基于激光雷达的路面生成方法、装置、介质、设备及车辆与流程
本技术涉及地图处理,具体而言,涉及一种基于激光雷达的路面生成方法、装置、介质、设备及车辆。
背景技术:
1、电子地图,也称即数字地图,是利用计算机技术,以数字方式存储和查阅的地图。生成电子地图的关键步骤之一是生成路面。目前生成路面的主要方法包括:先获取包括多个相机位姿和多个车道线的矢量语义地图,再将相机位姿对应的对地参数向量与地面的交点和对车道线的采样点生成路面点云,最后通过对路面点云进行拟合生成路面。其中,相机位姿为对应视频帧图像被采集时相机的位姿,相机位姿的获取方法主要包括:从各视频帧图像中提取多个特征,并通过对图像间进行特征匹配的方式求解相机位姿。然而,当因为天气等原因导致视频帧图像质量较低时,会大大影响特征匹配的精度,从而导致获取的相机位姿精度较低,进而使得最终生成的路面精度较低。
技术实现思路
1、本技术提供了一种基于激光雷达的路面生成方法、装置、介质、设备及车辆,能够提高路面生成的精度。
2、具体的技术方案如下:
3、第一方面,本技术实施例提供了一种基于激光雷达的路面生成方法,所述方法包括:
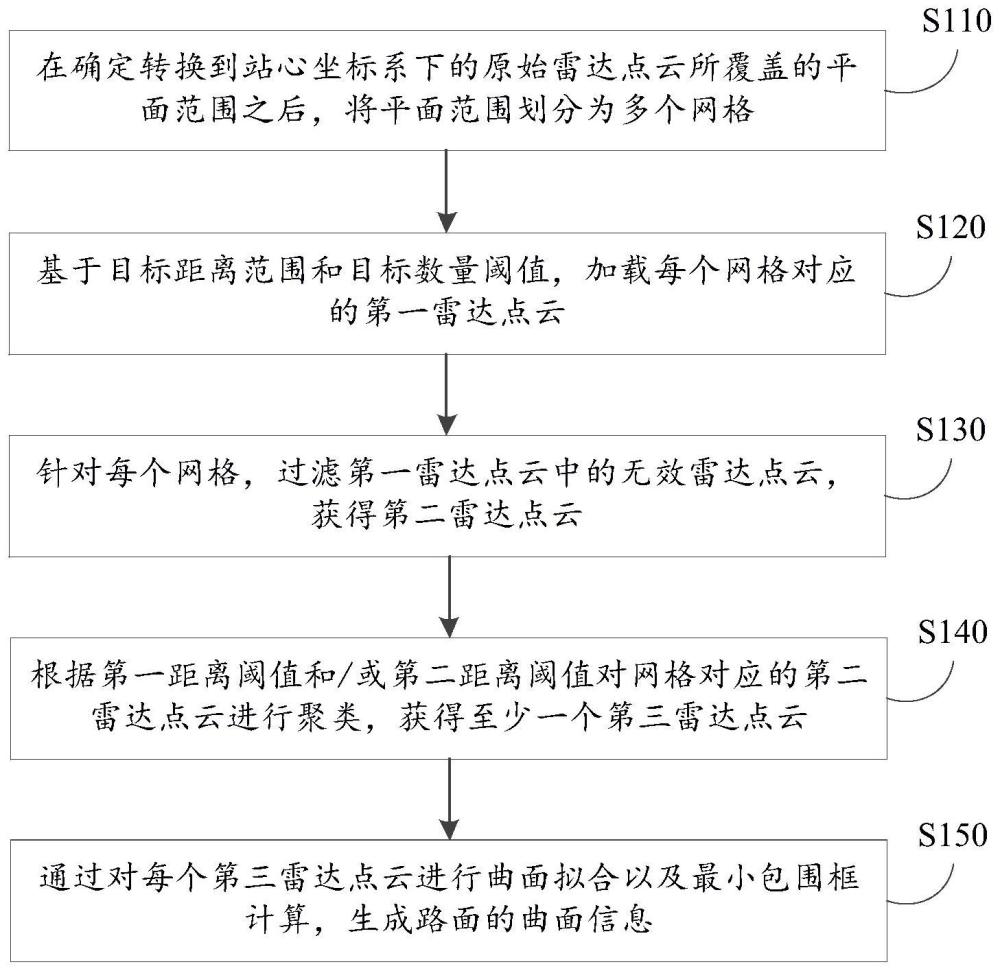
4、在确定转换到站心坐标系下的原始雷达点云所覆盖的平面范围之后,将所述平面范围划分为多个网格;
5、基于目标距离范围和目标数量阈值,加载每个所述网格对应的第一雷达点云,其中,所述第一雷达点云包括至少一帧所述原始雷达点云;
6、针对每个所述网格,过滤所述第一雷达点云中的无效雷达点云,获得第二雷达点云,其中,所述无效雷达点云包括位于基于所述网格确定的目标区域外的所述第一雷达点云,所述目标区域包括在将所述网格拓宽预设距离后获得的区域;
7、根据第一距离阈值和/或第二距离阈值对所述网格对应的第二雷达点云进行聚类,获得至少一个第三雷达点云,其中,所述第一距离阈值为所述站心坐标系中x轴和y轴组成的平面对应的距离阈值,所述第二距离阈值为所述站心坐标系中z轴对应的距离阈值;
8、通过对每个所述第三雷达点云进行曲面拟合以及最小包围框计算,生成路面的曲面信息。
9、通过上述方案可知,本技术实施例可以先将站心坐标系下的原始雷达点云所覆盖的平面范围划分为多个网格,加载每个网格对应的第一雷达点云,再过滤每个网格对应的第一雷达点云中的无效雷达点云获得第二雷达点云,通过对第二雷达点云进行聚类获得至少一个第三雷达点云,最后对第三雷达点云进行曲面拟合和最小包围框计算,生成路面的曲面信息,而不再依赖相机位姿,从而不会存在因特征匹配不准而导致相机位姿不准,进而影响路面生成精度的问题,即本技术实施例可以通过直接对激光雷达生成的原始雷达点云进行处理生成路面的曲面信息,由此提高了路面生成的精度。
10、在第一方面的第一种可能的实现方式中,在时间戳、激光雷达原点的位置与一帧原始雷达点云三者之间具有一一对应关系的情况下,所述基于目标距离范围和目标数量阈值,加载每个所述网格对应的第一雷达点云,包括:
11、针对每个所述网格,从每个所述时间戳对应的激光雷达原点的位置中,查找位于所述网格对应的所述目标距离范围内的所述激光雷达原点的位置,其中,所述时间戳为所述激光雷达生成每帧原始雷达点云时的时间点;
