可移动原子干涉重力仪水平加速运动误差补偿方法和装置
1.本发明涉及原子干涉精密测量技术领域,尤其涉及一种可移动原子干涉重力仪水平加速运动误差补偿方法和装置。
背景技术:
2.原子干涉重力仪可以通过激光操控重力场中的冷原子团进行干涉,从而实现对重力加速度的精确测量,由于冷原子具备德布罗意波长短、自由演化时间长、较大的静态质量、极小的速度分布、稳定的内部结构和能级分布、无机械摩擦等特点,因此,基于冷原子能够实现高灵敏度、高精度、无长时漂移的重力测量。目前,原子干涉重力仪的测量性能已经逼近甚至超越经典重力仪,正在向着小型化、可移动的方向发展,并且已经出现商用化产品,具备极其广阔的发展前景。
3.可移动原子干涉重力仪预期实现载体平台移动过程中的动态重力测量,是量子重力仪的重要应用方向,但也面临着载体复杂运动引入的动态误差影响。现有技术大量关注竖直方向振动、重力仪姿态旋转等因素的作用,提出了相应的振动隔离、振动补偿、姿态稳定等技术方案,但对水平加速运动影响的处理较少。而从理论分析和实验验证可知,受载体平台功能任务、路径规划要求、运动控制精度、水平振动等限制,运动载体很难一直保持水平匀速,对于其上搭载的原子干涉重力仪,加速运动将导致原子团在激光截面内的相对位置变化,导致测量精度下降。
4.因此,如何提高原子干涉重力仪的测量精度的问题是目前业界亟待解决的重要课题。
技术实现要素:
5.本发明提供一种可移动原子干涉重力仪水平加速运动误差补偿方法和装置,用以解决现有技术中存在的问题,提高原子干涉重力仪的测量精度。
6.本发明提供一种可移动原子干涉重力仪水平加速运动误差补偿方法,所述方法包括:
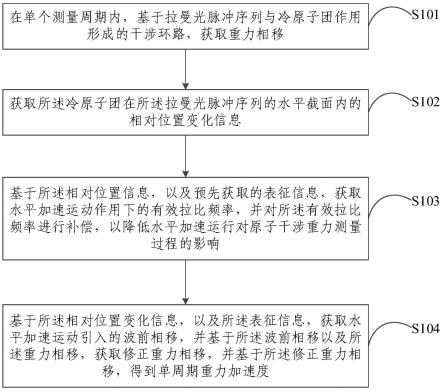
7.在单个测量周期内,基于拉曼光脉冲序列与冷原子团作用形成的干涉环路,获取重力相移,其中,所述拉曼光脉冲序列包括多次拉曼光脉冲;
8.获取所述冷原子团在所述拉曼光脉冲序列的水平截面内的相对位置变化信息,其中,所述相对位置变化信息包括与多次所述拉曼光脉冲分别对应的相对位置信息;
9.基于所述相对位置信息,以及预先获取的表征信息,获取水平加速运动作用下的有效拉比频率,并对所述有效拉比频率进行补偿,以降低水平加速运行对原子干涉重力测量过程的影响,其中,所述表征信息包括拉曼光的光强分布、拉曼光的波前分布、所述冷原子团的初始密度分布以及横向温度;
10.基于所述相对位置变化信息,以及所述表征信息,获取水平加速运动引入的波前相移,并基于所述波前相移以及所述重力相移,获取修正重力相移,并基于所述修正重力相
移,得到单周期重力加速度。
11.根据本发明提供的一种可移动原子干涉重力仪水平加速运动误差补偿方法,所述获取所述冷原子团在各个所述拉曼光脉冲的水平截面内的相对位置变化信息的步骤,包括:
12.获取原子干涉重力仪的水平加速运动的信息;
13.基于所述水平加速运动的信息,获取相对位置变化信息。
14.根据本发明提供的一种可移动原子干涉重力仪水平加速运动误差补偿方法,所述基于所述相对位置信息,以及预先获取的表征信息,获取水平加速运动作用下的有效拉比频率,并对所述有效拉比频率进行补偿的步骤,包括:
15.针对每次拉曼光脉冲与所述冷原子团作用的时刻,基于该次拉曼光脉冲对应的相对位置信息,以及所述表征信息,获取当前水平加速运动作用下的当前有效拉比频率;
16.基于所述当前有效拉比频率,对该次拉曼光脉冲进行调节,补偿所述当前有效拉比频率,以降低水平加速运行对原子干涉重力测量过程的影响。
17.根据本发明提供的一种可移动原子干涉重力仪水平加速运动误差补偿方法,所述对该次拉曼光脉冲进行调节的步骤,包括:
18.调节该次拉曼光脉冲对应的拉曼光的光强;或,
19.调节该次拉曼光脉冲的脉冲宽度。
20.根据本发明提供的一种可移动原子干涉重力仪水平加速运动误差补偿方法,
21.所述基于该次拉曼光脉冲对应的相对位置信息,以及所述表征信息,获取当前水平加速运动作用下的当前有效拉比频率的步骤,包括:
22.基于该次拉曼光脉冲对应的相对位置信息、所述冷原子团的初始密度分布以及所述横向温度,获取当前冷原子团密度分布;
23.基于所述当前冷原子团密度分布,以及该次拉曼光脉冲对应的光强分布,获取该次拉曼光脉冲的当前有效拉比频率。
24.根据本发明提供的一种可移动原子干涉重力仪水平加速运动误差补偿方法,在所述基于拉曼光脉冲序列与冷原子团作用形成的干涉环路,获取重力相移的步骤之前,所述方法还包括:
25.对拉曼光的光强分布进行表征,得到拉曼光的光强分布;
26.对拉曼光的波前相位分布进行表征,得到拉曼光的波前分布;
27.对所述冷原子团的初始密度分布进行表征,得到所述冷原子团的初始密度分布;
28.对所述冷原子团的横向温度进行表征,得到横向温度。
29.根据本发明提供的一种可移动原子干涉重力仪水平加速运动误差补偿方法,所述对拉曼光的波前相位分布进行表征,得到拉曼光的波前分布的步骤,包括:
30.采用zernike多项式拟合拉曼光的波前相位分布;
31.调节待调节参数,构建方程组,其中,所述待调节参数至少可以包括:原子横向初速度、水平加速运动的信息;
32.基于所述方程组,获取各阶zernike多项式系数,得到拉曼光的波前分布。
33.本发明还提供一种可移动原子干涉重力仪水平加速运动误差补偿装置,所述装置包括:
34.重力相移获取模块,用于在单个测量周期内,基于拉曼光脉冲序列与冷原子团作用形成的干涉环路,获取重力相移,其中,所述拉曼光脉冲序列包括多次拉曼光脉冲;
35.相对位置变化信息获取模块,用于获取所述冷原子团在所述拉曼光脉冲序列的水平截面内的相对位置变化信息,其中,所述相对位置变化信息包括与多次所述拉曼光脉冲分别对应的相对位置信息;
36.有效拉比频率计算与补偿模块,用于基于所述相对位置信息,以及预先获取的表征信息,获取水平加速运动作用下的有效拉比频率,并对所述有效拉比频率进行补偿,以降低水平加速运行对原子干涉重力测量过程的影响,其中,所述表征信息包括拉曼光的光强分布、拉曼光的波前分布、所述冷原子团的初始密度分布以及横向温度;
37.波前相移和重力加速度计算模块,用于基于所述相对位置变化信息,以及所述表征信息,获取水平加速运动引入的波前相移,并基于所述波前相移以及所述重力相移,获取修正重力相移,并基于所述修正重力相移,得到单周期重力加速度。
38.根据本发明提供的一种可移动原子干涉重力仪水平加速运动误差补偿装置,上述相对位置变化信息获取模块,包括:
39.水平加速运动的信息获取单元,用于获取原子干涉重力仪的水平加速运动的信息;
40.位置变化信息获取单元,用于基于所述水平加速运动的信息,获取相对位置变化信息。
41.根据本发明提供的一种可移动原子干涉重力仪水平加速运动误差补偿装置,上述装置还包括:
42.表征模块,用于在基于拉曼光脉冲序列与冷原子团作用形成的干涉环路,获取重力相移之前,对拉曼光的光强分布进行表征,得到拉曼光的光强分布;
43.对拉曼光的波前相位分布进行表征,得到拉曼光的波前分布;
44.对所述冷原子团的初始密度分布进行表征,得到所述冷原子团的初始密度分布;
45.对所述冷原子团的横向温度进行表征,得到横向温度。
46.本发明提供的一种可移动原子干涉重力仪水平加速运动误差补偿方法和装置,通过在单个测量周期内,基于拉曼光脉冲序列与冷原子团作用形成的干涉环路,获取重力相移,其中,拉曼光脉冲序列包括多次拉曼光脉冲,获取冷原子团在拉曼光脉冲序列的水平截面内的相对位置变化信息,其中,相对位置变化信息包括与多次拉曼光脉冲分别对应的相对位置信息,基于相对位置信息,以及预先获取的表征信息,获取水平加速运动作用下的有效拉比频率,并对有效拉比频率进行补偿,以降低水平加速运行对原子干涉重力测量过程的影响,其中,表征信息包括拉曼光的光强分布、拉曼光的波前分布、冷原子团的初始密度分布以及横向温度,基于相对位置变化信息,以及表征信息,获取水平加速运动引入的波前相移,并基于波前相移以及重力相移,获取修正重力相移,并基于修正重力相移,得到单周期重力加速度。通过这样的方式,能够实时对有效拉比频率进行补偿,能够抑制水平加速运动导致的条纹对比度下降的问题,而且能够基于水平加速运动引入的波前相移,实现对水平加速运动的误差补偿,能够提高原子干涉重力仪的测量精度。
