一种用于自动检测收口筒形件缺陷的方法与流程
1.本发明涉及筒形零件缺陷检测技术领域,尤其涉及一种用于自动检测收口筒形件缺陷的方法。
背景技术:
2.筒形零件在成型过程中易产生拉伸裂纹、划伤及杂质压入表面的压伤等缺陷;在零件内部承受高温高压的工况条件下,上述缺陷极易扩展,从而造成零件破损、甚至失效等问题。因此,现有技术中通常采用渗透探伤的方法对筒形零件进行上述缺陷的检测。
3.渗透性探伤是工业发展过程中所衍生出来的一种应用技术,其是利用毛细现象检查材料表面缺陷的一种无损检验方法。由于渗透探伤自身在实际执行过程中的简单操作性,促使其被广泛的各个领域之中。然而,筒形零件内壁,尤其是小口径收口结构、大长径比的筒形零件内壁,渗透探伤的操作困难、常规的观察与测量仪器难以进行深入探测;并且,收口筒形结构入口处为斜肩部位,其与直筒部位存在一定的斜度,采用常规的喷头进行喷涂(如渗透剂喷涂、显像剂喷涂),极易出现喷涂材料流挂、喷涂厚度不均匀及出现喷涂死角的问题,从而导致检测精度低、无法全面有效的检测收口筒形零件内壁的缺陷。
技术实现要素:
4.针对以上现有技术存在的问题,本发明的目的在于提供一种用于自动检测收口筒形件缺陷的方法,该方法适用于收口筒形零件内壁的渗透探伤,其能够进行自动化检测,从而降低劳动强度、减少劳动生产力;同时采用该方法能够全面、有效检测收口筒形零件内壁的缺陷。
5.本发明的目的通过以下技术方案实现:一种用于自动检测收口筒形件缺陷的方法,其特征在于:采用自动化探伤系统,所述自动化探伤系统包括工作台、滑轨、样件座、渗透组件、清洗组件、烘干组件、显像组件及检测组件;所述滑轨固定设置在所述工作台上端面的两侧,所述样件座设置在所述滑轨上且所述样件座与所述滑轨滑动连接;所述工作台一端上侧固定设置检测组件且所述工作台上侧由靠近到远离所述检测组件依次设置显像组件、烘干组件、清洗组件与渗透组件,所述工作台表面对应所述显像组件、烘干组件、清洗组件与渗透组件分别开设一通孔;所述样件座上设置用于安装收口筒形零件的台阶孔;所述渗透组件包括渗透喷枪、第一运动机构、渗透导轨及第一龙门架,所述第一龙门架与所述工作台两侧及地面固定连接,第一龙门架中部且对应通孔固定设置一渗透导轨,所述第一运动机构与所述渗透导轨滑动连接且所述第一运动机构下端设置若干渗透喷枪;所述清洗组件包括清洗喷枪、第二运动机构、清洗导轨及第二龙门架,所述第二龙门架与所述工作台两侧及地面固定连接,第二龙门架中部且对应通孔固定设置一清洗导轨,所述第二运动机构与所述清洗导轨滑动连接且所述第二运动机构下端设置若干清洗喷枪;所述烘干组件包括烘干风机与第三龙门架,所述第三龙门架与所述工作台两侧及地面固定连接,第三龙门架中部且对应通孔固定设置一烘干风机;所
述显像组件包括显像喷枪、第三运动机构、显像导轨及第四龙门架,所述第四龙门架与所述工作台两侧及地面固定连接,第四龙门架中部且对应通孔固定设置一显像导轨,所述第三运动机构与所述显像导轨滑动连接且所述第三运动机构下端设置若干显像喷枪;所述渗透喷枪、清洗喷枪与显像喷枪均包括喷嘴、定位块、密封块及喷管;所述定位块由下部斜锥段与直线段组成且直线段上端与对应运动机构(即第一运动机构、第二运动机构、第三运动机构)固定连接,所述密封块套接在所述定位块外壁且所述定位块的直线段与所述密封块滑动连接;所述喷嘴设置在所述定位块下端,包括第一斜喷段及第二斜喷段,所述第一