基于极化特性自适应阵元选择的同时多波束雷达的波束驻留调度方法
本发明属于雷达系统资源管理领域,特别涉及相控阵雷达的自适应驻留调度的方法。
背景技术:
1、在越来越复杂的战争环境中,相控阵雷达(phased array radar,par)由于具有多功能及多种工作方式等优点而被广泛应用,这很大程度上依赖于相控阵雷达的同时多波束能力。相控阵雷达可以同时发射独立的多个波束,因此可以执行同时多目标监测、跟踪、定位、成像等任务。目前的多波束实现方法有三类,一是利用相控阵雷达波束捷变特性,在脉冲重复周期内发送不同指向的波束,近似实现同时多波束(chen j,tian z,wang l,etal.adaptive simultaneous multi-beam dwell scheduling algorithm formultifunction phased array radars[j].journal of information&computationalscience,2011,8(14):3051-3061.)。二是通过设计各阵元辐射信号的加权系数,实现多波束赋形,文献(魏法,杨明磊,何小静,周鼎森,陈伯孝.基于改进粒子群算法的平面阵同时多波束赋形方法[j].系统工程与电子技术,2022,44(06):1789-1797.)提出基于改进粒子群算法的平面阵同时多波束赋形方法,研究了阵元数较多的大型相控阵平面阵同时多波束赋形可行方法。三是利用相控阵孔径划分成若干个子阵列,每个子阵都可以单独发射波束,从而实现同时多波束(xue g,du z,wei w,et al.multi-beam dwell adaptive schedulingalgorithm for helicopter-borne radar[c]information technology&artificialintelligence conference.2014:401-404.)。为了充分发挥同时多波束雷达系统效能,需设计有效的波束驻留调度方法。
2、对于雷达系统波束驻留调度策略的设计,早期通常采用固定模板、多模板、部分模板调度策略。然而,模板法缺乏与实际任务负载自适应匹配的能力,因此,自适应波束驻留调度算法得到广泛的研究。文献(卢建斌,胡卫东,郁文贤.多功能相控阵雷达实时任务调度研究[j].电子学报,2006,34(4):732-736.)中提出了一种自适应波束驻留调度算法,其中引入了时间指针的概念以使任务优先级在调度过程中动态变化,该优先级综合考虑了任务的工作方式优先级和截止期两个参数。文献(zhang h,xie j,zong b,et al.dynamicpriority scheduling method for the air-defence phased array radar[j].ietradar sonar&navigation,2017,11(7):1140-1146.)综合考虑了将目标的威胁度和截止期,基于此设计了动态优先级。文献(mir h s,guitouni a.variable dwell time taskscheduling for multifunction radar[j].ieee transactions on automation scienceand engineering,2014,11(2):463-472.)将任务驻留时间建模为变量,这允许任务驻留时间具有一定的灵活性,从而能够增强雷达时间轴的利用率。文献(qu z,ding z,moop.dual-side scheduling for radar resource management[c]21st internationalradar symposium(irs),2020:260-263)考虑了期望执行时间准则,提出了一种双侧调度方法,在一个调度间隔内设置一个分离点,将一个调度间隔分成了两侧,任务从分离点开始分别向调度间隔两边进行调度。但上述文献都仅考虑单波束驻留调度问题,阵元利用不灵活,从而任务丢失率在总任务数增加时明显增大。