附图说明
47.为了更清楚地说明本发明或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
48.图1是本发明提供的可移动原子干涉重力仪水平加速运动误差补偿方法的流程示意图之一;
49.图2是本发明提供的可移动原子干涉重力仪水平加速运动误差补偿方法的流程示意图之二;
50.图3是本发明提供的可移动原子干涉重力仪水平加速运动误差补偿方法的流程示意图之三;
51.图4是本发明提供的可移动原子干涉重力仪水平加速运动误差补偿装置的结构示意图之一;
52.图5是本发明提供的可移动原子干涉重力仪水平加速运动误差补偿装置的结构示意图之二。
具体实施方式
53.为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
54.为了提高原子干涉重力仪的测量精度,本发明提供了一种可移动原子干涉重力仪水平加速运动误差补偿方法和装置,下面结合图1描述本发明的可移动原子干涉重力仪水平加速运动误差补偿方法。
55.如图1所示,本发明公开了一种可移动原子干涉重力仪水平加速运动误差补偿方法,方法包括:
56.s101,在单个测量周期内,基于拉曼光脉冲序列与冷原子团作用形成的干涉环路,获取重力相移。
57.为了能够获取重力相移,在单个测量周期内,可以进行冷原子团制备和速度选择,进而便可以基于拉曼光脉冲序列与冷原子团作用形成的干涉环路,进行原子末态测量,进而便可以获取到重力相移。
58.其中,拉曼光脉冲序列可以包括多次拉曼光脉冲,进而拉曼光脉冲序列与冷原子团作用的过程,可以包括多次拉曼光脉冲与冷原子团分别进行作用,可以称为多次拉曼光脉冲作用,每次拉曼光脉冲作用对应的时间信息不同。
59.s102,获取所述冷原子团在所述拉曼光脉冲序列的水平截面内的相对位置变化信息。
60.为了能够获取有效拉比频率变化和波前相移,可以获取冷原子团在所述拉曼光脉冲序列的水平截面内的相对位置变化信息,其中,相对位置变化信息可以包括与多次拉曼光脉冲分别对应的相对位置信息,也就是位置变化信息可以包括多个相对位置信息。针对
每次拉曼光脉冲与冷原子团的作用,都存在对应的相对位置信息。
61.例如,拉曼光脉冲序列可以包括3次拉曼光脉冲,分别为π/2拉曼光脉冲(拉曼光脉冲1)、π拉曼光脉冲(拉曼光脉冲2)、π/2拉曼光脉冲(拉曼光脉冲3),相对位置变化信息可以包括:与拉曼光脉冲1对应的相对位置信息1,与拉曼光脉冲2对应的相对位置信息2以及与拉曼光脉冲3对应的相对位置信息3。
62.s103,基于所述相对位置信息,以及预先获取的表征信息,获取水平加速运动作用下的有效拉比频率,并对所述有效拉比频率进行补偿,以降低水平加速运行对原子干涉重力测量过程的影响。
63.在各次拉曼光脉冲作用的时刻,由于拉曼光具有高斯型非均匀光强分布的特点,而在水平加速运动的作用下,冷原子团在拉曼光脉冲序列的水平截面内的相对位置不断变化的,这样会导致冷原子团在不同拉曼光脉冲作用的时刻,与原子作用的拉曼光的光强会随着相对位置变化信息的变化而变化。
64.与冷原子团作用的拉曼光脉冲的有效拉比频率,和与冷原子团作用的拉曼光的光强成正比,而在拉曼光脉冲的作用脉宽固定的情况下,有效拉比频率又决定了各次拉曼光脉冲与冷原子团的作用效率。有效拉比频率的变化将导致拉曼光脉冲与冷原子团的作用效率变低,进而导致原子干涉条纹对比度下降。
65.因此,在每次获取到相对位置信息的情况下,可以基于相对位置信息,以及预先获取的表征信息,获取水平加速运动作用下的有效拉比频率。
