基于感知的铁路桥梁实时监测系统及方法与流程
1.本公开涉及监控技术领域,尤其涉及一种基于感知的铁路桥梁实时监测系统及方法。
背景技术:
2.铁路桥梁是铁路跨越河流、湖泊、海峡、山谷或其他障碍物,以及为实现铁路线路与铁路线路或道路的立体交叉而修建的构筑物。从列车运行的安全性、荷载冲击、材料的疲劳、列车运行时的噪音、结构的耐久性等等问题的要求都高于普通桥梁,传统桥梁结构安全健康数据监测分为:结构监测、环境监测、荷载监测及视频监测等功能独立单一,智能化程度低,无法实现运动物体监测等特点。然而,上述监测均仅能够完成特定功能的监测,如温度、桥面视频、积水状况等,无法完成全面的监测,更无法实现动态监测。
技术实现要素:
3.本公开提供了一种基于感知的铁路桥梁实时监测系统及方法。
4.根据本公开的第一方面,提供了一种基于感知的铁路桥梁实时监测系统,包括:
5.多组传感器,各组传感器均包括主备环视激光雷达、环视相机和北斗定位装置,其中,
6.主备环视激光雷达,用于扫描铁路桥梁感知区域以生成点云数据;
7.环视相机,用于采集铁路桥梁图像;
8.北斗定位装置,用于采集铁路桥梁位置信息;
9.各组传感器均对应至少一个处理器,以便各处理器接收对应组传感器的数据并进行处理;
10.中心服务器,用于接收各处理器处理后的数据并建立铁路桥梁三维健康模型。
11.在第一方面的一些实现方式中,铁路桥梁感知区域分为多段,每段至少配置一组传感器。
12.在第一方面的一些实现方式中,处理器为主备设置,包括一个主处理器,其余为备处理器。
13.根据本公开的第二方面,提供了一种基于本公开第一方面的基于感知的铁路桥梁实时监测系统的铁路桥梁实时监测方法,包括:
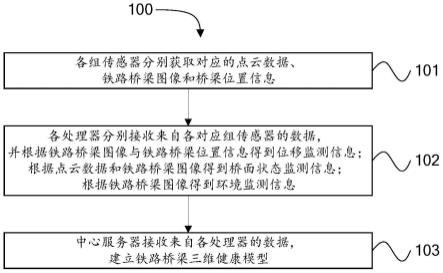
14.各组传感器分别获取对应的点云数据、铁路桥梁图像和铁路桥梁位置信息;
15.各处理器分别接收来自各对应组传感器的数据,并根据铁路桥梁图像与铁路桥梁位置信息得到位移监测信息;根据点云数据和铁路桥梁图像得到桥面状态监测信息;根据铁路桥梁图像得到环境监测信息;
16.中心服务器接收来自各处理器处理后的数据,建立铁路桥梁三维健康模型;
17.根据所述铁路桥梁三维健康模型对铁路桥梁内的运动物体进行动态监测。
18.在第二方面的一些实现方式中,根据铁路桥梁图像与铁路桥梁位置信息得到位移
监测信息包括:
19.根据铁路桥梁位置信息得到水平位置累计变化量,并结合铁路桥梁图像得到位移曲线监测信息。
20.在第二方面的一些实现方式中,桥面状态监测信息包括静态监测信息,包括:
21.通过图像识别技术识别铁路桥梁图像;
22.结合点云数据对铁路桥梁对应感知区域得到静态监测信息。
23.在第二方面的一些实现方式中,桥面状态监测信息包括运动物体监测信息,包括:
24.获取多帧运动物体的点云数据,
25.基于障碍物外接框的轮廓特征,对连续两帧的障碍物信息进行数据关联,估计运动物体的运动状态。
26.在第二方面的一些实现方式中,铁路桥梁图像包括红外图像及可见光图像,根据铁路桥梁图像得到环境监测信息包括:
27.根据红外图像及可见光图像对设定目标进行温度监测,实现高温故障监测、生物识别监测及恶劣天气状态监测。
28.在第二方面的一些实现方式中,中心服务器接收来自各处理器处理后的数据,建立铁路桥梁三维健康模型包括:
29.中心服务器将来自各处理器的位移监测信息、桥面状态监测信息、环境监测信息进行拼接,根据拼接后的数据建立铁路桥梁三维健康模型。
30.在第二方面的一些实现方式中,方法还包括主备环视激光雷达互相校核,包括:
31.主备环视激光雷达分别采集同一个铁路桥梁感知区域的点云数据,对铁路桥梁感知区域内物体进行算法处理后互检,判断是否主备环视激光雷达均能捕捉固定位置的物体;若是,则校核合格;若不是,则校核不合格。
