一种轮式编码器的分辨率校正方法及系统与流程
1.本发明涉及单舵轮agv技术领域,特别涉及一种轮式编码器的分辨率校正方法及系统。
背景技术:
2.随着agv的发展,agv应用的场景越来越丰富,从而agv小车对定位精度和跟踪精度的要求越来越高,轮式里程计是可以利用从轮式编码器获得的数据来估计物体位置随时间的变化而改变的方法,而准确的轮式里程计对于提高agv定位精度和跟踪精度是十分有利的。
3.在现有技术中,大多数的轮式编码器的分辨率是按照最初的设计参数来确定,随着单舵轮agv小车的长时间行走,轮子逐渐磨损,容易导致单舵轮agv小车上的轮式里程计的数据不准确,从而导致单舵轮agv小车跟踪精度和定位精度下降。
技术实现要素:
4.本发明的目的是提供一种轮式编码器的分辨率校正方法及系统,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
5.本发明解决其技术问题的解决方案是:提供一种轮式编码器的分辨率校正方法及系统。
6.根据本发明的第一方面的实施例,提供了一种轮式编码器的分辨率校正方法,应用于单舵轮agv小车,所述单舵轮agv小车上设有激光雷达和轮式编码器,包括以下步骤:
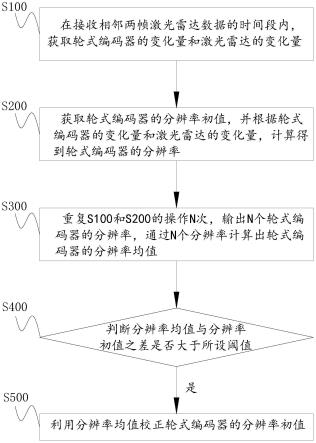
7.s100,在接收相邻两帧激光雷达数据的时间段内,获取轮式编码器的变化量和激光雷达的变化量;
8.s200,获取所述轮式编码器的分辨率初值,并根据所述轮式编码器的变化量和激光雷达的变化量,计算得到所述轮式编码器的分辨率;
9.s300,重复s100和s200的操作n次,输出n个所述轮式编码器的分辨率,通过n个所述分辨率计算出所述轮式编码器的分辨率均值;
10.s400,判断所述分辨率均值与分辨率初值之差是否大于所设阈值;
11.s500,若是,则利用所述分辨率均值校正所述轮式编码器的分辨率初值。
12.进一步,在s100中,所述在接收相邻两帧激光雷达数据的时间段内,获取轮式编码器的变化量和激光雷达的变化量具体包括:
13.s110,当接收到当前帧激光雷达数据时,获取当前时刻t的轮式编码器的第一信息l0,并根据所述当前帧激光雷达数据获得激光雷达的第一位置信息p0;
14.s120,当接收到下一帧激光雷达数据时,获取下一时刻t+1的轮式编码器的第二信息l1,并根据下一帧激光雷达数据获得激光雷达的第二位置信息p1;
15.s130,根据所述轮式编码器的第一信息l0和第二信息l1,得到轮式编码器的变化量δ
l
,以及根据所述激光雷达的第一位置信息p0和第二位置信息p1,得到激光雷达的变化量
δ
p
。
16.进一步,在s200中,所述获取所述轮式编码器的分辨率初值,并根据所述轮式编码器的变化量和激光雷达的变化量,计算得到所述轮式编码器的分辨率具体包括:
17.获取所述轮式编码器的分辨率初值scale(old),并根据所述轮式编码器的变化量δ
l
和激光雷达的变化量δ
p
,通过分辨率计算公式:
18.scale(new)=δ
p
/δ
l
*scale(old)
19.,计算得到轮式编码器的分辨率scale(new)。
20.进一步,在s400中,所述判断所述分辨率初值与分辨率均值之差是否大于所设阈值具体包括:
21.s410,对分辨率初值与分辨率均值进行差值计算,得到分辨率初值与分辨率均值之间的差值;
22.s420,将所述差值与所设阈值进行比较,判断所述差值是否大于所设阈值。
23.进一步,在s300中,所述重复s100和s200的操作n次,输出n个所述轮式编码器的分辨率,通过n个所述分辨率计算出所述轮式编码器的分辨率均值具体包括:
24.重复s100和s200的操作n次,输出n个所述轮式编码器的分辨率,通过n个所述分辨率,计算出所述轮式编码器的分辨率均值,其中,n取值为10。
25.根据本发明的第二方面的实施例,提供了一种轮式编码器的分辨率校正系统,应用于单舵轮agv小车,所述单舵轮agv小车上设有激光雷达和轮式编码器,包括:
26.变化量获取模块,用于在接收相邻两帧激光雷达数据的时间段内,获取轮式编码器的变化量和激光雷达的变化量;
27.分辨率计算模块,用于获取所述轮式编码器的分辨率初值,根据轮式编码器的变化量和激光雷达的变化量,计算得到所述轮式编码器的分辨率;
28.均值计算模块,用于重复所述变化量获取模块和分辨率计算模块的操作n次,输出n个所述分辨率,通过n个所述分辨率计算出所述轮式编码器的分辨率均值;
29.判断模块,用于判断所述分辨率均值与分辨率初值之差是否大于所设阈值;
30.校正模块,用于当所述分辨率均值与分辨率初值之差大于所设阈值时,则利用所述分辨率均值校正所述轮式编码器的分辨率初值。
31.进一步,所述变化量获取模块包括:
32.当前帧信息获取单元,用于当接收到当前帧激光雷达数据时,获取当前时刻t的轮式编码器的第一信息l0,并根据所述当前帧激光雷达数据获得激光雷达的第一位置信息p0;
33.下一帧信息获取单元,用于当接收到下一帧激光雷达数据时,获取下一时刻t+1的轮式编码器的第二信息l1,并根据下一帧激光雷达数据获得激光雷达的第二位置信息p1;
34.变化量计算单元,用于根据所述轮式编码器的第一信息l0和第二信息l1,得到轮式编码器的变化量δ
l
,以及根据所述激光雷达的第一位置信息00和第二位置信息p1,得到激光雷达的变化量δ
p
。
35.进一步,所述分辨率计算模块包括:
36.初值获取单元,用于获取所述轮式编码器的分辨率初值scale(old);
37.分辨率计算单元,用于根据所述轮式编码器的变化量δ
l
、激光雷达的变化量δ
p
和分辨率初值scale(old),通过分辨率计算公式:
38.scale(new)=δ
p
/δ
l
*scale(old)
39.,计算得到轮式编码器的分辨率scale(new)。
40.进一步,所述判断模块包括:
41.差值计算单元,用于对分辨率初值与分辨率均值进行差值计算,得到分辨率初值与分辨率均值之间的差值;
42.比较判断单元,用于将所述差值与所设阈值进行比较,判断所述差值是否大于所设阈值。
43.进一步,所述均值计算模块包括:
44.重复单元,用于重复所述变化量获取模块和分辨率计算模块的操作n次,输出n个所述分辨率;
45.均值计算单元,用于通过n个所述分辨率计算出所述轮式编码器的分辨率均值,其中,n取值为10。
46.本发明的有益效果是:通过轮式编码器的变化量和激光雷达的变化量,求取在相邻两帧激光雷达数据传输时间段内轮式编码器的分辨率,获取n个式编码器的分辨率,求其平均值,当分辨率均值与分辨率初值之差大于所设阈值时,用分辨率均值校正轮式编码器的分辨率初值。通过本发明能够有效地校正轮式编码器的分辨率,提高轮式编码器的准确率,解决由于单舵轮agv小车中的轮子磨损导致轮式里程计的数据不准确,从而导致单舵轮agv小车定位精度和跟踪精度变差的问题。
附图说明
47.图1是本发明一实施例提供的一种轮式编码器的分辨率校正方法的示意流程图;
48.图2是本发明另一实施例提供的一种轮式编码器的分辨率校正方法的示意性流程图。
具体实施方式
49.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本技术,而不能理解为对本发明的限制。
50.需要说明的是,虽然在系统示意图中进行了功能模块划分,但是在某些情况下,可以不同于系统中的模块划分或流程图中的顺序执行所示出或描述的步骤。说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。
51.本发明的描述中,需要说明的是,除非另有明确的限定,设置、安装、连接等词语应做广义的理解,所属技术领域的技术人员可以结合技术方案的具体内容合理确定上述词语在本发明的具体含义。
52.本发明应用于单舵轮agv小车,单舵轮agv小车与双舵轮agv小车相比,单舵轮agv小车的轮子磨损程度更严重,并且定位精度和跟踪的精度受影响更大。agv小车主要采用的是轮式里程计和激光雷达来进行定位或者跟踪,因此单舵轮agv小车上均会设置轮式编码器与激光雷达这个两种装置进行定位和跟踪。
