一种火箭筒段基准刻线偏扭测量方法与流程
1.本发明涉及大型零部件测量领域,尤其涉及火箭筒段基准刻线偏扭测量方法。
背景技术:
2.火箭筒段具有一定的长度,长1000~3000mm,因重量及热变形等因素,筒段在生产时会产生一定的偏扭,该偏扭会对筒段与筒段之间的联接产生影响,因此在每次筒段联接前,需要对每个筒段的偏扭进行测量,当偏扭量不超过技术要求时,则可进行筒段与筒段的联接作业。
3.火箭筒段的偏扭通过测量筒段两端基准刻线的偏扭来确定。每根基准刻线为宽0.1~0.2mm、深0.1~0.2mm、长15~20mm的细长刻线。需要将筒段两端各四根基准刻线同时测出,并确定相互间的位置关系,火箭筒段两端基准刻线偏扭误差要求为
±
0.3mm。
技术实现要素:
4.为了解决上述技术问题,本专利设计出一套采用激光雷达、基准刻线测量引导装置为测量装置,结合空间点坐标换算算法来实现基准刻线偏扭的测量。
5.为了实现上述目的,本发明采用如下技术方案:
6.一种火箭筒段基准刻线偏扭测量方法,其特征在于,包括下述步骤:
7.步骤1,将左侧激光雷达1、右侧激光雷达2置于将被测量的火箭筒段6的左右两侧,获得左侧激光雷达1和右侧激光雷达2的坐标;
8.步骤2,将被测量的长度为lh的火箭筒段6的置于左侧激光雷达1、右侧激光雷达2之间的测量区域内,在火箭筒段6的基准刻线5的地方,将基准刻线测量引导装置3装在火箭筒段法兰盘7上,并使基准刻线测量引导装置3对齐基准刻线5;
9.步骤3,在基准刻线测量引导装置3上安装标准靶球4;
10.步骤4,通过左侧激光雷达1测量获得火箭筒段6左侧的标准靶球4坐标,通过右侧激光雷达2测量获得火箭筒段6右侧的标准靶球4坐标;
11.步骤5,测量获取的标准靶球4点坐标进行空间点坐标换算,测得火箭筒段两端基准刻线的位置关系,从而实现对基准刻线偏扭的测量。
12.进一步的是,在步骤1中,将左侧激光雷达1、右侧激光雷达2置于被测量火箭筒段的左右两侧,并固定测量位置,这两个固定测量位置通过相互标定,确定相互之间的位置关系。
13.进一步的是,在步骤1中,左侧激光雷达1的坐标为p0(x0,y0,z0),右侧激光雷达2的坐标为p1(x1,y1,z1)。
14.进一步的是,每条基准刻线5均配有一个基准刻线测量引导装置3,在每条基准刻线5的地方,将基准刻线测量引导装置3装在火箭筒段法兰盘7上,并在每个基准刻线测量引导装置3上安装标准靶球4。
15.进一步的是,在步骤5中,测量获取的标准靶球4点坐标通过polyworks,geomagic,
cyclone,realwork,或sa软件进行空间点坐标换算。
16.进一步的是,在步骤4中,获得火箭筒段6左侧的四个标准靶球4坐标,分别为p
l1
(x
l1
,y
l1
,z
l1
)、p
l2
(x
l2
,y
l2
,z
l2
)、p
l3
(x
l3
,y
l3
,z
l3
)、p
l4
(x
l4
,y
l4
,z
l4
);获得火箭筒段6右侧的四个标准靶球4坐标,分别为p
r1
(x
r1
,y
r1
,z
r1
)、p
r2
(x
r2
,y
r2
,z
r2
)、p
r3
(x
r3
,y
r3
,z
r3
)、p
r4
(x
r4
,y
r4
,z
r4
)。
17.进一步的是,在步骤5中,为了消除火箭筒段放置误差,首先以左侧点建立基于火箭筒段左侧的坐标系。
18.进一步的是,在步骤5中,以p
l1
(x
l1
,y
l1
,z
l1
)、p
l2
(x
l2
,y
l2
,z
l2
)、p
l3
(x
l3
,y
l3
,z
l3
)、p
l4
(x
l4
,y
l4
,z
l4