3、针对上述问题,文献(chen j,tian z,wang l,et al.adaptive simultaneousmulti-beam dwell scheduling algorithm for multifunction phased array radars[j].journal of information&computational science,2011,8(14):3051-3061.)通过计算相控阵雷达系统的最大波束重叠数,引入虚拟驻留时间线的方法来实现多波束驻留调度。但这种方法本质上并没有实现同时发射多波束,只是利用了脉冲重叠技术,在一个脉冲重复周期内发射不同方向的波束,从而提高系统的时间利用率。文献(xue g,du z,wei w,et al.multi-beam dwell adaptive scheduling algorithm for helicopter-borneradar[c]information technology&artificial intelligence conference.2014:401-404.)利用相控阵孔径划分成若干个子阵列,根据不同的目标距离选择不同的雷达工作模式,不同工作模式下占用的子阵资源不同,剩余的资源就可以用于执行其他任务,从而实现同时多波束驻留调度。
4、在上述同时多波束驻留调度算法中,没有考虑阵元的极化特性。然而,随着机载探测平台的发展需要,共形阵列应运而生,贴合载体表面的阵元受布阵位置的影响,导致不同阵元在统一坐标系中具有不同的极化特性。
5、针对以上问题,本发明提出了基于极化特性自适应阵元选择的同时多波束雷达的波束驻留调度方法。该方法利用文献(孙仕礼,刘帅,金铭.基于欧拉旋转和极化投影的共形阵列建模方法[j].信号处理,2021,37(08):1430-1440.)所提出的利用欧拉旋转得到阵元局部方向图表示后,在全局直角坐标系进行极化投影过程得到极化矢量的方法,获得各阵元在全局直角坐标系下的极化矢量,并根据任务作战性能需求,为不同类型的任务分配不同的若干个阵元来发射波束,从而实现了同时多波束。随后,在同时多波束驻留调度过程中,采用基于时间指针的波束驻留调度方法思想,在滑动时间指针时,将当前时刻调度的任务中驻留时间最大者作为更新时间指针的滑动步长。仿真结果表明,与现有方法相比,此方法有效提升了同时多波束雷达系统的调度性能。
技术实现思路
1、本发明提出了一种基于极化特性自适应阵元选择的同时多波束雷达的波束驻留调度方法。下面对阵元的极化特性进行简要说明:
2、在考虑极化后,第i个阵元的发射特性可以用向量进行描述(1≤i≤ntotal),其中,θ为俯仰角,为方位角,ntotal为阵元总个数,是阵元i在方向上辐射特性在x方向上的投影,是阵元i在方向上辐射特性在y方向上的投影,是阵元i在方向上辐射特性在z方向上的投影。