66.其中,表征信息包括拉曼光的光强分布、拉曼光的波前分布、冷原子团的初始密度分布以及横向温度。有效拉比频率包括多个,每个有效拉比频率存在唯一对应的相对位置信息,以及存在唯一对应的拉曼光脉冲,也就是每个有效拉比频率对应的拉曼光脉冲与冷原子团作用的时刻均不相同。
67.在获取到每个有效拉比频率后,可以基于该有效拉比频率与初始设定的有效拉比频率之间的差值,得到当前有效拉比频率变化。同样地,当前有效拉比频率变化存在唯一对应的相对位置信息,以及存在唯一对应的拉曼光脉冲。
68.针对每次拉曼光脉冲,在获取到该次拉曼光脉冲与冷原子团作用的时刻,可以实时对该次拉曼光脉冲对应的有效拉比频率进行补偿,以降低水平加速运行对原子干涉重力测量过程的影响。
69.换句话说,在拉曼光脉冲序列与冷原子团作用的过程中,针对不同拉曼光脉冲与冷原子团作用的时刻,会实时对有效拉比频率进行补偿,以便降低水平加速运行对原子干涉重力测量过程的影响。
70.s104,基于所述相对位置变化信息,以及所述表征信息,获取水平加速运动引入的波前相移,并基于所述波前相移以及所述重力相移,获取修正重力相移,并基于所述修正重力相移,得到单周期重力加速度。
71.在冷原子团与各次拉曼光脉冲均作用后,即在当前测试周期原子干涉完成后,可以基于相对位置变化信息以及预先获取的表征信息,获取水平加速运动的信息引入的波前相移。也就是基于相对位置变化信息、拉曼光的波前分布、冷原子团的初始密度分布以及横向温度,获取水平加速运动的信息引入的波前相移。
72.其中,水平加速运动的信息引入的波前相移为冷原子团与拉曼光脉冲序列作用
后,原子干涉条纹整体的波前相移。水平加速运动的信息可以包括水平加速度、水平运动的速度、水平运动的位移等。这都是的合理的,在此不做具体限定。
73.在获取到重力相移以及冷原子团整体的波前相移后,可以基于波前相移以及重力相移,获取修正重力相移,并基于修正重力相移,得到单周期重力加速度。
74.通过这样的方式,能够实时对有效拉比频率进行补偿,能够抑制水平加速度运动导致的条纹对比度下降的问题,而且能够基于水平加速运动引入的波前相移,实现对水平加速运动的误差补偿,能够提高原子干涉重力仪的测量精度。
75.作为本发明的一种实施方式,上述获取所述冷原子团在各个所述拉曼光脉冲的水平截面内的相对位置变化信息的步骤,可以包括:
76.获取原子干涉重力仪的水平加速运动的信息。在一种实施方式中,每次拉曼光脉冲作用对应的时间信息不同,在拉曼光脉冲序列与冷原子团作用的过程中,对原子干涉重力仪的水平加速运动的信息进行实时监测,也就是获取不同时间信息对应的水平加速运动的信息。
77.作为一种实施方式,可以采用与原子干涉重力仪刚性连接的加速度计实时测量水平加速运动的信息。作为另一种实施方式,可以采用非破坏成像方法监测释放后自由下落的冷原子团相对原子干涉重力仪或拉曼光的水平运动,从而得到水平加速运动的信息。这都是合理的,在此不作具体限定。
78.基于所述水平加速运动的信息,获取相对位置变化信息。
79.在获取到水平加速运动的信息后,可以基于水平加速运动的信息,实时计算冷原子团在拉曼光脉冲序列的水平截面内的相对位置变化信息。其中,相对位置变化信息包括多个相对位置信息。
80.在一种实施方式中,在获取到水平加速运动的信息后,可以对水平加速运动的信息进行滤波、积分、去噪等处理,从而得到更加精确的相对位置变化信息。
81.通过这样的方式,便可以计算得到冷原子团在拉曼光脉冲序列的水平截面内的相对位置变化信息,以便后续计算水平加速运动的信息引入的有效率比频率和波前相移。
82.作为本发明的一种实施方式,上述基于所述相对位置信息,以及预先获取的表征信息,获取水平加速运动作用下的有效拉比频率,并对所述有效拉比频率进行补偿的步骤可以包括:
83.针对每次拉曼光脉冲与所述冷原子团作用的时刻,基于该次拉曼光脉冲对应的相对位置信息,以及所述表征信息,获取当前水平加速运动作用下的当前有效拉比频率。
84.针对每次拉曼光脉冲与冷原子团作用的时刻,可以获取冷原子团在该次拉曼光脉冲的水平截面内的相对位置信息,也就是该次拉曼光脉冲作用的时刻对应的相对位置信息。
