一种跨平台捷联式动态重力仪
1.本发明涉及重力测量领域,尤其涉及一种跨平台捷联式动态重力仪。
背景技术:
2.地球重力场是地球重要的基本物理特征之一,通过测量地球重力场,既可揭示地球本身内在的运动发展规律和物质分布,又可探究地球附近空间物理事件产生和发展的机理。因此,重力信息在资源勘探和军事领域的应用对国民经济和国防建设具有战略意义。
3.目前地球重力场的测量手段主要有卫星重力测量、海空重力测量以及地面重力测量等。卫星重力测量经过几十年的发展,对于覆盖全球的重力场精度和分辨率得到较大提升,但却无法测定高分辨率、高频重力场数据,获取的中长波段重力信息在近岸和局部精细化重力场等方面难以达到理想水平。
4.海洋和航空重力测量主要是将重力仪安装在轮船或飞机上,在运动载体中进行的连续重力测量。船载海洋重力测量可以采集大范围的、较高频段的海洋重力场信息,但较慢的航行速度导致重力测量效率低下,对海陆交界的滩涂地区和浅海区域的测量难度较大。航空重力测量近年来迎来快速发展,可以在一些人迹罕至的沙漠、沼泽、极地、森林等特殊区域快速、机动地获取大面积、精度良好的重力数据信息,被认为是获取高精度、中高分辨率重力场信息的有效手段之一。
5.地面车载重力测量是将重力测量设备安装在汽车上,通过试验车在路面移动行驶开展重力测量试验,与航空和海洋重力测量类似,属于动基座相对重力测量的范畴。车辆沿着地球表面的道路行驶,较慢的运动车速和机动灵活的重力测量实施方式为精细化区域重力场信息提供了较好的选择。重力测量系统越靠近地球表面,不同频段的重力信息会越丰富。考虑到重力场的能量分量(特别是短波部分)随着海拔的降低而逐渐增强,重力信号信噪比在地面重力测量系统中会得到提高。
6.我国开展重力测量和重力场建设的研究起点较低、时间较晚,与西方发达国家在理论研究、仪器研发和数据处理等方面均存在较大差距。由于我国幅员辽阔、地形复杂,全国范围内的重力测量工作开展起来比较复杂,不仅有大面积的重力测量空白区,区域高精度的重力场建设也面临严峻形势。但是,现有的传统重力仪无法适应不同测区环境,难以满足精细化区域重力场测量的需求。
技术实现要素:
7.本发明的目的在于提供一种跨平台捷联式动态重力仪。
8.为实现上述发明目的,本发明提供一种跨平台捷联式动态重力仪,包括:捷联式重力测量系统,与所述重力测量系统可拆卸连接的外部观测部分,以及用于采集所述重力测量系统和所述外部观测部分输出的测量数据并处理的监控部分;
9.所述重力测量系统包括:外壳体,捷联式惯导系统和电控系统;
10.所述惯导系统密封安装在所述外壳体的内部;
11.所述电控系统挂载在所述外壳体的外侧,且与所述惯导系统电连接。
12.根据本发明的一个方面,所述惯导系统包括:重力传感器单元和姿态传感器单元;
13.所述重力传感器单元包括:第一基座,以及三个加速度计;
14.所述第一基座具有三个相互垂直的安装基准面,三个所述加速度计分别在所述安装基准面安装;
15.所述姿态传感器单元包括:三个陀螺仪;
16.三个所述陀螺仪沿三个相互垂直的方向设置。
17.根据本发明的一个方面,所述加速度计为石英挠性加速度计,且其静态精度优于0.1mgal;
18.所述陀螺仪为激光陀螺仪,且其零偏稳定性优于0.005
°
/h。
19.根据本发明的一个方面,所述重力传感器单元通过所述第一基座连接在所述姿态传感器单元的下端。
20.根据本发明的一个方面,所述外部观测部分包括:至少一个功能模块;
21.若所述功能模块为一个,则所述功能模块为gnss模块、激光测速仪模块、水下多普勒测速仪模块、水下超短基线定位模块、深度计模块中的一种;
22.若所述功能模块为多个,则多个所述功能模块采用gnss模块、激光测速仪模块、水下多普勒测速仪模块、水下超短基线定位模块、深度计模块中多种的组合。
23.根据本发明的一个方面,所述功能模块采用gnss模块,则所述跨平台捷联式动态重力仪以所述重力测量系统和所述gnss模块的输出结果进行船载组合导航或航空组合导航;或者,
24.所述功能模块采用gnss模块和激光测速仪模块的组合,则所述跨平台捷联式动态重力仪以所述重力测量系统,所述gnss模块和所述激光测速仪模块的输出结果进行车载组合导航;或者,
25.所述功能模块采用水下多普勒测速仪模块、水下超短基线定位模块、深度计模块的组合,则所述跨平台捷联式动态重力仪以所述重力测量系统、所述水下多普勒测速仪模块、所述水下超短基线定位模块和所述深度计模块的输出结果进行水下组合导航。