53.根据本发明的第一方面的实施例,参照图1,在本发明的一些实施例中,一种轮式编码器的分辨率校正方法,包括以下步骤:
54.s100,在接收相邻两帧激光雷达数据的时间段内,获取轮式编码器的变化量和激光雷达的变化量。
55.在这一实施例中,当单舵轮agv小车在移动时,激光雷达采集移动数据,轮式编码器获取单舵轮的移动信息,单舵轮agv小车接收激光雷达传输的数据帧,其中,选取两帧数据帧,这两帧数据帧为相邻的数据帧。
56.在这接收到这相邻两帧数据之间的时间段内,获取轮式编码器的变化量,即轮式编码器在这段时间内得到的移动信息的变化量。在这接收到这相邻两帧数据之间的时间段内,获取激光雷达的变化量,即激光雷达在这段时间内通过移动数据得到的变化量。
57.s200,获取轮式编码器的分辨率初值,并根据轮式编码器的变化量和激光雷达的变化量,计算得到轮式编码器的分辨率。
58.在这一实施例中,获取在单舵轮agv小车中记录的轮式编码器的分辨率初始值。这个分辨率初始值可以理解为获取在轮子没有发生磨损之前的轮式编码器的分辨率。
59.通过s100中得到的轮式编码器的变化量、s100中得到的激光雷达的变化量以及分辨率初值,进行计算,处理得到轮式编码器在这接收到相邻两帧的激光雷达数据之间的时间段内的分辨率。
60.s300,重复s100和s200的操作n次,输出n个轮式编码器的分辨率,通过这n个分辨率计算出轮式编码器的分辨率均值。
61.在这一实施例中,循环重复s100以及s200这个两个步骤的操作n次,从而能够得到n个轮式编码器的分辨率。通过输出的n个分辨率求平均值,得到当前轮式编码器的分辨率均值。即,得到轮子磨损之后的轮式编码器的分辨率的值。
62.其中,这n个分辨率,可以是通过连续的相邻数据帧得到的,也可以通过不连续的相邻数据帧得到的。在优选的一些实施例中,这n个分辨率可以是通过连续的相邻数据帧得到的。
63.例如:在第一激光雷达数据帧与第二激光雷达数据帧之间的时间段内,得到第一个轮式编码器的分辨率;在第二激光雷达数据帧与第三激光雷达数据帧之间的时间段内,得到第二个轮式编码器的分辨率;....在第m激光雷达数据帧与第m+1激光雷达数据帧之间的时间段内,得到第n个轮式编码器的分辨率,这n个分辨率,可以是通过连续的相邻数据帧得到的。
64.在第一激光雷达数据帧与第二激光雷达数据帧之间的时间段内,得到第一个轮式编码器的分辨率;在第四激光雷达数据帧与第五激光雷达数据帧之间的时间段内,得到第二个轮式编码器的分辨率;....在第m激光雷达数据帧与第m+1激光雷达数据帧之间的时间段内,得到第n个轮式编码器的分辨率,这n个分辨率,可以是通过不连续的相邻数据帧得到的。
65.s400,判断分辨率均值与分辨率初值之差是否大于所设阈值;
66.在这一实施例中,判断在s300中得到的分辨率均值与在单舵轮agv小车中记录的轮式编码器的分辨率初值之间的差是否大于所设阈值。也就是说,根据轮子磨损之后的轮式编码器的分辨率与轮子磨损之前的轮式编码器的分辨率之间的差值,判断差值是否大于
所设阈值。其中,本实施例的判断结果不仅能够确定是否要对轮式编码器的分辨率进行修正,也能够通过数据得出单舵轮agv小车中的轮子的磨损程度。
67.s500,若是,则利用分辨率均值校正轮式编码器的分辨率初值。
68.在这一实施例中,得到分辨率均值与分辨率初值之间的差值,当两者的差值大于所设阈值时。即,轮子磨损之后的轮式编码器的分辨率与轮子磨损之前的轮式编码器的分辨率之间的区别过大,则可以认为单舵轮agv小车中的轮子的磨损会影响定位精度。若仍采用磨损前的分辨率,即仍采用分辨率初值,会大大影响定位精度和跟踪精度。因此,采用分辨率均值来校正分辨率初值,即,采用轮子磨损之后的轮式编码器的分辨率来代替轮子磨损之前的轮式编码器的分辨率。