32.本公开中,系统冗余的设计架构保证高可靠运行,充分利用环视激光雷达和环视相机的三维视觉感知以实现桥面空间物体的高精度感知,克服传统传感器功能单一、测量精度低智能化性能低的问题,通过北斗定位装置准确采集桥梁位置信息,可以观察铁路桥梁随时间的变化情况,达到及时发现问题及时消除安全隐患的目的,并根据采集到的信息建立铁路桥梁三维健康模型,通过铁路桥梁三维健康模型实现对运动物体的实时动态监测,保证铁路桥梁轨行区内人员、车辆等运动物体的安全。
33.应当理解,发明内容部分中所描述的内容并非旨在限定本公开的实施例的关键或重要特征,亦非用于限制本公开的范围。本公开的其它特征将通过以下的描述变得容易理解。
附图说明
34.结合附图并参考以下详细说明,本公开各实施例的上述和其他特征、优点及方面将变得更加明显。附图用于更好地理解本方案,不构成对本公开的限定。在附图中,相同或相似的附图标记表示相同或相似的元素,其中:
35.图1是本公开实施例提供的一种基于感知的铁路桥梁实时监测系统的示意图;
36.图2是本公开实施例提供的一种传感器布置方式的示意图;
37.图3是本公开实施例提供的一种感知监测覆盖场景的示意图;
38.图4是本公开实施例提供的一种主备处理器通信的示意图;
39.图5是本公开实施例提供的一种基于感知的铁路桥梁实时监测方法的流程图。
具体实施方式
40.为使本公开实施例的目的、技术方案和优点更加清楚,下面将结合本公开实施例中的附图,对本公开实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本公开一部分实施例,而不是全部的实施例。基于本公开中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的全部其他实施例,都属于本公开保护的范围。
41.另外,本文中术语“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。另外,本文中字符“/”,一般表示前后关联对象是一种“或”的关系。
42.本公开中,采用冗余的系统架构,确保监测系统高可靠运行。基于环视激光雷达、环视相机和高精度北斗定位装置,采用三维图像融合技术建立桥梁三维视觉感知模型,实现桥梁运行区域车辆、设备、轨道线路的实时监测,且通过铁路桥梁三维健康模型可以实现对运动物体进行动态实时监测,从而保证铁路桥梁轨行区内人员及车辆的安全。
43.图1是本公开实施例提供的一种基于感知的铁路桥梁实时监测系统的示意图。
44.如图1所示,基于感知的铁路桥梁实时监测系统包括:
45.多组传感器,各组传感器均包括主备环视激光雷达、环视相机和北斗定位装置,其中,
46.主备环视激光雷达,用于扫描铁路桥梁感知区域以生成点云数据;
47.环视相机,用于采集铁路桥梁图像;
48.北斗定位装置,用于采集铁路桥梁位置信息;
49.各组传感器均对应至少一个处理器,以便各处理器接收对应组传感器的数据并进行处理;
50.中心服务器,用于接收各处理器处理后的数据并建立铁路桥梁三维健康模型。
51.其中,感知区域即可以被各组传感器感应的区域。
52.图2是本公开实施例提供的一种传感器布置方式的示意图。
53.如图2所示,主备环视激光雷达发射激光束,环视相机可以发射红外可见光束以采集铁路桥梁图像,北斗定位装置可以安装北斗卫星导航系统(bds),以实现铁路桥梁的精准定位,各组传感器之间的主备环视激光雷达、环视相机以及北斗定位装置相互配合,实现原始数据的采集。
54.可以理解的是,各组传感器对应的处理器接收数据后,针对对应传感器组的数据进行处理,然后由中心服务器将来自各处理器的数据整合处理并建立铁路桥梁三维监控模型。因此,一个基于感知的铁路桥梁实时监测系统对应多组传感器,与多组传感器一一对应的多个处理器,以及可以接收各处理器数据的一个中心服务器。
55.在一些实施例中,各组传感器距离轨面的高度一致。
56.在一些实施例中,各处理器与中心服务器采用无线网络通信的方式进行数据交换,具体的,采用5g无线网络进行数据交换。