26.根据本发明的一个方面,所述外壳体包括:两端开口且中空的支承主体,在所述支承主体一端开口密封连接的第一端盖结构,在所述支承主体另一端开口密封连接的第二端盖结构,以及在所述支承主体内设置的减震座;
27.在所述支承主体的内侧壁上且沿远离所述支承主体的方向依次设置有主体磁屏蔽层、主体隔热层和主体固定板;
28.所述第一端盖结构包括:第一端盖,与所述第一端盖相接触的安装在所述第一端盖内侧壁上的温控组件;
29.在所述第一端盖的内侧壁上且沿远离所述第一端盖的方向依次设置有第一隔热层和第一磁屏蔽层,且所述第一隔热层在所述温控组件的周围环绕设置;
30.在所述第一磁屏蔽层上设置有贯穿其本体的透气通道;
31.所述第二端盖结构包括:第二端盖;
32.在所述第二端盖的内侧壁上且沿远离所述第二端盖的方向依次设置有第二磁屏蔽层、第二隔热层和第二固定板;
33.所述第一磁屏蔽层的边缘与所述主体磁屏蔽层的边缘相接触的设置;
34.所述第二磁屏蔽层的边缘与所述主体磁屏蔽层的边缘相接触的设置;
35.所述第二隔热层的边缘与所述主体隔热层的边缘相互抵靠的设置;
36.所述减震座在所述支承主体上规则的设置有多个,其一端与所述支承主体的侧壁相互固定连接,另一端与所述捷联式惯导系统相互固定连接;
37.所述减震座与所述支承主体相连接的一端嵌入在所述主体隔热层中设置。
38.根据本发明的一个方面,所述第一端盖的内侧壁上设置有安装凹槽;
39.所述第一隔热层和所述温控组件设置于所述安装凹槽中,且所述第一磁屏蔽层的边缘与所述安装凹槽的边缘形状相配的固定安装,用于将所述第一隔热层和所述温控组件限制在所述安装凹槽内;
40.所述温控组件包括:温控组件,散热器;
41.所述温控组件与所述第一端盖相接触的连接;
42.所述散热器与所述温控组件相接触的设置。
43.根据本发明的一个方面,所述温控组件采用半导体温控组件,且间隔的设置有多个;
44.所述第一隔热层在所述温控组件的周围包围设置;
45.所述散热器压靠在所述温控组件上,且所述散热器的边缘嵌入在所述第一隔热层内;
46.所述散热器的边缘通过螺纹连接件与所述第一端盖相互固定连接;
47.所述螺纹连接件与所述第一端盖的连接位置之间设置有t型隔热垫,且所述第一隔热层对所述螺纹连接件的端部包覆设置。
48.根据本发明的一个方面,所述温控组件还包括:循环风扇;
49.所述循环风扇安装在所述第一磁屏蔽层远离所述散热器的一侧,且与所述透气通道相对设置;
50.所述第一端盖结构还包括:端盖散热器;
51.所述端盖散热器包括:散热器翅片和散热器风扇;
52.所述散热器翅片和所述散热器风扇并排的设置在所述第一端盖的外侧壁上,其中,所述散热器翅片与所述第一端盖焊接连接。
53.根据本发明的一种方案,本发明具有小型化,以及跨平台应用的能力,能够实现在航空、海洋、车载、水下通用,可以实现全天候复杂环境下的动态重力测量。
54.根据本发明的一种方案,本发明采用多传感器硬同步数据记录数据采集和监控系统集成度高,在输出重力结果的同时,保留原始测量数据,方便事后计算。
55.根据本发明的一种方案,本发明针对其应用环境的需要,在机械结构上设计了温控、减震、气密系统,提高了本发明的环境适应性。
56.根据本发明的一种方案,本发明的系统结构进行了模块化设计,各类传感器可根据具体需要进行组合。此外,本发明还可根据测量环境不同、功能模块的不同,自适应调整滤波算法参数实现高精度组合导航。
57.根据本发明的一种方案,本发明实现了重力传感器单元和姿态传感器单元的一体化设计,使得结构更为紧凑,减小了整体的体积和重量,不仅降低了系统整体加工成本,而
且有利于提高系统结构参数的稳定性。
58.根据本发明的一种方案,本发明的重力测量系统实现了温控精度在
±ꢀ
0.02℃以上,极大的保证了重力测量系统运行环境的稳定和系统运行精度。
59.根据本发明的一种方案,相比于传统的重力仪,本发明充分实现了跨平台全域测量,同时测量精度也达到国际先进水平。此外,在本发明在测量过程中可保留原始测量结果,实现了后续的数据挖掘。
60.根据本发明的一种方案,本发明具有多传感器数据同步处理记录,以及具有多种数据融合的能力,提高环境适应性,保证了测量精度。
附图说明
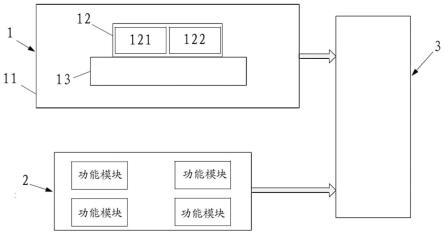
61.图1是示意性表示根据本发明的一种实施方式的跨平台捷联式动态重力仪的结构框图;
62.图2是示意性表示根据本发明的一种实施方式的跨平台捷联式动态重力仪的立体图;
63.图3是示意性表示根据本发明的一种实施方式的跨平台捷联式动态重力仪捷联式惯导系统的结构图;
