基于摆臂双角镜自补偿分束器的迈克尔逊干涉仪及其应用的制作方法
1.本发明涉及用于傅里叶变换光谱仪中的迈克尔逊干涉仪,属于光学遥感技术领域。
背景技术:
2.傅里叶变换光谱仪是科学分析、航空航天、资源勘探、环境监测等领域不可或缺的遥感设备,而迈克尔逊干涉仪是其核心子系统。传统的一个平面镜平动的迈克尔逊干涉仪光程差是机械程差的2倍,并且其采用的由分束器/补偿器组成的传统分束器需要镀制分束膜和增透膜,对宽谱段的光谱探测而言,镀膜难度极大。
技术实现要素:
3.本发明要解决的技术问题是:克服现有技术的不足,本发明提供了一种基于摆臂双角镜自补偿分束器的迈克尔逊干涉仪及其应用,解决了传统迈克尔逊干涉仪分束器/补偿器镀膜的难题。
4.本发明所采用的技术方案是:
5.一种基于摆臂双角镜自补偿分束器的迈克尔逊干涉仪,包括,摆臂、角镜和光学平行平板;
6.摆臂的两端分别固定安装有一个角镜;
7.摆臂能够相对光学平行平板绕轴转动;
8.两个角镜的光轴正交且交点与光学平行平板的中心点重合,两角镜关于光学平行平板对称;
9.光学平行平板设置在傅里叶变换光谱仪的输入光路和输出光路之间。
10.优选地,还包括:主承力板和挠性枢轴;
11.光学平行平板固定安装在主承力板上,
12.主承力板通过挠性枢轴连接摆臂。
13.优选地,两个角镜的顶点到挠性枢轴的中心轴线距离相等。
14.优选地,光学平行平板的中心面与主承力板的中心面重合。
15.优选地,还包括:音圈电机线圈和音圈电机磁钢;
16.音圈电机磁钢固定连接摆臂,音圈电机线圈固定在主承力板上;
17.音圈电机磁钢在音圈电机线圈通电产生的磁场作用下,驱动摆臂绕挠性枢轴转动,摆臂在音圈电机磁钢的带动下以挠性枢轴为转轴往复摆动。
18.优选地,摆臂的质心过挠性枢轴的轴线。
19.优选地,摆臂绕轴转动角度θ的确定方法,具体为:
[0020][0021]
其中,opd为两个角镜的最大光程差,l为角镜顶点到挠性枢轴轴线的距离。
[0022]
优选地,光学平行平板的光强透过率τ的确定方法,具体为:
[0023][0024][0025]
其中,r是光学平行平板的光强反射率;δ是光线在光学平行平板中每多往返一次自补偿分束器产生的相位差;λ是波长;n是光学平行平板折射率;h是光学平行平板厚度;i是光线在光学平行平板内的折射角。
[0026]
优选地,光学平行平板厚度h的确定方法,具体为:
[0027][0028]
其中,δν为光谱分辨率,n是光学平行平板折射率,i是光线在光学平行平板内的折射角。
[0029]
上述一种基于摆臂双角镜自补偿分束器的迈克尔逊干涉仪在傅里叶变换光谱仪中的应用。
[0030]
本发明与现有技术相比的优点在于:
[0031]
(1)本发明基于摆臂双角镜自补偿分束器的迈克尔逊干涉仪,摒弃传统的平面镜平动结构,采用摆臂双角镜摆动结构。由于两个角镜差动运动,因此光程差是机械程差的4倍;角镜对入射光束回复反射的特性,使干涉光路具有自动准直的特点,提高了抗振能力。
[0032]
(2)本发明采用自补偿分束器,解决了宽谱段应用中传统分束器/补偿器镀分束膜和增透膜难度大的问题。自补偿分束器是一块光学平行平板,无需补偿器,无需镀膜。这也使得干涉仪设计和装调过程得到极大的改进,减少了补偿器和装调环节,减少了装调误差,提升了干涉仪的调制度。
附图说明
[0033]
图1为本发明的基于摆臂双角镜自补偿分束器的迈克尔逊干涉仪光路示意图;
[0034]
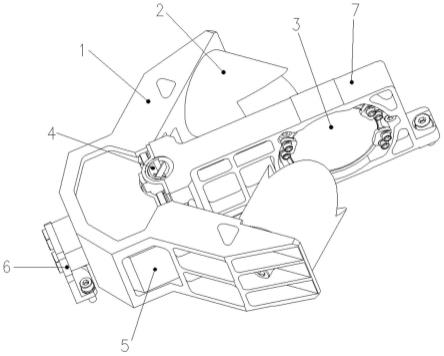
图2为本发明的基于摆臂双角镜自补偿分束器的迈克尔逊干涉仪结构示意图;
[0035]
图3为本发明的自补偿分束器结构示意图。
具体实施方式
[0036]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0037]
本发明的摆臂双角镜自补偿分束器迈克尔逊干涉仪,通过摆臂往复摆动提供双角镜差动光程扫描,可实现4倍机械程差放大,采用不需要镀膜的自补偿分束器,解决了传统分束器/补偿器镀膜难度大的难题。
[0038]
本发明一种基于摆臂双角镜自补偿分束器的迈克尔逊干涉仪如图2所示,本发明包括:摆臂1、角镜2、自补偿分束器3、挠性枢轴4、音圈电机磁钢5、音圈电机线圈6和主承力板7。