69.通过上述方法能够有效地校正轮式编码器的分辨率,提高轮式编码器的准确率,解决由于agv小车中的轮子磨损导致轮式里程计的数据不准确,从而导致单舵轮agv小车定位精度和跟踪精度变差的问题。
70.参照图2,图2为图1中s100的细化流程一个实施例的流程图,该s100包括但是不限于s110、s120和s130,在s100中,获取变化量的具体过程包括以下步骤:
71.s110,当接收到当前帧的激光雷达数据时,获取当前时刻t的轮式编码器的第一信息l0,并根据当前帧激光雷达数据获得激光雷达的第一位置信息p0。
72.在这一实施例中,当单舵轮agv小车在移动时,激光雷达采集移动数据,轮式编码器获取单舵轮的移动信息。当接收到一帧激光雷达采集到的数据时,在这一时刻t,获取轮式编码器得到的单舵轮agv小车的移动信息,即,第一信息l0。以及根据接收到的激光雷达采集的这一帧数据帧,基于激光slam定位算法,获得单舵轮agv小车此时第一位置信息p0。其中,第一位置信息p0为通过激光雷达对单舵轮agv小车进行定位得到的信息,即,单舵轮agv小车在这一时刻t的位置信息。
73.需要说明的是,在这一时刻t时,轮式编码器获取的信息能够与激光雷达获取的位置信息对应得上的,两者均获取同一个地点同一时间的信息。
74.通过本实施例的方法采集有利于减少数据获取和计算变化量的细微误差,提高了得到的轮式编码器的分辨率的准确率。
75.s120,当接收到下一帧激光雷达数据时,获取下一时刻t+1的轮式编码器的第二信息l1,并根据下一帧激光雷达数据获得激光雷达的第二位置信息p1。
76.在这一实施例中,当单舵轮agv小车在移动时,激光雷达采集移动数据,轮式编码器获取单舵轮的移动信息。当接收到下一帧激光雷达采集到的数据时,其中,下一帧的数据与s110中的当前帧数据为相邻帧,即,接收到s110中的数据帧之后就接收本实施例中的数据帧。
77.在这一时刻t+1,获取轮式编码器得到的单舵轮的移动信息,即,第二信息l1。当接收到下一帧激光雷达采集到的数据时,在这一时刻t+1,根据接收到的激光雷达采集的数据,基于激光slam定位算法,获得单舵轮agv小车此时第二位置信息p1。其中,第二位置信息p1为通过激光雷达对单舵轮agv小车进行定位得到的信息,即,单舵轮agv小车在这一时刻t+1的位置信息。
78.需要说明的是,在这一时刻t+1时,轮式编码器获取的信息能够与激光雷达获取的位置信息对应得上的,两者均获取同一个地点同一时间的信息。
79.通过本实施例的方法采集有利于减少数据获取和计算变化量的细微误差。提高了得到的轮式编码器的分辨率的准确率。
80.s130,根据轮式编码器的第一信息l0和第二信息l1,得到轮式编码器的变化量δ
l
,以及根据激光雷达的第一位置信息p0和第二位置信息p1,得到激光雷达的变化量δ
p
。
81.在这一实施例中,通过s110中得到的第一信息l0和第一位置信息p0,以及s120中的得到的第二信息l1和第二位置信息p1。将第一信息l0与第二信息l1进行差值计算,得到s100中所说的轮式编码器的变化量δ
l
。也就是说,在接收到当前帧的激光雷达数据至接收到下一帧的激光雷达数据这个时间段内,即,在当前时刻t至下一时刻t+1这个时间段内,得到轮式编码器检测到单舵轮agv小车移动的变化量。
82.将第一位置信息p0与第二位置信息p1进行差值计算,得到s100中所说的激光雷达的变化量δ
p
。也就是说,在接收到当前帧的激光雷达数据直至接收到下一帧的激光雷达数据这个时间段内,即,在当前时刻t至下一时刻t+1这个时间段内,得到激光雷达检测到单舵轮agv小车移动的变化量。
83.在本发明的一些实施例中,在s200中,获取在单舵轮agv小车中记录的分辨率初值,并根据s100中得到的轮式编码器的变化量和激光雷达的变化量,计算分辨率的过程具体包括如下:
84.获取轮式编码器的分辨率初值,即,获取在单舵轮agv小车中记录的分辨率初始值,可以理解为获取在轮子没有发生磨损之前的轮式编码器的分辨率。
85.通过s100得到的轮式编码器的变化量δ
l
、激光雷达的变化量δ
p
