在一定作业时间内的温室气体排放情况。如果检测对象是果园、森林等,农机穿梭不够便捷,可利用低空旋翼无人机,任何智能移动设备1只要结合机械臂或连杆结构、可使得机械臂连接的箱式容器达到土壤表层并覆盖以实现检测均可。
65.本发明使用的智能移动设备1内置基于机器视觉的自动导航系统,可实现自动定位、规划路径行走等,还可自动识别障碍物,例如大石块、坡体、水坑、中大型动物等,通过自动导航功能,智能移动设备1可到规定样点采集数据或者随时记录数据采集点的空间地理位置。
66.本发明中的传感器6利用非分散式近红外传感终端检测温室气体,任何体积重量合适的、基于自由扩散式气体检测方法的传感器6都可用于本设备,将传感器6终端连接在20cm
×
20cm的五面由惰性塑料构成,其中一面空面向下的密封箱5的内顶上(如图5),密封箱5由6mm厚的pvc泡沫绝缘材料构成,其外部用镀铝涤纶膜包裹、旨在反射太阳辐射减少加热效应,密封箱5也可自行选用对测定气体有惰性的材料,其中密封箱5对内部的土壤与植物性状没有明显影响为佳。
67.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1