斜喷段为圆筒状、其外壁且绕其中轴线均匀分布若干向上倾斜的第一斜喷口,所述第二斜喷段为半球状、其外壁且绕其中轴线均匀分布若干向下倾斜的第二斜喷口,所述第一斜喷段与所述第二斜喷段螺纹连接(第一斜喷段与第二斜喷段之间不连通)且所述第一斜喷口与所述第二斜喷口错位均匀分布(即第二斜喷口位于相邻两个第一斜喷口连线的中线上,第一斜喷口位于相邻两个第二斜喷口连线的中线上);所述喷嘴上端(即第一斜喷段上端)固定连接喷管且所述喷管贯穿所述定位块;所述喷嘴、定位块、密封块与喷管共轴线。
6.所述自动检测收口筒形零件内壁的方法具体为:a、零件放置:初始位置时样件座位于所述渗透组件远离所述清洗组件的一侧;先将待检测的收口筒形零件分别放入所述台阶孔内并固定,再启动样件座在滑轨上滑动;b、渗透剂喷涂过程:当样件座运动到第一龙门架正下方时,停止样件座运动、启动第一运动机构下移,第一运动机构带动渗透喷枪下移,直至渗透喷枪的喷嘴分别伸入对应的收口筒形零件内且渗透喷枪的密封块下端与收口筒形零件口部上端接触;然后启动渗透喷枪,实现第一运功机构边下移边渗透喷涂的过程,直至到达指定位置,关闭渗透喷枪,启动第一运动机构上移回到初始位置;c、清洗剂喷涂过程:完成渗透剂喷涂后、静止不动保持1~2min(使渗透剂能有足够时间渗入缺陷内)、再启动样件座向靠近第二龙门架方向运动,当样件座运动到第二龙门架正下方时,停止样件座运动并启动第二运动机构下移,第二运动机构带动清洗喷枪下移,直至清洗喷枪的喷嘴分别伸入对应的收口筒形零件内且清洗喷枪的密封块下端与收口筒形零件口部上端接触;然后启动清洗喷枪,实现第二运功机构边下移边清洗喷涂的过程,直至到达指定位置,关闭清洗喷枪,启动第二运动机构上移回到初始位置;d、烘干过程:完成清洗剂喷涂后、启动样件座向靠近第三龙门架方向运动,当样件座运动到第三龙门架正下方时,停止样件座运动并启动烘干风机运转,实现对收口筒形零件内壁的烘干;e、显像剂喷涂过程:完成烘干后、启动样件座向靠近第四龙门架方向运动,当样件座运动到第四龙门架正下方时,停止样件座运动并启动第三运动机构下移,第三运动机构带动显像喷枪下移,直至显像喷枪的喷嘴分别伸入对应的收口筒形零件内且显像喷枪的密封块下端与收口筒形零件口部上端接触;然后启动显像喷枪,实现第三运功机构边下移边显像喷涂的过程,直至到达指定位置,关闭显像喷枪,启动第三运动机构上移回到初始位置;f、缺陷检测过程:完成显像剂喷涂后、启动样件座向靠近检测组件的方向运动,当样件座运动到检测组件正下方时,停止样件座的运动,启动检测组件对收口筒形零件内壁
进行检测。
7.作进一步优化,所述步骤d中烘干的温度为50~60℃,烘干时间为1~3min。
8.由于斜肩相比于直筒段具有一定的斜度,若采用现有的单向喷口结构在斜肩段喷涂,难以同时解决涂层厚度不均、涂层材料流挂的问题;如,第一斜喷口因喷口轴线与斜肩接近垂直,喷涂涂层材料挂壁性好,不容易产生流挂,但因第一斜喷口与斜肩距离近,喷涂距离小,只能采用较小的气压,导致喷涂材料集中,实现涂层周向的均匀性控制极为困难;而第二斜喷口喷涂距离大,喷涂材料分散,易于实现涂层周向的均匀性控制,但其与斜肩夹角小,喷涂涂层材料挂壁性差,若采用较大喷涂气压,难以避免流挂等缺陷。本技术采用第一斜喷口与第二斜喷口的组合结构同时喷口周向均匀分布,确保涂层的周向均匀性(单个喷口喷出的涂层材料在筒形件内壁周向上厚度不均匀,即正对喷口的方向涂层厚度大,向两侧厚度逐渐变小):本技术先使相邻两个第二斜喷口所喷涂层边缘搭接适当宽度,而后,位于两个第二斜喷口中间的第一斜喷口所喷涂层在上述边缘搭接处补喷一层,以保证涂层周向的均匀性。