以及在单舵轮agv小车中记录的分辨率初值,通过分辨率计算公式:
86.scale(new)=δ
p
/δ
l
*scale(old)
87.,代入计算得到在接收到当前帧的激光雷达数据至接收到下一帧的激光雷达数据这个时间段内,即,在当前时刻t至下一时刻t+1这个时间段内的轮式编码器的分辨率scale(new)。在这段时间内,单舵轮agv小车移动了一定的距离,激光雷达和轮式编码器均对这段距离进行定位,并分别获取这段距离的位置变化量δ
p
、δ
l
。通过两个变化量求比值,并将得到的比值乘以分辨率的初值,得到在这段时间内且在这段距离上,轮式编码器的分辨率。
88.在理想情况下,对于同时间段同一段移动距离,激光雷达和轮式编码器得到的变化量应该是一致的,即,其比值接近为1。但由于单舵轮发生了磨损,导致轮式编码器得到信息并不准确,通过分辨率计算公式能够得知对于同时间段同一段移动距离,磨损后的轮式编码器与磨损后的轮式编码器之间的关系。
89.在本发明的一些实施例中,在s300中,重复s100和s200的步骤n次,就能得到n个分辨率,并通过这n个分辨率计算出轮式编码器的分辨率均值具体包括如下:
90.重复s100和s200操作10次,输出10个轮式编码器的分辨率,求这10个分辨率的平均值,从而得到轮子磨损之后编码器的分辨率。
91.在这一实施例中,n的取值为10,循环重复s100以及s200的操作10次。例如:在接收第一激光雷达数据帧与接收第二激光雷达数据帧之间的时间段内,通过s100和s200计算得到第一个分辨率scale(1);在接收第二激光雷达数据帧与接收第三激光雷达数据帧之间的时间段内,通过s100和s200计算得到第二个分辨率scale(2);....在接收第十激光雷达数据帧与接收第十一激光雷达数据帧之间的时间段内,通过s100和s200计算得到第十个分辨
率scale(10)。通过上述循环重复步骤,得到10个轮式编码器的分辨率。通过求这10个分辨率的平均值,得到当前轮式编码器的分辨率均值。这分辨率均值可以认为单舵轮agv小车的轮子发生磨损之后编码器的分辨率。
92.需要说明的,n取值为10为本实施例优选的一个取值。当n取值过小,得到的分辨率均值不够具有说服力,可能会出现一个特殊的分辨率,导致数值不准确。当n取值过大,得到的分辨率均值会接近于分辨率初值,因此,n取值为10为本实施例优选的一个取值。
93.在本发明的一些实施例中,在s400中,判断分辨率初值与分辨率均值之差是否大于所设阈值具体包括以下步骤:
94.s410,对在s200中得到的轮式编码器的分辨率初值,以及在s300中得到的轮式编码器的分辨率均值进行差值计算,得到分辨率均值和分辨率初值之间的差值。
95.在这一实施例中,将分辨率均值和分辨率初值进行作差,从而确认轮子磨损之前的分辨率和轮子磨损之后的分辨率之间的差别,通过得到的差值也能体现出单舵轮agv小车的轮子的磨损程度,当差值太大,则可以认为单舵轮agv小车的轮子的磨损程度严重。
96.s420,将s410得到的差值与所设阈值作比较,判断差值是否大于所设阈值。
97.在这一实施例中,分辨率均值和分辨率初值的差值与所设阈值进行对比,当差值大于所设阈值时,则可以认为单舵轮agv小车的轮子的磨损过大,会导致单舵轮agv小车上的轮式里程计的数据不准确,从而导致单舵轮agv小车跟踪精度和定位精度下降。因此,通过s500将分辨率均值校正分辨率初值,即将磨损后的轮式编码器分辨率代替磨损前的轮式编码器分辨率。从而解决单舵轮agv小车跟踪精度和定位精度下降的问题。
98.需要说明的是,当差值小于所设阈值时,则可以认为单舵轮agv小车的轮子的磨损情况不严重,此时,可以用分辨率初值作为定位参数,也可以使用分辨率均值作为定位参数,校正分辨率初值。
99.根据本发明的第二方面的实施例,在本发明的一些实施例中,一种轮式编码器的分辨率校正系统包括:变化量获取模块、分辨率计算模块、均值计算模块、判断模块以及校正模块。