64.图4是示意性表示根据本发明的一种实施方式的跨平台捷联式动态重力仪的截面图;
65.图5是示意性表示根据本发明的一种实施方式的散热器的结构图;
66.图6是示意性表示根据本发明的一种实施方式的第一端盖结构的结构图;
67.图7是示意性表示根据本发明的一种实施方式的减震座的结构图;
68.图8是示意性表示图4中a位置的放大图;
69.图9是示意性表示根据本发明的一种实施方式的跨平台捷联式动态重力仪的工作流程图。
具体实施方式
70.为了更清楚地说明本发明实施方式或现有技术中的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是本发明的一些实施方式,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
71.在针对本发明的实施方式进行描述时,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”所表达的方位或位置关系是基于相关附图所示的方位或位置关系,其仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本发明的限制。
72.下面结合附图和具体实施方式对本发明作详细地描述,实施方式不能在此一一赘述,但本发明的实施方式并不因此限定于以下实施方式。
73.结合图1、图2、图3和图4所示,根据本发明的一种实施方式,本发明的一种跨平台捷联式动态重力仪,本发明的跨平台捷联式动态重力仪可实现在航空、海洋、车载、水下等
不同领域的通用,实现了全天候复杂环境下的动态重力测量和导航。具体的,其包括:捷联式重力测量系统1,与重力测量系统1可拆卸连接的外部观测部分2,以及用于采集重力测量系统1和外部观测部分2输出的测量数据并处理的监控部分3。在本实施方式中,重力测量系统1包括:外壳体11,捷联式惯导系统12和电控系统13;其中,惯导系统12密封安装在外壳体1的内部;电控系统13挂载在外壳体11的外侧,且与惯导系统12电连接。
74.结合图1、图2、图3和图4所示,根据本发明的一种实施方式,惯导系统12包括:重力传感器单元121和姿态传感器单元122。其中,重力传感器单元121包括:第一基座121a,以及三个加速度计121b;在本实施方式中,第一基座121a具有三个相互垂直的安装基准面,三个加速度计121b 分别在安装基准面安装;其中,第一基座121a包括:板状的支撑部和设置在该支撑部上的支撑凸台。上述的三个安装基准面则位于该支撑凸台上,进而以实现加速计121b在安装基准面上的固定。
75.在本实施方式中,姿态传感器单元122包括:三个陀螺仪122a;其中,三个陀螺仪122a沿三个相互垂直的方向设置(即按照预先定义的xyz三维坐标轴方向)。在本实施方式中,在三个陀螺仪122a连接在一个矩形体结构的侧壁上,并且在该矩形体结构的顶点位置分别安装有连接支座,用于实现姿态传感器单元122与外壳体11的固定连接。在本实施方式中,用于安装三个陀螺仪122a的矩形体为预先设置的中空矩形体安装基座,选择其中的三个侧面用于安装陀螺仪122a,进而方便的实现姿态传感器单元122 结构的稳定,以及方便与第一基座121a的连接和内部空间供加速度计121b 布置。在本实施方式中,陀螺仪122a采用机抖激光陀螺。
76.根据本发明的一种实施方式,加速度计121b为石英挠性加速度计,且其静态精度优于0.1mgal;陀螺仪122a为激光陀螺仪,且其零偏稳定性优于0.005
°
/h。
77.结合图1、图2、图3和图4所示,根据本发明的一种实施方式,重力传感器单元121通过第一基座121a连接在姿态传感器单元122的下端。在本实施方式中,如前所述的,姿态传感器单元122通过三个陀螺仪122a相互连接构成一个矩形体结构时,其内部可具有一个中空的容纳空间,进而可方便的将重力传感器单元121安装在该容纳空间,以提高空间的利用率,使得结构更为紧凑;具体的,第一基座121a上安装加速度计121b的支撑凸台伸入在该容纳空间中,而通过板状的支撑部实现与姿态传感器单元122 下端的固定(例如,螺钉连接)即可。
78.如图1所示,根据本发明的一种实施方式,外部观测部分2包括:至少一个功能模块;若功能模块为一个,则功能模块为gnss模块、激光测速仪模块、水下多普勒测速仪模块、水下超短基线定位模块、深度计模块中的一种;若功能模块为多个,则多个功能模块采用gnss模块、激光测速仪模块、水下多普勒测速仪模块、水下超短基线定位模块、深度计模块中多种的组合。