12、在查找到的位置的数量大于或者等于所述目标数量阈值的情况下,将距离所述网格的中心点最近的所述目标数量阈值个所述位置,所对应的所述原始雷达点云确定为所述网格对应的所述第一雷达点云;
13、在查找到的位置的数量小于所述目标数量阈值的情况下,将查找到的位置所对应的原始雷达点云确定为所述网格对应的所述第一雷达点云;
14、加载每个所述网格对应的所述第一雷达点云。
15、通过上述方案可知,本技术实施例可以预先确定时间戳、激光雷达原点的位置与一帧原始雷达点云三者之间的映射关系,再基于该映射关系,针对每个网格,从每个时间戳对应的激光雷达原点的位置中,查找位于该网格对应的目标距离范围内的激光雷达原点的位置,并根据位置的数量确定并加载每个网格对应的第一雷达点云,从而可以全面地获得每个网格所包含的所有雷达点云,避免产生遗漏。
16、在第一方面的第二种可能的实现方式中,在所述通过对每个所述第三雷达点云进行曲面拟合以及最小包围框计算,生成路面的曲面信息之前,所述方法还包括:
17、在所述第三雷达点云的数量大于或者等于第一点数阈值的情况下,针对每个所述第三雷达点云,将所述站心坐标系的原点平移到所述第三雷达点云的中心;
18、随机抽取坐标原点平移后的所述第三雷达点云中预设数量的点作为第一点集,并将所述第一点集拟合成第一平面;
19、计算所述坐标原点平移后的所述第三雷达点云中除所述第一点集外的每个点到所述第一平面的距离;
20、将所述距离小于或者等于第三距离阈值的点添加到所述第一点集后,获得第二点集,并将所述第二点集拟合成第二平面;
21、继续计算所述坐标原点平移后的所述第三雷达点云中除所述第二点集外的每个点到所述第二平面的距离,直至达到目标迭代次数后,获得目标平面;
22、过滤所述坐标原点平移后的所述第三雷达点云中,与所述目标平面的距离大于所述第三距离阈值的点,获得过滤后的所述第三雷达点云。
23、通过上述方案可知,本技术实施例可以通过随机抽取拟合加迭代的方式获得最终的目标平面,并过滤掉距离该目标平面距离较远的点,从而使得足够多的第三雷达点云中的点均在一个平面上,进而可以提高基于第三雷达点云进行曲面拟合所生成路面的精度和平滑度。
24、在第一方面的第三种可能的实现方式中,所述通过对每个所述第三雷达点云进行曲面拟合以及最小包围框计算,生成路面的曲面信息,包括:
25、在过滤后的所述第三雷达点云的点数与过滤前的所述第三雷达点云的点数的比例大于或者等于目标比例阈值,且所述目标平面的水平度大于或者等于目标水平度阈值的情况下,通过对所述第三雷达点云进行曲面拟合以及最小包围框计算,生成路面的曲面信息。
26、通过上述方案可知,在对第三雷达点云过滤后,本技术实施例只有在过滤后的第三雷达点云的点数与过滤前的第三雷达点云的点数的比例大于或者等于目标比例阈值,且目标平面的水平度大于或者等于目标水平度阈值的情况下,才对第三雷达点云进行曲面拟合以及最小包围框计算,从而可以保证足够多的第三雷达点云可以用于曲面拟合,而避免因第三雷达点云点数太少,导致最终拟合出的曲面平滑度和准确较低。
27、在第一方面的第四种可能的实现方式中,所述根据第一距离阈值和/或第二距离阈值对所述网格对应的第二雷达点云进行聚类,获得至少一个第三雷达点云,包括:
28、在所述网格对应的所述第二雷达点云中点数大于或者等于第二点数阈值的情况下,根据所述第一距离阈值和/或所述第二距离阈值对所述网格对应的所述第二雷达点云进行聚类,获得至少一个第三雷达点云。
29、通过上述方案可知,本技术实施例只有在第二雷达点云中点数足够多时,才进行聚类操作,从而提高对该网格曲面拟合的平滑度和准确度,而在第二雷达点云中点数比较少时,则可以忽略对应的网格,不对其进行聚类,以避免影响整体的路面精度和平滑度。
30、在第一方面的第五种可能的实现方式中,在通过对每个所述第三雷达点云进行曲面拟合以及最小包围框计算,生成路面的曲面信息之后,所述方法还包括:
31、将所述路面的曲面信息以json格式进行保存,其中,所述路面的曲面信息包括二次曲面参数和最小包围框的顶点坐标。
32、通过上述方案可知,本技术实施例在通过对每个第三雷达点云进行曲面拟合以及最小包围框计算,生成路面的曲面信息之后,可以将路面的曲面信息以json格式进行保存,以减少曲面信息的数据量,节省存储空间。
33、第二方面,本技术实施例提供了一种基于激光雷达的路面生成装置,所述装置包括:
34、划分单元,用于在确定转换到站心坐标系下的原始雷达点云所覆盖的平面范围之后,将所述平面范围划分为多个网格;
35、加载单元,用于基于目标距离范围和目标数量阈值,加载每个所述网格对应的第一雷达点云,其中,所述第一雷达点云包括至少一帧所述原始雷达点云;
36、过滤单元,用于针对每个所述网格,过滤所述第一雷达点云中的无效雷达点云,获得第二雷达点云,其中,所述无效雷达点云包括位于基于所述网格确定的目标区域外的所述第一雷达点云,所述目标区域包括在将所述网格拓宽预设距离后获得的区域;
37、聚类单元,用于根据第一距离阈值和/或第二距离阈值对所述网格对应的第二雷达点云进行聚类,获得至少一个第三雷达点云,其中,所述第一距离阈值为所述站心坐标系中x轴和y轴组成的平面对应的距离阈值,所述第二距离阈值为所述站心坐标系中z轴对应的距离阈值;
38、生成单元,用于通过对每个所述第三雷达点云进行曲面拟合以及最小包围框计算,生成路面的曲面信息。
39、在第二方面的第一种可能的实现方式中,所述加载单元,包括:
40、查找模块,用于在时间戳、激光雷达原点的位置与一帧原始雷达点云三者之间具有一一对应关系的情况下,针对每个所述网格,从每个所述时间戳对应的激光雷达原点的位置中,查找位于所述网格对应的所述目标距离范围内的所述激光雷达原点的位置,其中,所述时间戳为所述激光雷达生成每帧原始雷达点云时的时间点;
41、确定模块,用于在查找到的位置的数量大于或者等于所述目标数量阈值的情况下,将距离所述网格的中心点最近的所述目标数量阈值个所述位置,所对应的所述原始雷达点云确定为所述网格对应的所述第一雷达点云;在查找到的位置的数量小于所述目标数量阈值的情况下,将查找到的位置所对应的原始雷达点云确定为所述网格对应的所述第一雷达点云;
42、加载模块,用于加载每个所述网格对应的所述第一雷达点云。
43、在第二方面的第二种可能的实现方式中,所述装置还包括:
44、平移单元,用于在所述通过对每个所述第三雷达点云进行曲面拟合以及最小包围框计算,生成路面的曲面信息之前,在所述第三雷达点云的数量大于或者等于第一点数阈值的情况下,针对每个所述第三雷达点云,将所述站心坐标系的原点平移到所述第三雷达点云的中心;