85.在一种实施方式中,可以基于该次拉曼光脉冲作用的时刻对应的原子干涉重力仪的当前水平加速运动的信息,获取该次拉曼光脉冲作用的时刻对应的相对位置信息,即该次拉曼光脉冲对应的相对位置信息。
86.基于该次拉曼光脉冲对应的相对位置信息,该次拉曼光脉冲对应的光强分布、冷原子团的初始密度分布以及横向温度,获取当前水平加速运动作用下的当前有效拉比频率。
87.拉曼光脉冲对应的光强分布可以通过预先测量得到,例如,可以采用激光光斑分析仪测量得到拉曼光脉冲对应的光强分布。在一种实施方式中,针对已经搭建完毕的原子干涉重力仪,该原子干涉重力仪对应的拉曼光的波前分布已经固定,可以通过提前表征的方式获取,从而不需要多次测量。
88.基于所述当前有效拉比频率,对该次拉曼光脉冲进行调节,补偿所述有效拉比频率,以降低水平加速运行对原子干涉重力测量过程的影响。
89.在获取到当前有效拉比频率后,可以基于当前有效拉比频率,以及初始设定的有效拉比频率之间的差值,得到当前有效拉比频率变化,也就是该次拉曼光脉冲对应的有效拉比频率变化,对该次拉曼光脉冲进行调节,保证该次拉曼光脉冲的作用效率,补偿水平加速运动对干涉条纹对比度的影响,以降低水平加速运行对原子干涉重力测量过程的影响。
90.作为本发明的一种实施方式,上述对该次拉曼光脉冲进行调节的步骤,可以包括:
91.调节该次拉曼光脉冲对应的拉曼光的光强;或,
92.调节该次拉曼光脉冲的脉冲宽度。
93.也就是说,可以采用以下方式中的任意一种对该次拉曼光脉冲进行调节:
94.第一种方式,调节该次拉曼光脉冲对应的拉曼光的光强。
95.在上述第一种方式中,可以基于为原子干涉重力仪提供激光(拉曼光)的激光系统的不同,设置对应的调节装置,具体可以根据实际情况进行设置。
96.例如,可以通过声光调制器、电光调制器或可调光衰减器等器件调节该次拉曼光脉冲对应的拉曼光的光强,从而抑制水平加速运动导致的干涉条纹的对比度下降的问题。
97.作为一种实施方式,在对该次拉曼光脉冲对应的拉曼光的光强进行调节后,可以记录调节后的光强分布,以便后续计算下一次拉曼光脉冲对应的有效拉比频率的变化。
98.第二种方式,调节该次拉曼光脉冲的脉冲宽度。
99.在上述第二种方式中,可以采用数字信号驱动声光调制器,调节该次拉曼光脉冲的脉冲宽度,从而实现对脉冲宽度调节的精确开关以及定时,以便根据不同拉曼光脉冲作用的时刻,快速、准确地调节拉曼光脉冲,从而能够快速、准确地保证拉曼光脉冲的作用效率,补偿水平加速运动对干涉条纹对比度的影响,以降低水平加速运行对原子干涉重力测量过程的影响。
100.本发明可以实时对有效拉比频率进行补偿,能够抑制水平加速度运动导致的条纹对比度下降的问题,并且能够与基于水平加速运动引入的波前相移,实现对水平加速运动的误差补偿,从而能够实现共同补偿,能够进一步提高可移动原子干涉重力仪的测量精度。
101.作为本发明的一种实施方式,如图2所示,上述基于该次拉曼光脉冲对应的相对位置信息,以及所述表征信息,获取当前水平加速运动作用下的当前有效拉比频率的步骤,可以包括:
102.s201,基于该次拉曼光脉冲对应的相对位置信息、所述冷原子团的初始密度分布以及所述横向温度,获取当前冷原子团密度分布。
103.由于冷原子团可以与拉曼光脉冲序列作用包括多次拉曼光脉冲作用,每次拉曼光脉冲作用对应的相对位置信息均不一致,为了确定该次拉曼光脉冲的当前有效拉比频率,可以基于该次拉曼光脉冲对应的相对位置信息、冷原子团的初始密度分布以及横向温度,获取当前冷原子团密度分布。
104.例如,在包括π/2拉曼光脉冲(拉曼光脉冲1)、π拉曼光脉冲(拉曼光脉冲2)、π/2拉曼光脉冲(拉曼光脉冲3),一共3次拉曼光脉冲作用的情况下,可以分别基于与拉曼光脉冲1对应的相对位置信息1,与拉曼光脉冲2对应的相对位置信息2以及与拉曼光脉冲3对应的相对位置信息3和冷原子团的初始密度分布以及横向温度,分别获取拉曼光脉冲1的时刻对应的冷原子团的密度分布、拉曼光脉冲2的时刻对应的冷原子团的密度分布以及拉曼光脉冲3的时刻对应的冷原子团的密度分布,即当前冷原子团密度分布。