79.如图1所示,根据本发明的一种实施方式,功能模块采用gnss模块,则跨平台捷联式动态重力仪以重力测量系统1和gnss模块的输出结果进行船载组合导航或航空组合导航;或者,
80.功能模块采用gnss模块和激光测速仪模块的组合,则跨平台捷联式动态重力仪以重力测量系统1,gnss模块和激光测速仪模块的输出结果进行车载组合导航;或者,
81.功能模块采用水下多普勒测速仪模块、水下超短基线定位模块、深度计模块的组
合,则跨平台捷联式动态重力仪以重力测量系统1、水下多普勒测速仪模块、水下超短基线定位模块和深度计模块的输出结果进行水下组合导航。
82.需要注意的是,组合导航即为提供精确位置信息和原始重力信息,其中,重力测量结果来源于高精度导航,需要通过重力异常解算,再进行低通滤波得到最终重力测量结果。因此,通过重力测量系统1的重力结算结果获取确切位置(测线)的重力异常值即可反馈至组合导航的结果中以实现组合导航作用。
83.结合图1、图2、图3和图4所示,根据本发明的一种实施方式,外壳体 11包括:两端开口且中空的支承主体111,在支承主体111一端开口密封连接的第一端盖结构112,在支承主体111另一端开口密封连接的第二端盖结构113,以及在支承主体111内设置的减震座114。在本实施方式中,通过支承主体111、第一端盖结构112和第二端盖结构113的相互密封连接(如,在相互连接的位置设置有密封圈)以构成一个封闭的隔热空间,且该空间还具有温度调节和电磁屏蔽的性能。具体的,在本实施方式中,本发明的支承主体111采用的是两端开口的矩形框体,在支承主体111的内侧壁上且沿远离支承主体111的方向依次设置有主体磁屏蔽层111a、主体隔热层111b和主体固定板111c。其中,主体磁屏蔽层111a采用粘接的方式连接在支承主体111的内侧壁上,然后通过粘接的方式将主体隔热层 111b安装在主体固定板111c上,并采用尼龙螺钉将主体固定板111c固定在支承主体111上,进而通过上述设置,实现了支承主体111的屏蔽和隔热处理。
84.在本实施方式中,为实现本发明的隔热性、屏蔽性,在第一端盖结构 112中其同样需要设置相应的结构,以及在第一端盖结构112上还需要设置控温组件以实现对整个壳体内部的温度进行准确调控。具体的,在本实施方式中,第一端盖结构112包括:第一端盖1121,与第一端盖1121相接触的安装在第一端盖1121内侧壁上的温控组件1122;此外,在第一端盖1121的内侧壁上且沿远离第一端盖1121的方向依次设置有第一隔热层 112a和第一磁屏蔽层112b,且第一隔热层112a在温控组件1122的周围环绕设置。在本实施方式中,在第一磁屏蔽层112b上设置有贯穿其本体的透气通道;通过设置在第一磁屏蔽层112b上的透气通道,可直接实现第一磁屏蔽层112b相对两侧气流的交换,进而实现对壳体内部环境温宿进行准确调控的目的。
85.在本实施方式中,第二端盖结构113包括:第二端盖1131;其中,在第二端盖1131的内侧壁上且沿远离第二端盖1131的方向依次设置有第二磁屏蔽层113a、第二隔热层113b和第二固定板113c。在本实施方式中,第二磁屏蔽层113a采用粘接的方式连接在第二端盖1131的内侧壁上,然后通过粘接的方式将第二隔热层113b安装在第二固定板113c,并采用尼龙螺钉将第二固定板113c固定在第二端盖1131上,进而通过上述设置,实现了第二端盖结构113的屏蔽和隔热处理。
86.在本实施方式中,第一端盖1121和第二端盖1131分别采用螺纹连接件与支承主体111的相对两端实现密封连接,其中,在第一端盖1121和第二端盖1131与支承主体111相接触的位置分别设置有密封圈,以保证对接位置的气密性,以及,在螺纹连接件与第端盖121和第二端盖1131相接触的位置还设置有密封件,以保证在连接位置的密封性。
87.在本实施方式中,第一磁屏蔽层112b的边缘与主体磁屏蔽层111a的边缘相接触的设置;第二磁屏蔽层113a的边缘与主体磁屏蔽层111a的边缘相接触的设置;通过屏蔽层之间的相互连接,实现了屏蔽结构的全包围设置,进而对有效保证本发明的屏蔽性能有益。
88.在本实施方式中,第二隔热层113b的边缘与主体隔热层111b的边缘相互抵靠的设置。通过上述设置实现了隔热层的包围设置,保证了本发明的优良隔热性能。
