激光焊缝检测用超声导波探头随动耦合及姿态调节装置
1.本发明涉及焊接过程控制领域,特别涉及搭接激光焊缝在线超声检测与评估技术领域,尤指一种激光焊缝检测用超声导波探头随动耦合及姿态调节装置。
背景技术:
2.近年来,随着汽车、轨道客车等制造领域对薄板焊接部件质量及生产效率要求的不断提高,激光焊工艺以其高效、小变形等优势而得以广泛应用。但是,激光焊工艺对工件的组对间隙、装夹精度等条件要求较高,否则极易造成未熔透、成型不良等质量问题。因此,激光焊过程的在线监测,尤其是熔透状态监测问题一直是焊接工作者关注的热点,同时也是汽车、轨道客车等制造领域亟需解决的重点问题。
3.目前,搭接激光焊缝的超声无损检测一般采用焊后检测的方式进行。此方法虽然可实现焊接质量的无损检测与评价,但在检测效率上仍然存在不足。为进一步降低检验耗时、提升焊接生产效率,焊接过程中的实时超声检测成为解决这一需求的重要途径。
技术实现要素:
4.本发明的目的在于提供一种激光焊缝检测用超声导波探头随动耦合及姿态调节装置,旨在解决焊接过程超声实时检测技术中探头与工件的可靠性耦合问题。本发明针对现阶段薄板搭接激光焊接工艺的实际特点,实现焊接过程中超声探头随激光头同步运动,同时保证探头与工件表面的良好耦合,并可以实现超声入射角度的自动调节功能,以满足不同模态超声导波的激励与接收,从而实现激光焊接过程中焊缝熔透状态的实时检测。
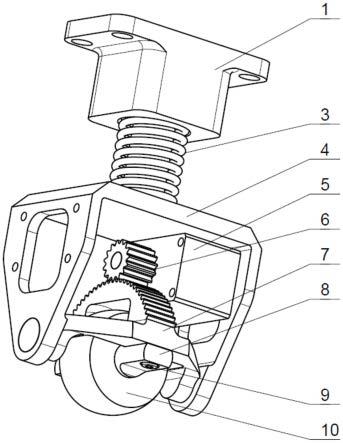
5.本发明的上述目的通过以下技术方案实现:激光焊缝检测用超声导波探头随动耦合及姿态调节装置,该装置旨在实现激光焊接过程中超声探头与被检工件的压紧、同步运动及随动耦合、超声入射角度的自动调节功能。装置具有垂直于工件表面的直线移动、平行于工件表面并沿焊接方向的滚动、平行于工件表面并以沿焊接方向为轴线的翻转3个调节自由度,同时满足超声探头与工件表面的垂向压紧、滚动耦合及探头角度倾摆需求;包括连接座1、直线轴承2、压紧弹簧3、保持架4、步进电机5、驱动齿轮6、翻转架7、滚动芯轴8、紧固螺钉9、柔性耦合轮10及超声压电晶体11,装置采用紧固螺钉9通过连接座1的法兰安装固定在激光焊接设备的运动机构上,装置整体随激光焊接头同步移动;所述连接座1通过压紧弹簧3、保持架4、翻转架7、滚动芯轴8、柔性耦合轮10将压紧力传递至工件表面,保证柔性耦合轮10与工件表面良好贴合,可随着焊接过程向前连续滚动;柔性耦合轮10始终与工件表面贴合在一起,为其内部的超声压电晶体11与被测工件提供超声耦合通路。
6.所述的连接座1与保持架4之间通过直线轴承2实现垂向相对移动,压紧弹簧3套在保持架4上且位于连接座1与保持架4之间,通过保持架4提供指向工件表面的压紧力;保持架4下端设置有旋转定位孔,翻转架7轴线与旋转定位孔轴线同轴安装;步进电机5安装在保持架4上,其轴端安装有驱动齿轮6;驱动齿轮6与翻转架7上方的外齿啮合,可驱动翻转架7
沿其轴线左右旋转;滚动芯轴8固定在翻转架7下方,且轴线与翻转架7轴线呈90度十字交叉布置;超声压电晶体11镶嵌于滚动芯轴8中部,超声发射方向垂直于滚动芯轴8轴线并向下指向工件表面;滚动芯轴8中部安装有柔性耦合轮10,超声压电晶体11包裹在柔性耦合轮10内部;在同步运动过程中,柔性耦合轮10沿滚动芯轴8轴线转动,其踏面始终与工件表面贴合,从而实现超声压电晶体11与被测工件之间的声波耦合。
7.装置可独立或成对使用,独立使用进行自发自收式的超声导波检测;成对使用进行一发一收式的超声导波检测。不同的使用方式,其工作原理及调节方法相同,可以满足不同检测对象的空间结构需求。