[0039]
傅里叶变换光谱仪包括:输入光路、迈克尔逊干涉仪、输出光路和探测器;输入光路、迈克尔逊干涉仪、输出光路和探测器分别固定安装在仪器安装底板上。
[0040]
摆臂1的作用是为角镜2提供稳定刚性安装,带动角镜2绕挠性枢轴4左右摆动,形成光程差扫描以实现对输入光束的干涉调制。为保证摆臂1在工作过程中运行平稳,需对摆臂1进行动平衡调整,使整个摆臂1的质心位于其回转中心(挠性枢轴4)上,即摆臂1的质心过挠性枢轴4的轴线。
[0041]
如图1所示,所述的两个角镜2分别固定在摆臂的两端,角镜2为光路提供回复反射,使入射光束按入射方向返回。
[0042]
主承力板7固定于仪器安装底板上,摆臂1通过挠性枢轴4连接主承力板7;挠性枢轴4上套装有挠性弹簧。所述的挠性枢轴4作为摆臂1的支承元件,将机构运动部分(摆臂1和音圈电机磁钢5)与主承力结构(主承力板7)相连。挠性枢轴4无接触摩擦、无启动摩擦,无需润滑,扭转阻力矩与枢轴扭转刚度、转动角度正相关,不受温度等环境因素影响,特别适用于空间高精度小摆角机构的轴系支撑。
[0043]
音圈电机(包括:音圈电机磁钢5和音圈电机线圈6)作为驱动元件,音圈电机结构简单、可靠性高、响应快,易于实现短行程快响应的高精度闭环伺服控制。
[0044]
所述的主承力板7的主要作用是为摆臂1、自补偿分束器3、音圈电机等提供稳定、可靠的安装支撑,并将整个干涉仪固定到仪器底板上。
[0045]
自补偿分束器3安装在主承力板7上,自补偿分束器3的中心面与主承力板7的中心面重合。两个角镜2分别安装在摆臂1的两端,两个角镜2的顶点到挠性枢轴4的中心轴线距离相等,挠性枢轴4作为干涉仪摆臂1的支承元件,将摆臂1与主承力板7相连,摆臂1能够相对主承力板7绕挠性枢轴4转动。两个角镜2的光轴正交且交点与自补偿分束器3的中心点重合,即两角镜2关于光学平行平板31对称。
[0046]
音圈电机磁钢5固定连接摆臂1,音圈电机线圈5固定在主承力板7上。音圈电机线圈6固定连接主承力板7。音圈电机磁钢5在音圈电机线圈5通电产生的磁场作用下,驱动摆臂1绕轴转动,摆臂1在音圈电机磁钢6的带动下以挠性枢轴4为转轴往复摆动。
[0047]
光学平行平板31设置在傅里叶变换光谱仪的输入光路和输出光路之间。光学平行平板31前后表面经过光学抛光的平行平板,其前后2个平面的夹角不应大于角秒级别。
[0048]
根据傅里叶变换光谱仪原理,无切趾光谱分辨率由系统最大光程差决定,两者关系为:
[0049][0050]
其中,δν为光谱分辨率,opd为两个角镜2的最大光程差。根据傅里叶变换光谱仪确定的光谱分辨率δν,可以计算出迈克尔逊干涉仪的最大光程差opd,再根据最大光程差,以及摆臂长度可以计算出摆臂的摆动角度θ为:
[0051]
[0052]
式中l为干涉仪摆臂长度,即角镜顶点到挠性枢轴轴线的距离。
[0053]
自补偿分束器3采用成熟的光学件装框形式:周边径向多点注胶、轴向压板限位。分束器框材质选用铝合金。自补偿分束器3整体安装在主承力板7上。自补偿分束器3结构示意图如图3所示,包括:光学平行平板31、分束器框32和分束器压块33。自补偿分束器采用成熟的光学件装框形式,周边径向多点注胶、轴向采用靠面和压板限位。
[0054]
所述的自补偿分束器透过率τ计算公式为:
[0055][0056][0057]
其中,r是光学平行平板31的光强反射率;δ是光线在光学平行平板31中每多往返一次自补偿分束器产生的相位差;λ是波长;n是光学平行平板31折射率;h是光学平行平板31厚度;i是光束在光学平行平板31内的折射角。
[0058]
所述的自补偿分束器3其通道效应周期为:
[0059][0060]
为减小通道效应对傅里叶变换光谱仪光谱分辨率的影响,傅里叶变换光谱仪的光谱分辨率δν建议大于等于3δσ,即:
[0061]
δν≥3δσ
[0062]
即光学平行平板31的厚度h的建议值为:
[0063][0064]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
[0065]
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1