89.在本实施方式中,减震座114在支承主体111上规则的设置有多个,其一端与支承主体111的侧壁相互固定连接,另一端与捷联式惯导系统12 相互固定连接;减震座114与支承主体111相连接的一端嵌入在主体隔热层111b中设置。
90.结合图4、图5和图6所示,根据本发明的一种实施方式,第一端盖1121 的内侧壁上设置有安装凹槽1121a。在本实施方式中,第一端盖1121包括:用于与支承主体111相对接的连接环边,与连接环边相连接的侧壁部分;其中,侧壁部分的边缘与连接环边的内环边缘固定连接的构成安装凹槽 121a。在本实施方式中,侧壁部分上的部分位置向远离支承主体111的方向凸起设置,以使得安装凹槽121a的深度更大,以实现温控组件1122,第一隔热层112a的嵌入安装。
91.在本实施方式中,第一隔热层112a和温控组件1122设置于安装凹槽 1121a中,且第一磁屏蔽层112b的边缘与安装凹槽1121a的边缘形状相配的固定安装,用于将第一隔热层112a和温控组件1122限制在安装凹槽 1121a内。通过上述设置,有效的保证了第一隔热层112a、温控组件1122、第一磁屏蔽层112b在第一端盖1121上的嵌入安装,提高了第一端盖结构 112的集成度,有效的消除了其内侧的突出结构,使得其在与支承主体111 安装时更加方便快捷,同时还有效避免了对内部结构的干涉和占用,保证了外壳具有充足的内部空间。
92.结合图4、图5和图6所示,根据本发明的一种实施方式,温控组件1122 包括:温控组件11221,散热器11222。在本实施方式中,温控组件11221 与第一端盖1121相接触的连接;散热器11222与温控组件11221相接触的设置。在本实施方式中,温控组件11221采用半导体温控组件(例如tec 半导体),且间隔的设置有多个;第一隔热层112a在温控组件11221的周围包围设置。其中,多个温控组件11221通过在表面上均匀的涂覆上导热硅脂后与第一端盖1121的内侧面贴附安装,以实现其上产生的热量能够更快速的散发至第一端盖1121上,在安装温控组件11221后,在温控组件 11221的周围安装第一隔热层112a,其中,第一隔热层112a在相邻的温控组件11221之间,以及在温控组件11221与第一端盖1121的连接环边分别进行形状相适配的填充,以实现对第一端盖1121上未安装温控组件11221 的周围区域实现隔热处理,保证了温控组件11221的充分散热的情况下,最大限度的保证了第一端盖结构112的隔热效果。
93.在本实施方式中,散热器11222压靠在温控组件11221上,且散热器 11222的边缘嵌入在第一隔热层112a内;其中,结合图2和图3所示,散热器11222包括:温控板11222b和安装在温控板11222b一侧的温控翅片 11222c。在本实施方式中,在温控板11222b背离温控翅片11222c的一侧与温控组件11221位置相对应的均匀涂覆有导热硅脂层,进而温控板 11222b可直接贴附在温控组件11221的侧面上,以实现良好的传热效果。在本实施方式中,由于温控板11222b是直接贴附在温控组件11221的表面上的,进而,温控组件11221之间的第一隔热层112a的部分也同时与温控板11222b相互抵靠,实现了对相邻温控组件11221的隔离,以保证对温控组件11221的充分封闭,消除了温控组件11221与温控板11222b之间可能存在的气隙,对提高散热器11222的导热性能有益,进而更为有效的保证了温控组件11221的温控性能和温控效率。
94.在本实施方式中,温控翅片11222c与温控板11222b采用低温焊膏直接焊接连接的,以保证温控翅片11222c能够更为快速的将温控板11222b 上的温度传导出去,以实现对壳体内环境温度的及时准确控制。
95.在本实施方式中,温控翅片11222c为铜制翅片,其热交换效率更高,其焊接更为牢固,结构稳定性好。
96.在本实施方式中,散热器11222的边缘通过螺纹连接件与第一端盖 1121相互固定连接;其中,在螺纹连接件与第一端盖1121的连接位置之间设置有t型隔热垫11222a,且散热器11222边缘在嵌入第一隔热层112a 中实现隔热覆盖的情况下,第一隔热层112a相应的对螺纹连接件的端部实现包覆设置。
97.通过上述设置,有效保证了本发明的第一端盖组件的隔热效果,保证了温控单元边缘的密封性能,极大的提高了第一端盖组件隔热性能,同时对保证温控组件的温控精度有益。
98.结合图4、图5和图6所示,根据本发明的一种实施方式,温控组件1122 还包括:循环风扇11223;在本实施方式中,循环风扇11223安装在第一磁屏蔽层112b远离散热器11222的一侧,且与透气通道相对设置;