57.在一些实施例中,铁路桥梁感知区域分为多段,每段至少配置一组传感器。
58.前述提到中心服务器基于各组传感器处理后的数据建立铁路桥梁三维健康模型,因此,各组传感器采集同一段铁路桥梁感知区域的数据,可以方便中心服务器后续对数据的拼接处理。
59.图3是本公开实施例提供的一种感知监测覆盖场景的示意图。
60.如图3所示,在一些实施方式中,根据环视激光雷达探测覆盖范围对桥梁感知区域进行分段,即各段感知区域的长度小于等于环视激光雷达最大探测覆盖范围,从而确保通过各组环视激光雷达和环视相机的组合,能够拍摄并扫描整个桥体。在一些实施例中,各段之间可以有交叉部分,如图3所示,铁路桥梁感知区域分为4段,且各段之间有交叉部分,可以理解的是,交叉部分范围越大,处理器获取的数据越全面,使中心服务器处理更方便,在一些实施方式中,交叉部分的长度占各段感知区域长度的一半。
61.如图3所示,底部高度为各传感器组与桥面的垂直距离,中心距离为各传感器组与最近轨道的水平距离,在一些实施例中,底部高度为1.8-2.3米,中心距离为7.5-8.5米,经过反复实验,采用该范围的底部高度与中心距离参数采集得到的监控数据清晰度最高,有利于分析运动物体的运动状态,其原因在于,传感器组有部分盲区,采用该参数范围进行安装,使传感器的安装位置避让盲区位置,优化监测效果。
62.根据本公开的实施例,当中心服务器接收到各处理器的数据时,将数据进行拼接即可得到整个桥体的数据,便于建立完整的铁路桥梁三维健康模型。
63.在一些实施例中,各组传感器均设置有对应的处理器,
64.所述处理器为主备设置,包括一个主处理器,其余为备处理器。
65.图4是本公开实施例提供的一种主备处理器通信的示意图。
66.如图4所示,默认主处理器实现主控功能,具体的,可以为仅主处理器接收对应传感器的信号;也可以为各组传感器对应的处理器均接收对应传感器的信号,但仅由主处理器处理来自传感器的数据,还可以为各组传感器对应的处理器均接收对应传感器的信号,但仅由主处理器向中心服务器发送处理后的数据。主备处理器之间可以直接通过同步脉冲通信,当备用处理器在规定时间内未收到同步信号,备用处理器将接管主控功能。
67.在一些实施例中,各组传感器可以通过硬件切换、无线通信等方式连接主备处理器。
68.根据本公开的实施例,处理器采用冗余的设计,可以进一步保证基于感知的铁路桥梁实时监测系统顺利运行,以便当发现数据故障时,可以及时找到故障数据对应的处理器,进而找到对应的传感器组,并根据对应传感器组的感知区域得知故障位置,及时进行处理。
69.图5是本公开实施例提供的一种基于感知的铁路桥梁实时监测方法的流程图。
70.如图5所示,基于感知的铁路桥梁实时监测方法包括:
71.s101:各组传感器分别获取对应的点云数据、铁路桥梁图像和铁路桥梁位置信息。
72.其中,环视激光雷达获取点云数据,点云数据通常为三维点云图像,可以理解的是,各组环视激光雷达的点云数据拼接可以得到整体铁路桥梁的三维点云图像。环视相机获取铁路桥梁图像,通常为热成像图片。北斗定位装置获取桥梁位置信息,包括北斗定位位置和时间信息。
73.s102:各处理器分别接收来自各对应组传感器的数据,并根据铁路桥梁图像与铁
路桥梁位置信息得到位移监测信息;根据点云数据和铁路桥梁图像得到桥面状态监测信息;根据铁路桥梁图像得到环境监测信息。
74.在s102中,各处理器将各段的监测信息进行整合,完成各感知区域中实现运动物体动态监测数据的采集工作,为后续建立铁路桥梁三维健康模型并对运动物体进行动态监测提供数据基础。
75.其中,位移监测、桥面状态监测、环境监测的监测对象包括:轨道线路、障碍物、列车、交通状态等。根据位移监测、桥面状态监测、环境监测可以实时监测桥状态,在桥面有落石、人员侵线等障碍物进入轨行区、桥面下沉、积水、火灾等异常情况时,以便及时报告故障情况。