)拟合建立圆周c1,并获得圆周中心点c0(x0,y0,z0),圆周中心点为坐标原点,以圆周c1过圆周中心点的法线方向为z轴,以圆周中心点c0(x0,y0,z0)和点p
l1
(x
l1
,y
l1
,z
l1
)的连线方向为x轴,建立空间转换坐标系,将左侧四个点坐标转换为q
l1
(x
l1
,0,0)、q
l2
(x
l2
,y
l2
,0)、q
l3
(x
l3
,y
l3
,0)、q
l4
(x
l4
,y
l4
,0),理论上经过转换后的四个坐标点中,x
l2
≈0、x
l3
≈-x
l1
、y
l3
≈0、x
l4
≈0、y
l4
≈-y
l2
,右侧四个点则同步坐标转换为q
r1
(x
r1
,y
r1
,z
r1
)、q
r2
(x
r2
,y
r2
,z
r2
)、q
r3
(x
r3
,y
r3
,z
r3
)、q
r4
(x
r4
,y
r4
,z
r4
),则,左右两侧对应坐标点之间的位置差即偏扭为其中,i=1,2,3,4。
19.进一步的是,激光雷达采用激光相位式测量扫描。
20.进一步的是,激光雷达的水平扫描角度360度,垂直扫描角度270度,扫描精度0.07mm/10m内。
21.本发明的技术方案能够使得火箭筒段的基准刻线偏扭得到准确测量,该测量方法具有操作简单、通用性强、测量准确度高、测量稳定性高、工作可靠等优点,实用性与经济效益显著。
附图说明
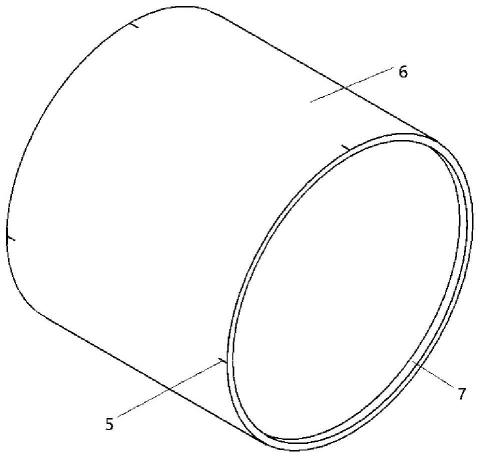
22.图1为火箭筒段基准刻线示意图;
23.图2为火箭筒段的基准刻线测量引导装置的安装示意图;
24.图3为本发明的火箭筒段基准刻线偏扭测量方法的示意图;
25.图4为测量点坐标换算示意图。
具体实施方式
26.本发明的具体实施方式结合附图说明如下:
27.为了清楚起见,对本发明中出现的术语进行解释。
28.火箭筒段:指火箭的某一舱段,包括了尾段、一级箱间段、二级箱间段、箱间段、后过渡段、一二级级间段。一级箱间段、二级箱间段、箱间段区别在于每种筒段的高度不同、直径不同。
29.基准刻线:指在火箭筒段加工时,刻在火箭筒段两侧端面处外筒体上的八根刻线。如图1所示
30.图1为火箭筒段基准刻线示意图。图1中分别示出了火箭筒段6、基准刻线5和火箭筒段法兰盘7。
31.图2为火箭筒段的基准刻线测量引导装置的安装示意图。参见图2,基准刻线测量引导装置3安装于火箭筒段法兰盘7的基准刻线5处,基准刻线测量引导装置3的靶座上安装有标准靶球4。
32.基准刻线测量引导装置3将细长的、不宜获取的基准刻线准确引导至便于测量的作为激光雷达靶球的标准靶球4上,每条基准刻线5可以均配有一个基准刻线测量引导装置3,可实现同时测量。
33.图3为本发明的火箭筒段基准刻线偏扭测量方法的示意图;参见图3,本发明的火箭筒段基准刻线偏扭测量方法涉及左侧激光雷达1、右侧激光雷达2、基准刻线测量引导装置3、标准靶球4、火箭筒段6、以及模拟测量线8。
34.激光雷达可以采用激光相位式测量扫描,水平扫描角度360度,垂直扫描角度270度,扫描精度0.07mm/10m内。激光雷达为主要测量设备,包括左侧激光雷达1、右侧激光雷达2,分别置于火箭筒段的两端,相隔距离为5~6m,用于扫描火箭筒段的两端。
35.测量获取的标准靶球4点坐标通过polyworks,geomagic,cyclone,realwork,或sa等软件进行空间点坐标换算,测得火箭筒段两端基准刻线的位置关系,从而实现对基准刻线偏扭的测量。
36.本发明的火箭筒段基准刻线偏扭测量方法的过程如下:
37.将左侧激光雷达1、右侧激光雷达2置于将被测量的火箭筒段6的左右两侧,并固定测量位置,这两个固定测量位置通过相互标定,确定相互之间的位置关系,左侧激光雷达1的坐标为p0(x0,y0,z0),右侧激光雷达2的坐标为p1(x1,y1,z1),以此建立统一的测量坐标系;
38.将被测量的长度为lh的火箭筒段6置于左侧激光雷达1、右侧激光雷达2之间的测量区域内(先放置激光雷达,再放筒段),并在每条基准刻线5的地方,将基准刻线测量引导装置3装在火箭筒段法兰盘7上,并使基准刻线测量引导装置3对齐基准刻线5;
39.在每个基准刻线测量引导装置3上安装标准靶球4;
40.通过左侧激光雷达1可以测量获得火箭筒段6左侧的四个标准靶球4坐标,分别为p
l1
(x
l1
,y
l1
,z
l1
)、p
l2
(x
l2
,y
l2
,z
l2
)、p
l3
(x
l3
,y
l3
,z
l3
)、p
l4
(x
l4
,y
l4
,z
l4
);
41.通过右侧激光雷达2可以测量获得火箭筒段6右侧的四个标准靶球4坐标,分别为p
r1
(x
r1
,y
r1
,z
r1
)、p
r2
(x
r2
,y
r2
,z
r2
)、p
r3
(x
r3
,y
r3
,z
r3
)、p
r4
(x
r4
,y
r4
,z
r4
);
42.图4为测量点坐标换算示意图。参见图4,本发明将测量获得的八个测量点p(p
l1
,p
l2
,p
l3
,p
l4
,p
r1
,p
r2
,p
r3
,p
r4
)通过polyworks,geomagic,cyclone,realwork,或sa等软件进行空间点坐标换算。为了消除火箭筒段放置误差,首先以左侧四个点建立基于火箭筒段左侧的坐标系。具体方法为,以p
l1
(x
l1
,y
l1
,z
l1
)、p
l2
(x
l2
,y
l2
,z
l2
)、p
l3
(x
l3
,y
l3
,z
l3
)、p
l4
(x
l4
,y
l4
,z
l4
)拟合建立圆周c1,并获得圆周中心点c0(x0,y0,z0)。圆周中心点为坐标原点,以圆周c1过圆周中心点的法线方向为z轴,以圆周中心点c0(x0,y0,z0)和点p
l1
(x
l1
,y
l1
,z
l1
)的连线方向为x轴,建立空间转换坐标系。在步骤5中,以p
l1
(x
l1
,y
l1
,z
l1
)、p
l2
(x
l2
,y
l2
,z
l2
)、p
l3
(x
l3
,y
l3
,z
l3
)、p
l4
(x
l4
,y
l4
,z
l4
)拟合建立圆周c1,并获得圆周中心点c0(x0,y0,z0),圆周中心点为坐标原点,以圆周c1过圆周中心点的法线方向为z轴,以圆周中心点c0(x0,y0,z0)和点p
l1
(x
l1
,y
l1
,z
l1
)的连线方向为x轴,建立空间转换坐标系,将左侧四个点坐标转换为q
l1
(x
l1
,0,0)、q
l2
(x
l2
,y
l2
,0)、q
l3
(x
l3
,y
l3
,0)、q
l4
(x
l4
,y
l4
,0),理论上经过转换后的四个坐标点中,x
l2
≈0、x
l3
≈-x
l1
、y
l3
≈0、x
l4
≈0、y
l4
≈-y
l2
,右侧四个点则同步坐标转换为q
r1
(x
r1
,y
r1
,z
r1
)、q
r2
(x
r2
,yr2
,z
r2
)、q
r3
(x
r3
,y
r3
,z
r3
)、q
r4
(x
r4
,y
r4
,z
r4
),则,左右两侧对应坐标点之间的位置差即偏扭为其中,i=1,2,3,4。
43.需要说明的是,上文只是对本发明进行示意性说明和阐述,本领域的技术人员应当明白,对本发明的任意修改和替换都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1