99.在本实施方式中,第一磁屏蔽层112b呈板状结构,其结构强度高,进而在将其安装在第一隔热层112a的外侧时,其可与第一端盖1121围成一个较大的空腔,用于安装第一隔热层112a和温控组件11221,而且除此之外,在散热器11222的相对两侧(如图中的竖直方向的上下两侧)之间还具有多余空间,用于实现气流的流动,进而通过循环风扇11223的作用即可实现气流在散热器11222相对两侧的流动换热后被输送至壳体内部,进而达到了优良的换热效果,对保证壳体内部气流的流动和恒温控制有益。
100.在本实施方式中,散热器11222上温控翅片11222c远离温控板11222b 的一端可与第一磁屏蔽层112b相接触的设置。通过上述设置,可直接实现散热器11222与第一磁屏蔽层112b之间的热交换,进而可通过第二磁屏蔽层以实现对壳体内热交换的结构,由于第二磁屏蔽层面积大的特点,其热交换效率更高,进而对提高本发明的温控单元的调节效率更为有益。
101.结合图4、图5和图6所示,根据本发明的一种实施方式,第一端盖结构 112还包括:端盖散热器1123;在本实施方式中,端盖散热器1123包括:散热器翅片1123a和散热器风扇1123b;在本实施方式中,散热器翅片1123a 和散热器风扇1123b并排的设置在第一端盖1121的外侧壁上,其中,散热器翅片1123a与第一端盖1121焊接连接。在本实施方式中,第一端盖1121 的外侧壁上的至少部分位置设置有镍金属镀层,通过低温焊膏即可将散热器翅片1123a焊接在第一端盖1121的外侧壁上。在本实施方式中,散热翅片为铜制翅片。
102.结合图4、图5和图6所示,根据本发明的一种实施方式,沿第一端盖 1121的周向,在散热器翅片1123a的周围包覆有支撑围板,且支撑围板通过螺纹连接件与第一端盖1121的外侧壁相连接的设置。在本实施方式中,支承围板的部分与散热翅片具有间隔的设置,以形成一个安装空腔,进而散热器风扇1123b即可与支撑围板相互固定的安装在该安装空腔内。在本实施方式中,散热器风扇1123b的送风方向与散热器翅片1123a的长度方向是一致的,进而可以使得散热器风扇1123b送出的风从相邻散热器翅片 1123a的间隔位置流动而带走散热器翅片1123a上的热量,使得散热效果更优。
103.如图4所示,根据本发明的一种实施方式,第一隔热层112a采用聚氨酯发泡剂发泡成型。通过采用发泡成型的第一隔热层112a可更加紧密的实现与第一端盖1121的配合,有效的保证了本发明的隔热性能,以及对温控组件周边的密封性能。
104.结合图3、图4、图7和图8所示,根据本发明的一种实施方式,减震座 114包括:底座部分1141,与底座部分1141相连接的减震主体部分1142,与减震主体部分1142相连接的连接座部分1143;其中,底座部分1141、减震主体部分1142和连接座部分1143同轴连接。
105.在本实施方式中,底座部分1141、减震主体部分1142和连接座部分 1143依次采用相互嵌合的方式相连接。其中,底座部分1141整体呈中空的板状体,其一侧设置有凸出的环形凸台,而减震主体部分1142为一端径向缩小的中空筒状体,其大直径端与底座部分1141相互嵌合的连接,具体的,在减震主体部分1142的大直径端的底部设置有环形凹槽,以用于底座部分1141上的环形凸台插入实现底座部分1141与减震主体部分1142同轴的嵌合连接。在本实施方式中,减震主体部分1142大直径端所具有的环形凹槽的两侧壁的高度是不同的,其中,处于径向内侧的侧壁的高度要高于径向外侧的侧壁的高度,这样使得减震主体部分1142与底座部分1141同轴嵌合时,环形凹槽处于径向内侧的侧壁的高度高,进而可适得其插入的深度要明显高于另一侧壁的高度。通过将环形凹槽相对的两个侧壁设置为高低不同的,进而可通过较高的环形侧壁以实现对减震主体部分1142的准确定位,即保证了连接位置的结构强度和结构稳定性,又保证了连接位置的连接精度,极大的提高了减震座114的使用可靠性。
106.在本实施方式中,连接座部分1143位于减震主体部分1142的小直径端。其中,连接座部分1143包括:连接座主体,在连接座主体一端同轴连接的连接凸台;其中,连接凸台的直径小于连接座主体的直径,并且在连接凸台远离连接座主体的一端的边缘径向凸出形成连续的环状凸起。进而通过连接凸台的上述设置,使得连接凸台与连接座主体之间形成一个环形的嵌合凹槽,进而通过在减震主体部分1142的小直径端的内侧设置与上述嵌合凹槽相配合的嵌合凸台即可实现连接座部分1143与减震主体部分 1142之间的嵌合连接。