76.可以理解的是,各处理器仅能够获取对应感知区域的数据,且仅对来自各对应组传感器的数据进行初步处理,初步处理后的数据能够进行位移、桥面状态、环境实时监测即可,无需对感知区域内的数据进一步整合处理。
77.在s102中,根据铁路桥梁图像与铁路桥梁位置信息得到位移监测信息包括:
78.根据铁路桥梁位置信息得到水平位置累计变化量,并结合铁路桥梁图像得到位移曲线监测信息。
79.在一些实施例中,各处理器根据持续获取的铁路桥梁位置信息对位移曲线进行更新,以实现位移实时监测。
80.根据本公开的实施例,对铁路桥梁位移累计变化量,可以分析铁路桥梁的变化情况,并根据变化情况判断是否应该进行维修等,达到及时发现问题并及时消除安全隐患的目的。
81.在s102中,桥面状态监测信息包括静态监测信息,包括:
82.通过图像识别技术识别铁路桥梁图像;
83.结合点云数据对铁路桥梁对应感知区域得到静态监测信息。
84.前述已经提到,铁路桥梁图像由环视相机获取,点云数据由环视激光雷达获取,因此,桥梁的轨道线路、轨旁设备、桥面主体结构等由环视激光雷达探测扫描和环视相机融合图像完成静态监测。
85.根据本公开的实施例,对铁路桥梁图像进行识别,结合点云数据生成三维静态模型,根据三维静态模型可以获知静态下铁路桥梁各感知区域的实时数据,并为运动物体实时监测提供静止参照物,且为后续中心服务器建立铁路桥梁三维健康模型提供数据支持。
86.在s102中,桥面状态监测信息包括运动物体监测信息,包括:
87.获取多帧运动物体的点云数据,
88.基于障碍物外接框的轮廓特征,对连续两帧的障碍物信息进行数据关联,估计运动物体的运动状态。
89.在一些实施例中,各处理器接收多帧环视激光雷达数据提供的点云数据,然后分析得到目标的运动信息,从运动信息得到障碍物外接框的轮廓特征。其中,通常的环视激光雷达均可实现基于障碍物外接框的轮廓特征进行运动物体跟踪。
90.可以理解的是,通常情况下,只需监测铁路桥梁轨行区内的运动物体即可。运动物体包括:铁路桥梁轨行区车辆、人员、牲畜等。运动状态包括:运动方向、速度大小、加速度、角速度、运动轨迹等信息。
91.根据本公开的实施例,处理器根据环视激光雷达的运动物体跟踪功能,实现对铁路桥面的运动物体的实时监控,保证桥面安全通行。
92.在s102中,铁路桥梁图像包括红外图像及可见光图像,根据铁路桥梁图像得到环境监测信息包括:
93.根据红外图像及可见光图像对设定目标进行温度监测,实现高温故障监测、生物识别监测及恶劣天气状态监测。
94.可以理解的是,红外图像监测桥面温度信息,通过与可见光图像融合实现对设定目标的温度监测。设定目标包括:轨道线、梁体、设备、电力线、轨行区等;生物识别包括:人、动物的准确识别;恶劣天气包括:高温故障,雨雪雾沙尘天气等。
95.根据本公开的实施例,由于不同的目标有不同的温度,对红外图像及可见光图像分析,可以对环境情况进行识别。根据各物体温度不同实现对铁路桥梁不同位置及物体的监测,以实现轨行区状态监测,保障行车安全。
96.s103:中心服务器接收来自各处理器处理后的数据,建立铁路桥梁三维健康模型。
97.在s103中,将各感知区域的数据进行整合,建立铁路桥梁三维健康模型,以实现对整个铁路桥梁的监测,为后续对运动物体进行动态实时监测提供分析依据。
98.在一些实施例中,中心服务器将来自各处理器的位移监测信息、桥面状态监测信息、环境监测信息进行拼接,根据拼接后的数据建立铁路桥梁三维健康模型。
99.由于中心服务器可以接收来自各处理器的位移监测信息、桥面状态监测信息、环境监测信息,且各处理器均只能获取对应感知区域内的信息,因此,中心服务器将所有信息拼接整合,即得到各感知区域的感知信息,可以得到覆盖整个铁路桥面体的数据。
100.中心服务器进一步对覆盖整个铁路桥面体的数据进行拼接,建立铁路桥梁三维健康模型。在一些实施例中,中心服务器先根据静态监测信息建立静态三维模型,并在静态三维模型的基础上,通过多帧激光雷达数据,分析得到目标的运动信息,运动物体跟踪基于障碍物外接框的轮廓特征,对连续两帧的障碍物信息进行数据,关联,估计运动物体的运动状态。并根据位移监测信息完成对整体桥梁的位移监测。