9.作进一步优化,所述检测组件包括内窥摄像头、第四运动机构、内窥导轨及第五龙门架;所述第五龙门架与所述工作台两侧及地面固定连接,第五龙门架中部固定设置一内窥导轨,所述第四运动机构与所述内窥导轨滑动连接且所述第四运动机构下端设置若干内窥摄像头。
10.优选的,所述内窥摄像头能绕其自身轴线进行360
°
旋转。
11.作进一步优化,所述步骤f具体为:当样件座运动到检测组件(即第五龙门架)正下方时,停止样件座的运动,启动第四运动机构下移,内窥摄像头分别伸入收口筒形零件内部后、同时以收口筒形零件的轴线为圆心进行内窥摄像头边下移边转动的摄像过程;到达指定位置后,第四运动机构上移,同时以收口筒形零件的轴线为圆心进行内窥摄像头边上移边转动的摄像过程,输出摄像结果。
12.作进一步优化,所述渗透探伤设备还包括计算机、供气装置、驱动系统及抽风集液装置;所述计算机设置在所述第五龙门架的一侧且计算机与所述内窥摄像头电性连接;所述供气装置设分别与所述渗透喷枪、清洗喷枪、显像喷枪连通,供气装置向各喷枪提供压缩气体;所述驱动系统分别与所述样件座、第一运动机构、第二运动机构、第三运动机构、第四运动机构电性连接,用于控制各机构间的运动协调;所述抽风集液装置设置在所述工作台下侧且与各个通孔连通,所述台阶孔内设置贯穿样件座的导流口,通过抽风集液装置从收口筒形零件底部、并通过导流口将雾化或滴落的喷涂材料(即渗透剂、清洗剂、显像剂)吸走并储存。
13.优选的,所述供气装置提供的气压为0.1~0.5mpa。
14.优选的,所述导流口直径大于收口筒形零件底部孔的直径。
15.作进一步优化,所述第一斜喷口的直径为所述第二斜喷口直径的1/3。
16.作进一步优化,所述第一斜喷口与所述第二斜喷口的数量一致,且不少于3个。喷口的数量根据收口筒形零件的内径确定,若收口筒形零件内径小于10mm,则第一斜喷口与第二斜喷口的数量均为3个且各喷口(即第一斜喷口与第二斜喷口,下同)之间的间隔角度为60
°
;若收口筒形零件内径为10mm~30mm,则第一斜喷口与第二斜喷口的数量均为4个且各喷口之间的间隔角度为45
°
;若收口筒形零件内径大于30mm,则第一斜喷口与第二斜喷口
的数量为5个及以上且各喷口之间的间隔角度一致。
17.作进一步优化,所述第一斜喷口圆心与所述第二斜喷口圆心在轴向的间距为收口筒形零件内径的1/2~3/4。
18.作进一步优化,所述第一斜喷口与收口筒形零件的斜肩角度为85
°
~90
°
;所述第二斜喷口与喷嘴轴线的角度为70
°±3°
。
19.作进一步优化,所述喷管高于所述定位块的一段内部设置隔断板且所述隔断板将此段喷管均匀分成第一进气通道与第二进气通道,所述第一进气通道与所述第一斜喷段通过软管连通,所述第二进气通道与所述第二斜喷段通过软管连通。
20.优选的,所述第一进气通道与所述第一斜喷段之间的软管、所述第二进气通道与所述第二斜喷段之间的软管连通设置在运动机构内部(即第一运动机构、第二运动机构、第三运动机构)的储存腔,通过第一进气通道或第二进气通道的气压带动储存腔内的喷涂材料(即渗透剂、清洗剂、显像剂)向第一斜喷段或第二斜喷段运动,从而通过第一斜喷口或第二斜喷口喷出。