107.通过上述设置,有效的保证了连接座部分1143与减震主体部分1142 的安装精度和安装稳定性,进而可以更加可靠的通过连接座部分1143与其他结构相连接。
108.在本实施方式中,连接座部分1143中间设置有贯穿其本体的通道,用于实现连接件(如螺栓)的穿过并与其姿态传感器单元122中与陀螺仪122a 相连接的连接支座相连接,从而实现惯导系统12与支承主体111的减震连接。
109.结合图3、图4、图7和图8所示,根据本发明的一种实施方式,在主体隔热层111b上开设有与底座部分1141外形相匹配的限位凹槽,且底座部分1141与支承主体111采用第一螺纹连接件相连接。在本实施方式中,沿竖直方向,减震座114在支承主体111的内的上下两侧分别设置,用于实现与惯导系统12在上下两侧的稳定安装。具体的,在惯导系统12的上下两侧分别设置有四个减震座114。在本实施方式中,由于底座部分1141是用于起到支撑作用的,进而其需要在硬质结构上进行连接,进而,其可直接承靠在支承主体111内侧壁的主体磁屏蔽层111a上,以实现与支承主体 111的稳定连接的同时,不破坏整体的屏蔽性能。
110.在本实施方式中,底座部分1141呈菱形结构,进而在主体隔热层111b 上用于安装底座部分1141的位置则相应的设置有与底座部分1141外形相匹配的限位凹槽。在本实施方式中,底座部分1141安装在该限位凹槽中后,则采用第一螺纹连接件将其与支承主体111固
定连接,具体的,沿支承主体111侧壁的厚度方向,第一螺纹连接件由外至内的方向穿过支承主体111 的侧壁与底座部分1141相互连接。在本实施方式中,在支承主体111的外侧壁上设置有用于第一螺纹连接件穿过的连接孔,第一螺纹连接件穿过该连接孔与底座部分1141相连接,并且为保证支承主体111内部的密封性,第一螺纹连接件与支承主体111承靠的位置之间还设置有密封件(如密封圈),实现了在安装位置的密封,进而对保证本发明内部的密封性有益。
111.结合图3、图4、图7和图8所示,根据本发明的一种实施方式,主体隔热层111b上与减震座114相对应的位置还设置有隔热遮盖垫111b1。在本实施方式中,隔热遮盖垫111b1中间位置与减震主体部分1142同轴的嵌套设置,其边缘位置与主体隔热层111b相互固定连接,用于封闭底座部分 1141。在本实施方式中,隔热遮盖垫111b1的材质与主体隔热层111b的材质是一致的。在另一种实施方式中,若在底座部分1141嵌入的主体隔热层 111b周围同样具有主体固定板111c时,可通过将隔热遮盖垫111b1的缘位置与主体固定板111c相互固定连接,以实现对底座部分1141的封闭。
112.如图2所示,根据本发明的一种实施方式,在支承主体111的外侧壁上还设置有安装凸台1111,从而使得整个外壳结构可以实现六面体标定的功能,使得采用本发明的重力仪可以实现现场标定,节省了设备准备时间,提高了环境适应性。
113.如图1所示,根据本发明的一种实施方式,本发明的跨平台捷联式动态重力仪可通过监控部分3采集重力测量系统1和外部观测部分2的输出结果并进行数据处理后获得最终的重力测量结果。具体的,通过跨平台捷联式动态重力仪上重力测量系统1的外壳体11采用螺栓或者滑轨与动态的载体相互连接,其中,外部观测部分2根据不同的测量环境和功能模块的工作状态进行组合,输出测量结果作为外部观测值与重力测量系统1内部的捷联式惯导系统12的结算结果通过监控部分3的接收并采用多传感器信息融合方法进行融合。得到当导航结果后进行重力异常解算和滤波,最终得到重力测量结果。
114.为进一步说明本发明的功能作用,对本发明在不同载体上时的工作流程作进一步详细说明。
115.如图9所示,根据本发明的一种实施方式,本发明的跨平台捷联式动态重力仪基于以下步骤进行船载组合导航,其中,外部观测部分2中功能模块采用gnss模块实现测量辅助,具体包括:
116.s11.捷联式重力测量系统1在船体系泊状态下进行摇摆对准并进行初始化;
117.s12.重力测量系统1中的惯导系统12进行纯惯导解算并输出解算结果;
118.s13.基于gnss模块并采用精确点定位方式(ppp方式)获取捷联式重力测量系统1的外部观测值;其中,外部观测值包括:重力测量系统1的位置和速度;
119.s14.监控部分3接收解算结果和外部观测值,并结合重力测量系统1 的误差方程作为状态方程构建卡尔曼滤波器进行误差估计;