101.根据本公开的实施例,结合环视激光雷达、环视相机以及北斗定位装置的数据建立桥梁三维健康模型,实现桥面空间物体的高精度感知,克服传统传感器功能单一、测量精度低智能化性能低的问题,达到及时发现问题及时消除安全隐患的目的。
102.s104:根据所述铁路桥梁三维健康模型对铁路桥梁内的运动物体进行动态监测。
103.如图3所示,铁路桥梁感知区域被分为4段,将4段感知区域对应处理器采集到的位移监测信息、桥面状态监测信息以及环境监测信息进行拼接,可以得到完整的铁路桥梁信息。进一步结合运动物体监测信息,运动物体跟踪基于障碍物外接框的轮廓特征,对连续两帧的障碍物信息进行数据关联,估计运动物体的运动状态,实现桥梁轨行区车辆、人员、等运动物体的动态测量。
104.本公开通过s101-s102分段采集对运动物体进行动态监测所需的所有数据,并在s103中建立铁路桥梁三维健康模型将数据进行整合,以实现对整个铁路桥梁的监测,然后在s104中根据对整个铁路桥梁的监测信息进一步分析,判断分析运动物体在铁路桥梁上的运动行为,进而根据运动物体的运动轨迹预测危险,从而保证人员及车辆的安全性。
105.在一些实施例中,还包括主备环视激光雷达互相校核,包括:
106.主备环视激光雷达分别采集同一个铁路桥梁感知区域的点云数据,对铁路桥梁感知区域内物体进行算法处理后互检,判断是否主备环视激光雷达均能捕捉固定位置的物体;若是,则校核合格;若不是,则校核不合格。
107.环视激光雷达包括主环视激光雷达和备环视激光雷达,采用冗余的设计,保证基于感知的铁路桥梁实时监测系统顺利运行。
108.可以理解的是,只要能反映环视激光雷达捕捉固定位置的物体的算法,均为本公开可以接受的算法,具体包括对限界区域内物体点云数据切割、相互对比等算法。
109.在一些实施方式中,当校核不合格时,重新进行校核,达到阈值次数仍不合格时,则检查对应的主备环视激光雷达设备,并对损坏的激光雷达设备进行维修或更换。
110.根据本公开的实施例,主备环视激光雷达互相校核以保证环视激光雷达设备正常运行,避免环视激光雷达故障导致位移监测、桥面状态监测、环境监测数据不准确,进而导致铁路桥梁三维健康模型无法反映铁路桥梁实时情况。
111.本公开提供一种铁路桥梁的实时监测方法,包括如下步骤:
112.根铁路桥梁三维健康模型观测铁路桥梁;
113.当发现疑似异常时,判断是否可以根据铁路桥梁三维健康模型提供的数据直接判断为正常或异常;
114.若是,则直接针对铁路桥梁进行相应的处理;
115.若否,则调取疑似异常部分对应的处理器数据,根据处理器提供的数据判断是否为异常。
116.异常包括:桥面有落石、人员侵线等障碍物进入轨行区、桥面下沉、积水、火灾、高温故障、雨雪雾沙尘天气等。
117.可以理解的是,由于铁路桥梁三维健康模型的数据来自各处理器数据的整合,因此,各处理器的数据较模型整体数据更加全面,因此,当仅根据铁路桥梁三维健康模型的数据无法判断时,可以调取对应处理器的数据辅助判断。
118.需要说明的是,对于前述的各方法实施例,为了简单描述,故将其都表述为一系列的动作组合,但是本领域技术人员应该知悉,本公开并不受所描述的动作顺序的限制,因为依据本公开,某些步骤可以采用其他顺序或者同时进行。其次,本领域技术人员也应该知悉,说明书中所描述的实施例均属于可选实施例,所涉及的动作和模块并不一定是本公开所必须的。
119.上述具体实施方式,并不构成对本公开保护范围的限制。本领域技术人员应该明白的是,根据设计要求和其他因素,可以进行各种修改、组合、子组合和替代。任何在本公开的精神和原则之内所作的修改、等同替换和改进等,均应包含在本公开保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1