8.本发明的另一目的在于提供一种激光焊缝检测用超声导波探头随动耦合及姿态调节方法,在激光焊接过程中,装置通过连接座1与激光头保持同步运动,柔性耦合轮10与工件表面良好贴合,并随着焊接过程向前连续滚动;步进电机5通过驱动齿轮6调节翻转架7相对于保持架4的翻转角度,带动滚动芯轴8、超声压电晶体11相对于工件表面产生固定角度的倾斜;上位控制主机设定好所需超声导波模态后,向装置发送调节指令;步进电机5驱动翻转架7从负极限角度位置到正极限角度位置按照固定的步距角逐步转动,在每个步距角位置收发一次超声导波,当接收到的导波信号与设定模态相同时自动停止角度调节,并锁定此角度进行后续的焊缝检测。
9.本发明的有益效果在于:针对搭接激光焊缝在线超声检测的实际要求,本发明通过柔性滚动耦合、自适应姿态调节等机械结构的设计,实现了激光焊接过程中超声探头与焊接装备的同步运动以及与被测工件的连续耦合、角度调节,极大提升超声波无损检测技术的效率。
附图说明
10.此处所说明的附图用来提供对本发明的进一步理解,构成本技术的一部分,本发明的示意性实例及其说明用于解释本发明,并不构成对本发明的不当限定。
11.图1为本发明的超声导波探头随动耦合及姿态调节装置立体结构示意图;图2为本发明的超声导波探头随动耦合及姿态调节装置剖视结构示意图;图3为本发明的超声导波探头随动耦合及姿态调节装置工作示意图;图4、图5为本发明的激光焊熔深超声导波检测模式示意图;图6为本发明的激光焊熔深超声导波检测工作方式示意图;图7为本发明的超声导波模态调节方式示意图;图8为本发明的0
°
入射超声导波模态检测信号;图9为本发明的15
°
入射超声导波模态检测信号;图10为本发明的30
°
入射超声导波模态检测信号。
12.图中:1、连接座;2、直线轴承;3、压紧弹簧;4、保持架;5、步进电机;6、驱动齿轮;7、翻转架;8、滚动芯轴;9、紧固螺钉;10、柔性耦合轮;11、超声压电晶体。
具体实施方式
13.下面将结合附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,
本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
14.参见图1至图10所示,本发明的激光焊缝检测用超声导波探头随动耦合及姿态调节装置与调节方法,用于搭接激光焊熔透状态在线超声导波检测。针对现阶段薄板搭接激光焊接工艺的实际特点,实现焊接过程中超声探头随激光头同步运动,同时保证探头与工件表面的良好耦合,并可以实现超声入射角度的自动调节功能,以满足不同模态超声导波的激励与接收,从而实现激光焊接过程中焊缝熔透状态的实时检测,达到提升焊接质量在线无损效率的目的。
15.参见图1至图3所示,本发明的激光焊缝检测用超声导波探头随动耦合及姿态调节装置,是由连接座1、直线轴承2、压紧弹簧3、保持架4、步进电机5、驱动齿轮6、翻转架7、滚动芯轴8、紧固螺钉9、柔性耦合轮10及超声压电晶体11构成。整套装置具有垂直于工件表面的直线移动、平行于工件表面并沿焊接方向的滚动、平行于工件表面并以沿焊接方向为轴线的翻转3个调节自由度,同时满足超声探头与工件表面的垂向压紧、滚动耦合及探头角度倾摆需求。
16.参见图3至图5所示,本装置采用紧固螺钉通过连接座1的法兰安装固定在激光焊接设备的运动机构上,整套装置随激光焊接头同步运动。连接座1通过压紧弹簧3、保持架4、翻转架7、滚动芯轴8、柔性耦合轮10将压紧力传递至工件表面,保证柔性耦合轮10与工件表面良好贴合,可随着焊接过程向前连续滚动;柔性耦合轮10始终与工件表面贴合在一起,为其内部的超声压电晶体11与被测工件提供超声耦合通路。装置可独立使用,进行自发自收式的超声导波检测;也可以成对使用,进行一发一收式的超声导波检测。不同的使用方式,其工作原理及调节方法相同,可以满足不同检测对象的空间结构需求。