3、假设在当前调度间隔t0,tend内有n个驻留任务t=t1,t2,…,tn申请调度,其中,t0为当前调度间隔的起始时刻,tend为当前调度间隔的结束时刻,tend-t0为本调度间隔的时长。驻留任务模型为其中,rti为期望执行时刻,sti为实际执行时刻,li为时间窗,pi为工作方式优先级,δti为驻留时长,为任务接收的平均功率需求,pti为信号发射功率,表示任务的方位角和俯仰角。基于极化特性自适应阵元选择的同时多波束雷达系统的波束驻留调度方法包括如下步骤:
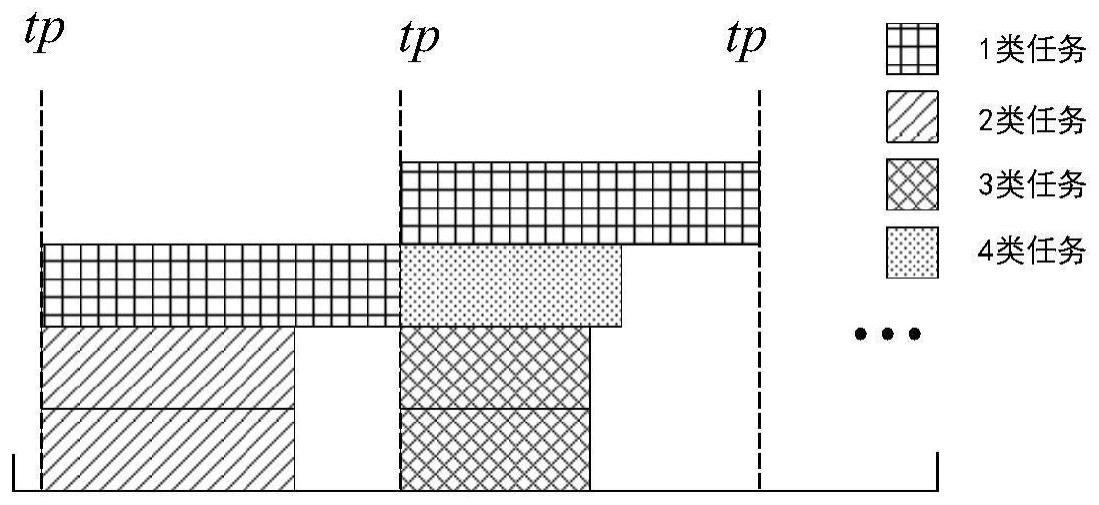
4、步骤1:对时间指针tp进行初始化,令tp=t0,i=0。
5、步骤2:选出任务请求队列t中满足rt+l<tp的任务,记这些任务个数为ni,将它们从任务请求队列中删除,再将其存入任务删除队列,i=i+ni,令m=ntotal,ntotal为阵元总个数。
6、步骤3:在任务请求队列中,假设满足tp≥rt-l的任务有x个。若x>0,按照(1)式计算各任务优先级swi,其中,xdi为任务请求ti(1≤i≤x)在x个任务中按截止期从大到小排列的序号,xpi为在x个任务中按工作方式优先级从小到大排列的序号。
7、
8、将这x个任务按综合优先级从大到小排序,令itp=1。若x=0,则更新时间指针tp=tp+δtpmin,其中,δtpmin为时间指针的最小滑动步长。更新后若tp≥tend,则本次调度间隔分析结束;否则回到步骤2.
9、步骤4:取排序后的任务队列中的第itp个任务titp。
10、步骤5:若tp+δtitp>tend,则本次调度间隔分析结束,δtitp为titp的驻留时间。否则,令zy_usei为空,m=1,并执行下一步骤。
11、步骤6:根据titp的方向参数,由(2)式在阵元各极化方向中可找到与任务titp目标方向最为匹配的方向θmin与θmax为俯仰角的最小值与最大值,与为方位角的最小值与最大值,δθ,为俯仰角与方位角的离散度。
12、
13、从而对于任务titp,m个阵元在方向的极化特性构成了如(3)式所示的矩阵。
14、
15、步骤7:根据(4)式计算这m个阵元在方向的极化特性各分量平方和,并从大到小进行排序,将按此方法排序的阵元序号存入zy_num。
16、
17、步骤8:选择zy_num中前m个阵元共同计算功率值,记为pcal。
18、步骤9:若pcal≥pdes,则m=m-m,并跳至步骤11,否则m=m+1,并进入步骤10。
19、步骤10:若m>m,则跳到步骤13,否则,返回步骤8。
20、步骤11:将titp放入任务执行队列,并把titp从任务请求队列中删除,令i=i+1,将所用的m个阵元序号存入zy_usei,表示任务i所用阵元序号集合。将这些阵元在zy中删除,将titp的驻留时间存入t_store,itp=itp+1。
21、步骤12:若itp≤x且m>0,则返回步骤4,否则进入步骤13。
22、步骤13:tp时刻的调度分析完毕,更新时间指针tp=tp+max(t_store)。
23、步骤14:若i=n,本调度间隔分析结束,否则跳到步骤2。
24、发明原理
25、雷达波束驻留调度过程需要遵循两个准则,包括了重要性准则和紧迫性准则。根据调度的这两项准则,针对每个波束驻留调度任务构建如下调度收益函数:
26、gi(rti,li,pi,t0,tend)=g1(pi)g2(rti,li,t0,tend) (5)
27、其中,
28、
29、因g1(pi)随着任务工作方式优先级的增大而增大,所以这一项体现了调度的重要性准则;g2(rti,li,t0,tend)中c1为一正常数,因其随任务的截止期的减小而增大,所以这一项体现了调度的紧迫性准则。传统基于时间指针分析方法虽然可以有效求解上述问题模型,但由于单波束的工作方式,该算法在每次分析时刻只选择一个任务执行。本发明考虑基于极化特性自适应选择阵元来实现同时多波束,并与基于时间指针的波束驻留调度方法相结合。综合考虑同时多波束驻留调度问题中的目标函数与约束条件,波束驻留调度问题的数学模型建立如下:
30、
31、其中,n1,n2和n3分别为调度任务的数量,延迟任务的数量和删除任务的数量,显然有n=n1+n2+n3。mi为任务所用阵元数量,x为当前时刻可执行任务总数,δi为一布尔变量,若任务i执行则为1,否则为0。在优化模型中,第二和第三个不等式反映了延迟任务和删除任务应满足的条件。第四和第五个不等式表示同一时刻执行的任务所用阵元总数之和不超过系统总阵元数且阵元不能重复使用。
32、将发射信号表示为s(t),若引入各个方向上的单位向量和那么对于处的目标,忽略噪声的影响,利用期望信号阵列导向矢量进行补相后,阵元i发射的信号为:
33、
34、到达处目标的信号为:
35、
36、各个阵元所接收的信号可表示为与各自极化特性向量的内积,因此,补相后阵元j的接收信号可表示为:
37、
38、其中,将(9)代入(10)得:
39、
40、各阵元接收通道在接收目标回波信号时会受到接收噪声的影响,因此,阵元j的实际接收信号可表示为:
41、
42、其中,vj(t)为阵元j的接收噪声,设其为高斯白噪声,功率谱密度为n0,对接收信号进行匹配滤波得到:
43、
44、令
45、
46、
47、其中,es为发射信号s(t)的能量,将式(11)代入(13)得:
48、
49、假设接收阵列和发射阵列一样,则可将yj表示为yi,接收波束形式为:
50、
51、vi的功率为:
52、
53、则的功率为:
54、
55、结合上述过程,发射信号经处目标散射后,接收阵接收到回波,考虑传播过程中的路径衰减等因素,则接收信噪比可表示为:
56、
57、其中,r为目标距离,σ表示目标的rcs,λ表示信号波长,es=ptτ,pt为每个阵元的发射功率,τ为发射信号脉宽,τbn≈1,bn为带宽,n0=kt0fn,k为玻尔兹曼常数,t0为环境温度,fn为接收机噪声系数。(20)式可写为:
58、
59、通过以上推导,我们可以得到考虑了阵元极化特性的信噪比计算公式。根据任务的信噪比需求,进而得到其平均功率需求。将信噪比需求表示为snrdes,通过式(21),可以得到针对距离在r处,rcs为σ的目标,所需的接收平均功率为:
60、
61、步骤1中假设总共有ntotal个阵元,根据它们的极化特性,在当前执行时刻,多个不同的阵元组合可以得到同时多波束。进行调度时,重要性准则与紧迫性准则分别要求工作方式优先级高的任务与截止期早的任务应尽可能被执行。步骤3中,式(1)体现了上述两项准则。步骤6中,首先找出所有可用阵元在任务方向的极化特性向量,构成集合zy。根据(22)式,决定功率值的关键在于一项,为了减少计算复杂度,提高系统的执行效率,采用启发式方法来代替穷举方法,穷举方法即每一次选择都遍历可选的阵元,按(22)式计算,从中选择最优的。步骤7中采用启发式方法选择阵元,计算阵元在方向的极化特性各分量平方和,由大到小排序,并将按此方式进行排序的阵元序号存入zy_num,在zy_num中依次选择阵元,直至满足任务期望功率。步骤11中表明若当前时刻可执行任务未分析完且阵元还有剩余,则接着为下一个任务选取阵元组合。当前tp时刻,放入执行队列的全部任务的驻留时间都存在步骤12中的t_store内,并以其中的最大值作为更新时间指针的滑动步长。最后,得到最终调度序列以及调度任务选取的阵元组合结果。
- 还没有人留言评论。精彩留言会获得点赞!