105.s202,基于所述当前冷原子团密度分布,以及该次拉曼光脉冲对应的光强分布,获取该次拉曼光脉冲的当前有效拉比频率。
106.在获取到当前冷原子团密度分布后,可以基于当前冷原子团密度分布,与该次拉曼光脉冲对应的光强分布进行积分,获取该次拉曼光脉冲的当前有效拉比频率,也就是该次拉曼光脉冲作用的时刻对应的当前有效拉比频率。
107.通过这样的方式,可以获取不同时刻对应的当前有效拉比频率,也就是不同拉曼光脉冲对应的当前有效拉比频率,进而以便后续对拉曼光脉冲进行调节,从而能够使各个时刻水平加速运动的信息对干涉条纹的影响均被补偿,而无需复杂拟合计算即可动态评估水平加速运动与有效拉比频率之间的耦合,这种方式快速直接,能够保证误差补偿的实时性,并且能够进一步提高可移动原子干涉重力仪的测量精度。
108.作为本发明的一种实施方式,在上述基于拉曼光脉冲序列与冷原子团作用形成的干涉环路,获取重力相移的步骤之前,上述方法还可以包括:
109.对拉曼光的光强分布进行表征,得到拉曼光的光强分布。
110.对拉曼光的波前相位分布进行表征,得到拉曼光的波前分布。作为一种实施方式,可利用原子干涉实验参数扫描来拟合拉曼光的波前相位,从而得到拉曼光的波前分布。
111.对冷原子团的初始密度分布进行表征,得到冷原子团的初始密度分布,对冷原子团的横向温度进行表征,得到横向温度。在一种实施方式中,在冷原子团制备完成后,可以采用吸收成像法、黏团扩展法或拉曼光频率扫描等方法表征,从而得到原子团的密度分布和横向温度。这都是合理的,在此不做具体限定。
112.通过上述方式,可以预先精确表征拉曼光的波前分布,而后续再进行原子干涉重力测量的过程中,仅需要实时监控水平加速运动的信息,使原子干涉重力测量的过程更加快速、直接。
113.作为本发明的一种实施方式,如图3所示,上述对拉曼光的波前相位分布进行表征,得到拉曼光的波前分布的步骤,可以包括:
114.s301,采用zernike多项式拟合拉曼光的波前相位分布。
115.s302,调节待调节参数,构建方程组。
116.其中,所述待调节参数至少可以包括:原子横向初速度、水平加速运动的信息;
117.s303,基于所述方程组,获取各阶zernike多项式系数,得到拉曼光的波前分布。
118.采用zernike多项式拟合拉曼光的波前相位分布,任意形状的波前分布可以如下公式(1)所示:
[0119][0120]
其中,为任意形状的波前分布,zj(x,y)为第j阶zernike多项式,k为拟
合波前分布所使用的zernike多项式总阶数,x和y分别为任意原子在拉曼光光斑内的横坐标和纵坐标,aj为第j阶zernike多项式的系数。
[0121]
由于原子干涉的最终相位,体现为冷原子团内所有原子相位的平均,原子干涉过程中,冷原子团的横向膨胀使不同速度的原子经历了不同的下落轨迹,并且,在不同横向位置与拉曼光相互作用,而由于拉曼光的波前不均匀,各个原子之间将存在相对相移。因此,最终的干涉相移是在原子团密度分布内的积分,即如下公式(2)所示
[0122]
δφ
wf
=δφ
wf,1-2δφ
wf,2
+δφ
wf,3
[0123][0124]
其中,fr(x,y)为冷原子团的初始密度分布,(x1,y1)为单个冷原子与第一束拉曼光脉冲(π/2拉曼光脉冲)作用时,原子位于拉曼光光斑内的位置坐标,(x2,y2)为单个冷原子与第二束拉曼光脉冲(π拉曼光脉冲)作用时,原子位于拉曼光光斑内的位置坐标,(x3,y3)为单个冷原子与第三束拉曼光脉冲(π/2拉曼光脉冲)作用时,原子位于拉曼光光斑内的位置坐标,s为积分区间,即拉曼光的覆盖范围。
[0125]
由于冷原子团的初始密度分布已预先表征,因此,上述公式(2)可以改写为公式(3)