100.变化量获取模块用于在接收到相邻两帧数据之间的时间段内,获取轮式编码器的变化量,以及获取激光雷达的变化量,其中,这数据帧为当单舵轮agv小车在移动时,激光雷达采集的移动数据帧。
101.分辨率计算模块获取记录在单舵轮agv小车中的轮式编码器的分辨率初值。接收变化量获取模块发送的激光雷达的变化量和轮式编码器的变化量。通过轮式编码器的变化量、激光雷达的变化量以及分辨率初值,计算得到轮式编码器在接收到相邻两帧数据之间的时间段内的分辨率。
102.均值计算模块用于重复变化量获取模块和分辨率计算模块的操作n次。分辨率计算模块输出n个分辨率至均值计算模块,通过n个分辨率计算出轮式编码器的分辨率均值。通过输出的n个分辨率求平均值,得到当前轮式编码器的分辨率均值。即,得到轮子磨损之后的轮式编码器的分辨率的值。
103.其中,这n个分辨率,可以是通过连续的相邻数据帧得到的,也可以通过不连续的相邻数据帧得到的。在优选的一些实施例中,这n个分辨率可以是通过连续的相邻数据帧得到的。
104.判断模块接收均值计算模块输出的分辨率均值,以及接收分辨率计算模块发送的分辨率初值。将分辨率均值与分辨率初值作差,判断分辨率均值与分辨率初值之差是否大于所设阈值。
105.也就是说,根据轮子磨损之后的轮式编码器的分辨率与轮子磨损之前的轮式编码器的分辨率之间的差值,判断差值是否大于所设阈值,从而也能够判断出舵轮的磨损程度。
106.校正模块接收判断模块发送的分辨率均值与分辨率初值之差大于所设阈值的判断结果时,则利用分辨率均值校正分辨率初值。
107.在本实施例中,变化量获取模块在接收到相邻两帧数据之间的时间段内,获取轮式编码器的变化量,以及获取激光雷达的变化量。分辨率计算模块根据两者的变化量,得到在这个时间段内轮式编码器的分辨率。均值计算模块获取n个式编码器的分辨率,求其平均值。
108.判断模块断分辨率均值与分辨率初值之差是否大于所设阈值。若是,校正模块用分辨率均值校正分辨率初值。本发明能够有效地校正轮式编码器的分辨率,提高轮式编码器的准确率,解决由于单舵轮agv小车中的轮子磨损导致轮式里程计的数据不准确,从而导致单舵轮agv小车定位精度和跟踪精度变差的问题。
109.在本发明的一些实施例中,变化量获取模块包括:当前帧信息获取单元、下一帧信息获取单元和变化量计算单元。
110.当前帧信息获取单元的作用为:当单舵轮agv小车在移动时,激光雷达采集移动数据,轮式编码器获取单舵轮的移动信息。当接收到一帧激光雷达采集到的数据时,在这一时刻t,获取轮式编码器得到的单舵轮的移动信息,即,第一信息l0。当接收到一帧激光雷达采集到的数据时,在这一时刻t,根据接收到的激光雷达采集的数据,基于激光slam算法,获得第一位置信息p0,第一位置信息p0为通过激光雷达对单舵轮agv小车进行定位得到的信息,即,单舵轮agv小车在这一时刻t的位置信息。
111.下一帧信息获取单元的作用为:单舵轮agv小车在移动时,激光雷达采集移动数据,轮式编码器获取单舵轮的移动信息。当接收到下一帧激光雷达采集到的数据时,其中,下一帧的数据与s110中的当前帧数据为相邻帧,即,接收到s110中的数据帧之后就接收本实施例中的数据帧。
112.在这一时刻t+1,获取轮式编码器得到的单舵轮的移动信息,即,第二信息l1。当接收到下一帧激光雷达采集到的数据时,在这一时刻t+1,根据接收到的激光雷达采集的数据,基于激光slam算法,获得第二位置信息p1,第二位置信息p1为通过激光雷达对单舵轮agv小车进行定位得到的信息,即,单舵轮agv小车在这一时刻t+1的位置信息。
113.变化量计算单元的作用为:接收当前帧信息获取单元发送的第一信息l0和第一位置信息p0,以及接收下一帧信息获取单元发送的第二信息l1和第二位置信息p1。
114.将第一位置信息p0与第二位置信息p1进行差值计算,得到激光雷达的变化量δ
p
。将第一信息l0和第二信息l1进行差值计算,得到轮式编码器的变化量δ
l
,并将激光雷达的变化量δ
p
与轮式编码器的变化量δ
l