17.参见图6所示,本发明的激光焊缝检测用超声导波探头随动耦合及姿态调节方法是:在激光焊接过程中,装置通过连接座1与激光头保持同步运动;压紧弹簧3通过保持架4、翻转架7、滚动芯轴8、柔性耦合轮10将压紧力传递至工件表面,保证柔性耦合轮10与工件表面良好贴合,并随着焊接过程向前连续滚动;步进电机5通过驱动齿轮6调节翻转架7与保持架4的相对角度,带动滚动芯轴8、超声压电晶体11相对于工件表面产生固定角度的倾斜,从而实现超声入射角度的调节。在每次焊缝随动检测之前进行超声入射角度调节,采用自动匹配的方式进行。上位控制主机设定好所需超声导波模态后,向装置发送调节指令;步进电机5驱动翻转架7从负极限角度位置到正极限角度位置按照固定的步距角逐步转动,在每个步距角位置收发一次超声导波,当接收到的导波信号与设定模态相同时自动停止角度调节,并锁定此角度进行后续的焊缝检测。
18.激光焊缝在线检测时,激光焊缝检测用超声导波探头随动耦合及姿态调节装置位于激光焊缝的一侧(自发自收)或两侧(一发一收)。随着激光焊接过程的进行,装置的柔性耦合轮10始终与工件表面贴合在一起,为其内部的超声压电晶体11与被测工件提供超声耦合通路。在任一检测位置,超声压电晶体11所激发的超声波通过柔性耦合轮10进入工件内部并形成特定模态的超声导波;超声导波沿板材传播至激光焊缝区域,产生反射及透射现象;当采用自发自收工作模式时,反射波沿原路径返回至激发探头,当采用一发一收工作模式时,透射波越过焊缝继续向前传播至接收探头,从而实现超声导波信号的激励与接收。
19.参见图7所示,根据检测需求,步进电机5通过驱动齿轮6调节翻转架7相对于保持架4的翻转角度,带动滚动芯轴8、超声压电晶体11相对于工件表面产生固定角度的倾斜,以满足不同超声入射角度条件下特定超声模态的调节需求。
20.实施例1:下面以轨道客车车体部件用半熔透型搭接激光焊缝检测为例进行说明:(1)、柔性耦合轮直径φ40mm,最大垂向压缩量10mm;翻转架最大倾摆角度
±
30
°
,步进电机步距角1.5
°
,齿轮传动比1:10;超声压电晶体尺寸6mm
×
6mm,中心频率10mhz,焦深12mm;超声收发重复频率1khz;激光焊工件上层板厚2mm,激光焊接速度100mm/s。
21.(2)、激光焊接过程中,超声探头以1khz的重复频率连续激励超声波,在100mm/s的焊接速度工艺条件下,可实现每0.1mm焊缝长度上一次超声导波的收发检测。根据检测需要,翻转架可实现-30
°
~+30
°
的角度调节,根据所述的步进电机步距角及齿轮传动比,最小调节角度0.15
°
,可以满足超声导波模态的精铣微调。如图8至图10所示,在0
°
、15
°
、30
°
入射角度条件下,可获得具有不同模态的超声导波信号,从而满足不同检测需求。
22.在本实例所述的正常使用条件下,本装置可满足激光焊接过程中高频、连续、模态可调的超声导波在线检测需求,极大提升焊接检验及生产效率。
23.以上所述仅为本发明的优选实例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡对本发明所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1