[0126][0127]
其中,t0冷原子释放到第一束拉曼脉冲作用的等待时间,t为各次拉曼光脉冲之间的原子自由演化时间,(x0,y0)为原子的初始位置,(v
x
,vy)为原子水平速度。
[0128]
其中,的展开式如公式(4)所示:
[0129][0130]
将上述公式(4)代入至公式(1),可以得到公式(5)
[0131]
[0132]
由于用于操控原子的拉曼光,其所对应的激光系统与重力仪探头刚性连接,而冷原子团在原子干涉重力测量的过程中,仅受重力作用的进行自由下落,在重力仪静止或水平匀速运动的情况下,自由下落的冷原子团不会在水平面内相对拉曼光光斑中心移动,因此现有技术在表征拉曼光波前时,一般只考虑非奇对称zernike项,在只考虑前55阶zernike多项式时,包括z4、z
11
、z
22
和z
37
项、而奇对称项的积分近似为0。
[0133]
但是,当原子干涉重力仪水平加速运动时,从冷原子团释放到完成原子末态探测的过程中,水平加速运动会导致与原子干涉重力仪探头刚性连接的拉曼光的位置相对与冷原子团发生运动,使上述忽略的奇对称zernike项的贡献不可忽略。具体实施方法上,可以将水平加速运动因素引入波前相移公式中,即如下公式(6)所示:
[0134][0135]
通过控制激光参数、模拟运动过程等,扫描原子横向初速度、重力仪水平加速运动的信息,结合冷原子团的初始密度分布、横向温度、干涉时间等参数的扫描,测量相应条纹相移,构造不同方向、不同量级的水平加速运动参数下的方程组,求解得到包含奇对称项的各阶zernike多项式系数,基于各阶zernike多项式系数重构拉曼光的波前分布。
[0136]
可见,本发明在波前相移中加入奇对称zernike项的考量,有利于进一步提升可移动原子干涉重力仪的测量精度。
[0137]
下面对本发明提供的一种可移动原子干涉重力仪水平加速运动误差补偿装置进行描述,下文描述的一种可移动原子干涉重力仪水平加速运动误差补偿装置与上文描述的一种可移动原子干涉重力仪水平加速运动误差补偿方法可相互对应参照。
[0138]
如图4所示,一种可移动原子干涉重力仪水平加速运动误差补偿装置,上述装置包括:
[0139]
重力相移获取模块410,用于在单个测量周期内,基于拉曼光脉冲序列与冷原子团作用形成的干涉环路,获取重力相移。
[0140]
其中,所述拉曼光脉冲序列包括多次拉曼光脉冲。
[0141]
相对位置变化信息获取模块420,用于获取所述冷原子团在所述拉曼光脉冲序列的水平截面内的相对位置变化信息。
[0142]
其中,所述相对位置变化信息包括与多次所述拉曼光脉冲分别对应的相对位置信息。
[0143]
有效拉比频率计算与补偿模块430,用于基于所述相对位置信息,以及预先获取的表征信息,获取水平加速运动作用下的有效拉比频率,并对所述有效拉比频率进行补偿,以降低水平加速运行对原子干涉重力测量过程的影响。
[0144]
其中,所述表征信息包括拉曼光的光强分布、拉曼光的波前分布、所述冷原子团的初始密度分布以及横向温度。
[0145]
波前相移和重力加速度计算模块440,用于基于所述相对位置变化信息,以及所述表征信息,获取水平加速运动引入的波前相移,并基于所述波前相移以及所述重力相移,获取修正重力相移,并基于所述修正重力相移,得到单周期重力加速度。
[0146]
作为本发明的一种实施方式,上述相对位置变化信息获取模块420,可以包括:
[0147]
水平加速运动的信息获取单元,用于获取原子干涉重力仪的水平加速运动的信息;
[0148]
位置变化信息获取单元,用于基于所述水平加速运动的信息,获取相对位置变化信息。
[0149]
作为本发明的一种实施方式,上述有效拉比频率计算与补偿模块430,可以包括:
[0150]
有效拉比频率计算单元,用于针对每次拉曼光脉冲与所述冷原子团作用的时刻,基于该次拉曼光脉冲对应的相对位置信息,以及所述表征信息,获取当前水平加速运动作用下的当前有效拉比频率。
[0151]