120.s15.监控部分3基于卡尔曼滤波器获取的误差估计值反馈至惯导系统12 进行校正,得到高精度的姿态、速度、位置信息;
121.s16.基于获取的姿态、速度、位置信息对原始重力异常提取,对提取的原始重力异常进行低通滤波,并进行精度评估获取精确的重力异常。
122.如图9所示,根据本发明的一种实施方式,本发明的跨平台捷联式动态重力仪基于
以下步骤进行航空组合导航,其中,外部观测部分2中功能模块采用gnss模块实现测量辅助,具体包括:
123.s11.捷联式重力测量系统1在机场进行静态校正并采用静基座对准方式确定初始姿态角;
124.s12.重力测量系统1中的惯导系统12进行纯惯导解算并输出解算结果;
125.s13.基于gnss模块并采用dgnss差分定位方式获取捷联式重力测量系统1的外部观测值;其中,外部观测值包括:重力测量系统1的位置和速度;
126.s14.监控部分3接收解算结果和外部观测值,并结合捷联式重力测量系统1的误差方程作为状态方程构建卡尔曼滤波器进行误差估计;
127.s15.监控部分3基于卡尔曼滤波器获取的误差估计值反馈至惯导系统12 进行校正,得到高精度的姿态、速度、位置信息,
128.s16.基于获取的姿态、速度、位置信息对原始重力异常提取,对提取的原始重力异常进行低通滤波,并进行精度评估获取精确的重力异常。
129.如图9所示,根据本发明的一种实施方式,本发明的跨平台捷联式动态重力仪基于以下步骤进行车载组合导航,其中,外部观测部分2中功能模块采用gnss模块和激光测速仪模块实现测量辅助,具体包括:
130.s11.捷联式重力测量系统1在车载环境进行静态校正并采用dgnss差分定位方式获取捷联式重力测量系统1的位置信息进行静基座对准;
131.s12.重力测量系统1中的惯导系统12进行纯惯导解算并输出解算结果;
132.s13.基于gnss模块并采用dgnss差分定位方式获取捷联式重力测量系统1的第一外部观测值,以及基于激光测速仪模块获取第二外部观测值;其中,第一外部观测值包括:捷联式重力测量系统1的位置和第一速度,第二外部观测值包括:捷联式重力测量系统1的第二速度;
133.s14.监控部分3接收解算结果、第一外部观测值和第二外部观测值进行多源数据融合,得到高精度的姿态、速度、位置信息,
134.s15.基于获取的姿态、速度、位置信息对原始重力异常提取,对提取的原始重力异常进行低通滤波,并进行精度评估获取精确的重力异常。
135.如图9所示,根据本发明的一种实施方式,本发明的跨平台捷联式动态重力仪基于以下步骤进行水下组合导航,其中,外部观测部分2中功能模块采用多普勒测速仪模块、水下超短基线定位模块、深度计模块的组合实现测量辅助,具体包括:
136.s11.捷联式重力测量系统1在水下环境中采用水下多普勒测速仪模块 (dvl)和水下超短基线定位模块(usbl)辅助进行动基座对准并确定初始信息;
137.s12.重力测量系统1中的惯导系统12进行纯惯导解算并输出解算结果;
138.s13.基于水下超短基线定位模块(usbl)获取的水平位置信息,基于水下多普勒测速仪模块(dvl)获取的速度信息,以及基于深度计模块(dj)获取的深度信息作为外部观测值;
139.s14.监控部分3接收解算结果和外部观测值进行多源数据融合,并采用卡尔曼滤波方法估计和补偿惯导系统12的误差,得到高精度的姿态、速度、位置信息;
140.s15.基于获取的姿态、速度、位置信息对原始重力异常提取,对提取的原始重力异
常进行低通滤波,并进行精度评估获取精确的重力异常。
141.根据本发明的一种实施方式,监控部分3根据以下公式进行原始重力异常提取:
[0142][0143]
式中,δg为扰动重力矢量的垂向分量;h为载体高度/深度(向上为正);ω为地球自转角速率;l为地理纬度;ve、vn分别为载体对地东速、北速;rm和rn分别为地球椭球子午圈和卯酉圈半径;为天向运动加速度;γ为正常重力值。
[0144]
在本实施方式中,原始重力异常包含大量高频噪声,有效信号集中在低频段,需采用低通滤波方法去除噪声,得到有效的重力测量结果;精度评估分为内符合精度评估和外符合精度评估。
[0145]
上述内容仅为本发明的具体方案的例子,对于其中未详尽描述的设备和结构,应当理解为采取本领域已有的通用设备及通用方法来予以实施。
[0146]
以上所述仅为本发明的一个方案而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1