发送至分辨率计算模块中。
115.在本发明的一些实施例中,分辨率计算模块包括:初值获取单元和分辨率计算单元。
116.初值获取单元用于获取记录在单舵轮agv小车中的轮式编码器的分辨率初值,并
将分辨率初值发送至分辨率计算单元。
117.分辨率计算单元作用在于:接收变化量计算单元发送的激光雷达的变化量δ
p
与轮式编码器的变化量δ
l
,以及接收初值获取单元发送的分辨率初值。根据轮式编码器的变化量δ
l
、激光雷达的变化量δ
p
以及分辨率初值scale(old),通过分辨率计算公式:
118.scale(new)=δ
p
/δ
l
*scale(old)
119.,代入计算得到在接收到当前帧的激光雷达数据至接收到下一帧的激光雷达数据这个时间段内,即,在当前时刻t至下一时刻t+1这个时间段内的轮式编码器的分辨率scale(new)。并将这一个时间段内的轮式编码器的分辨率scale(new)发送至均值计算模块。
120.在本发明的一些实施例中,均值计算模块包括:重复单元和均值计算单元。
121.重复单元作用在于:重复变化量获取模块和分辨率计算模块的操作n次,接收分辨率计算单元发送的n个分辨率,将这n个分辨率输出至均值计算单元中,其中n取值为10。
122.例如:在接收第一激光雷达数据帧与接收第二激光雷达数据帧之间的时间段内,通过变化量获取模块和分辨率计算模块计算得到第一个分辨率scale(1),重复单元接收分辨率计算单元发送第一个分辨率scale(1),并再次让变化量获取模块和分辨率计算模块运行操作;在接收第二激光雷达数据帧与接收第三激光雷达数据帧之间的时间段内,通过s100和s200计算得到第二个分辨率scale(2),重复单元接收分辨率计算单元发送第二个分辨率scale(2),并再次让变化量获取模块和分辨率计算模块运行操作;....在接收第m激光雷达数据帧与接收第m+1激光雷达数据帧之间的时间段内,通过s100和s200计算得到第n个分辨率scale(n),重复单元接收分辨率计算单元发送第n个分辨率scale(n),得到n个轮式编码器的分辨率。将这n个分辨率输出至均值计算单元中。
123.均值计算单元作用在于:接收重复单元发送的n个分辨率,并对这n个分辨率求平均值,得到当前轮式编码器的分辨率均值。即,得到轮子磨损之后的轮式编码器的分辨率的值。
124.需要说明的,n取值为10为本实施例优选的一个取值。当n取值过小,得到的分辨率均值不够具有说服力,可能会出现一个特殊的分辨率,导致数值不准确。当n取值过大,得到的分辨率均值会接近于分辨率初值,因此,n取值为10为本实施例优选的一个取值。
125.在本发明的一些实施例中,判断模块包括:差值计算单元和比较判断单元。
126.差值计算单元作用在于:接收均值计算单元输出的轮式编码器的分辨率均值,以及接收分辨率计算单元发送的轮式编码器的分辨率初值。将分辨率均值与分辨率初值作差,并把差值发送至比较判断单元中。
127.根据差值能够确认轮子磨损之前的分辨率和轮子磨损之后的分辨率之间的差别,通过得到的差值也能体现出单舵轮agv小车的轮子的磨损程度,当差值太大,则可以认为单舵轮agv小车的轮子的磨损程度严重。
128.比较判断单元作用在于:接收差值计算单元发送的差值,并将得到的差值与所设阈值进行对比,当差值大于所设阈值时,则可以认为单舵轮agv小车的轮子的磨损过大。将当差值大于所设阈值时的判断结果发送至校正模块中。
129.需要说明的是,当差值小于所设阈值时,则可以认为单舵轮agv小车的轮子的磨损情况不严重,此时,可以用分辨率初值作为定位参数,也可以使用分辨率均值作为定位参数,校正分辨率初值。
130.以上对本发明的较佳实施方式进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做出种种的等同变型或替换,这些等同的变型或替换均包含在本技术权利要求所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1