有效拉比频率补偿单元,用于基于所述当前有效拉比频率,对该次拉曼光脉冲进行调节,补偿所述当前有效拉比频率,以降低水平加速运行对原子干涉重力测量过程的影响。
[0152]
作为本发明的一种实施方式,上述有效拉比频率补偿单元可以包括:
[0153]
第一调节子单元,用于调节该次拉曼光脉冲对应的拉曼光的光强。或,
[0154]
第二调节子单元,用于调节该次拉曼光脉冲的脉冲宽度。
[0155]
作为本发明的一种实施方式,上述有效拉比频率计算单元可以包括:
[0156]
第一获取子单元,用于基于所述当前相对位置信息、所述初始密度分布以及所述横向温度,获取当前密度分布;
[0157]
第二获取子单元,用于基于所述当前密度分布,以及该次拉曼光脉冲对应的光强分布,获取该次拉曼光脉冲的有效拉比频率。
[0158]
作为本发明的一种实施方式,上述装置还可以包括,
[0159]
表征模块,用于在基于拉曼光脉冲序列与冷原子团作用形成的干涉环路,获取重力相移之前,对拉曼光的光强分布进行表征,得到拉曼光的光强分布。
[0160]
对拉曼光的波前相位分布进行表征,得到拉曼光的波前分布。
[0161]
对所述冷原子团的初始密度分布进行表征,得到所述冷原子团的初始密度分布。
[0162]
对所述冷原子团的横向温度进行表征,得到横向温度。
[0163]
作为本发明的一种实施方式,上述表征模块,可以具体用于采用zernike多项式拟合拉曼光的波前相位分布。
[0164]
调节待调节参数,构建方程组。
[0165]
其中,所述待调节参数至少可以包括:原子横向初速度、水平加速运动的信息。
[0166]
基于所述方程组,获取各阶zernike多项式系数,得到拉曼光的波前分布。
[0167]
为了更加方便理解本发明提供的一种可移动原子干涉重力仪水平加速运动误差补偿装置,下面结合图5对本发明提供的可移动原子干涉重力仪水平加速运动误差补偿装置进行举例介绍:
[0168]
如图5所示,可移动原子干涉重力仪水平加速运动误差补偿装置可以包括原子干涉重力仪探头以及重力相移计算单元组成的重力相移获取模410、水平加速运动的信息获取单元501、位置变化信息获取单元502、表征模块503、波前相移和重力加速度计算模块440、有效拉比频率计算单元504、有效拉比频率补偿单元505。
[0169]
其中,重力相移获取模410与水平加速运动的信息获取单元501刚性连接,以保证水平测量轴与重力方向正交。水平加速运动的信息获取单元501与有效拉比频率计算单元504以及位置变化信息获取单元502连接,有效拉比频率计算单元504与有效拉比频率补偿单元505连接,有效拉比频率补偿单元505与重力相移获取模410以及表征模块503连接,位置变化信息获取单元502与波前相移计算模块440连接,波前相移和重力加速度计算模块440与表征模块503连接。
[0170]
其中,表征模块503可以对拉曼光脉冲的水平截面内的光强分布进行表征,得到拉曼光的光强分布。还可以对拉曼光的波前相位分布进行表征,得到拉曼光的波前分布,对冷原子团的初始密度分布进行表征,得到冷原子团的初始密度分布,对冷原子团的横向温度进行表征,得到横向温度。还可以实现对上述表征的信息进行调用和存储。
[0171]
在一种实施方式中,波前相移和重力加速度计算模块可以由波前相移计算单元与重力加速度计算单元组成。水平加速运动的信息获取单元也可以称为水平运动监测单元。上述原子干涉重力仪还可以包括激光参数控制单元,用于对拉曼光的光强或拉曼光脉冲的脉冲宽度进行调节。这都是合理的。
[0172]
本发明提供的可移动原子干涉重力仪水平加速运动误差补偿装置结构简单水平加速运动的信息获取单元可利用现有垂向振动补偿技术中所广泛采用的三轴速度计,相应的计算也不需要增加额外的高速处理器,有利于控制系统复杂度和成本。
[0173]
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1