45、抽取单元,用于随机抽取坐标原点平移后的所述第三雷达点云中预设数量的点作为第一点集,并将所述第一点集拟合成第一平面;
46、计算单元,用于计算所述坐标原点平移后的所述第三雷达点云中除所述第一点集外的每个点到所述第一平面的距离;
47、添加单元,用于将所述距离小于或者等于第三距离阈值的点添加到所述第一点集后,获得第二点集,并将所述第二点集拟合成第二平面;
48、所述计算单元,用于继续计算所述坐标原点平移后的所述第三雷达点云中除所述第二点集外的每个点到所述第二平面的距离,直至达到目标迭代次数后,获得目标平面;
49、所述过滤单元,还用于过滤所述坐标原点平移后的所述第三雷达点云中,与所述目标平面的距离大于所述第三距离阈值的点,获得过滤后的所述第三雷达点云。
50、在第二方面的第三种可能的实现方式中,所述生成单元,用于在过滤后的所述第三雷达点云的点数与过滤前的所述第三雷达点云的点数的比例大于或者等于目标比例阈值,且所述目标平面的水平度大于或者等于目标水平度阈值的情况下,通过对所述第三雷达点云进行曲面拟合以及最小包围框计算,生成路面的曲面信息。
51、在第二方面的第四种可能的实现方式中,所述聚类单元,用于在所述网格对应的所述第二雷达点云中点数大于或者等于第二点数阈值的情况下,根据所述第一距离阈值和/或所述第二距离阈值对所述网格对应的所述第二雷达点云进行聚类,获得至少一个第三雷达点云。
52、在第二方面的第四种可能的实现方式中,所述装置还包括:
53、保存单元,用于在通过对每个所述第三雷达点云进行曲面拟合以及最小包围框计算,生成路面的曲面信息之后,将所述路面的曲面信息以json格式进行保存,其中,所述路面的曲面信息包括二次曲面参数和最小包围框的顶点坐标。
54、本技术实施例提供的基于激光雷达的路面生成装置,可以先将站心坐标系下的原始雷达点云所覆盖的平面范围划分为多个网格,加载每个网格对应的第一雷达点云,再过滤每个网格对应的第一雷达点云中的无效雷达点云获得第二雷达点云,通过对第二雷达点云进行聚类获得至少一个第三雷达点云,最后对第三雷达点云进行曲面拟合和最小包围框计算,生成路面的曲面信息,而不再依赖相机位姿,从而不会存在因特征匹配不准而导致相机位姿不准,进而影响路面生成精度的问题,即本技术实施例可以通过直接对激光雷达生成的原始雷达点云进行处理生成路面的曲面信息,由此提高了路面生成的精度。
55、第三方面,本技术实施例提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如第一方面任一可能的实现方式所述的方法。
56、第四方面,本技术实施例提供了一种电子设备,电子设备包括:
57、一个或多个处理器;
58、所述处理器与存储装置耦合,所述存储装置用于存储一个或多个程序;
59、当一个或多个程序被一个或多个处理器执行,使得电子设备实现如第一方面任一可能的实现方式所述的方法。
60、第五方面,本技术实施例提供了一种车辆,车辆包含如第二方面任一可能的实现方式所述的装置,或者包含如第四方面所述的电子设备。
61、第六方面,本技术实施例提供了一种计算机程序产品,所述计算机程序产品中包含有指令,当指令在计算机或处理器上运行时,使得计算机或处理器执行第一方面任一可能的实现方式所述的方法。
- 还没有人留言评论。精彩留言会获得点赞!