21.作进一步优化,所述隔断板上端设置一比例阀挡板,通过比例阀挡板调节进入第一进气通道与第二进气通道的气压比例,进而调节第一斜喷段与第二斜喷段的气压比例。
22.本发明具有如下技术效果:本技术方法通过喷嘴、定位块、密封块及喷管的结构配合,通过第一斜喷段及第二斜喷段的喷嘴结构精细化设置,避免了现有技术采用喷嘴自转方式或零件自转方式使得涂层厚度均匀性控制繁琐的问题,从而解决了涂层材料在接头处厚度难以控制的问题;同时,本技术方法解决了收口筒形零件斜肩处涂层(即渗透剂、显像剂)制备困难、挂壁性差、喷涂均匀性差的问题,实现了直筒与斜肩部位的渗透剂或显像剂涂层厚度一致、均匀性好、挂壁性好,涂层厚度(包括斜肩涂层厚度)均匀性达到
±
5μm,从而有效避免由于渗透剂或显像剂不均匀、流挂性差而造成检测精度差,甚至出现检测死角的问题。本技术方法通过渗透剂喷涂过程、清洗剂喷涂过程、烘干过程、显像剂喷涂过程及缺陷检测过程的配合,实现自动化、连续化、大批量检测,自动化程度高,可连续不停机进行检测,有效提高工作效率、节省检测的时间;同时,本技术收口筒形零件缺陷的检测方法除筒形零件的装卸之外,其余步骤均为自动化工序,无需人工操作,能够节省大量劳动生产力、降低生产强度。
附图说明
23.图1为本发明实施例中自动化探伤系统的整体结构示意图。
24.图2为本发明实施例中自动化探伤系统的样件座的结构示意图。
25.图3为本发明实施例中自动化探伤系统的渗透喷枪、清洗喷枪或显像喷枪的结构示意图。
26.图4为本发明实施例中自动化探伤系统的喷嘴的结构示意图;其中图4(a)为立体图;图4(b)为剖视图。
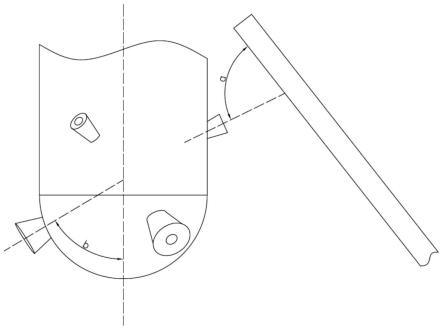
27.图5为本发明实施例中自动化探伤系统的喷嘴喷涂过程中的示意图。
28.图6为本发明实施例中自动化探伤系统的喷管的结构示意图。
29.其中,10、工作台;101、通孔;20、滑轨;30、样件座;301、台阶孔;302、导流口;40、渗透组件;41、渗透喷枪;411、喷嘴;4111、第一斜喷段;41110、第一斜喷口;4112、第二斜喷段;
41120、第二斜喷口;412、定位块;4121、下部斜锥段;4122、直线段;413、密封块;414、喷管;4140、比例阀挡板;4141、隔断板;4142、第一进气通道;4143、第二进气通道;42、第一运动机构;420、储存腔;43、渗透导轨;44、第一龙门架;50、清洗组件;51、清洗喷枪;52、第二运动机构;53、清洗导轨;54、第二龙门架;60、烘干组件;61、烘干风机;62、第三龙门架;70、显像组件;71、显像喷枪;72、第三运动机构;73、显像导轨;74、第四龙门架;80、检测组件;81、内窥摄像头;82、第四运动机构;83、内窥导轨;84、第五龙门架;90、收口筒形零件;91、计算机;92、供气装置;93、驱动系统;94、抽风集液装置。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
31.实施例:如图1~6所示,一种用于自动检测收口筒形件缺陷的方法,其特征在于:采用自动化探伤系统,自动化探伤系统包括工作台10、滑轨20、样件座30、渗透组件40、清洗组件50、烘干组件60、显像组件70及检测组件80;滑轨20固定设置在工作台10上端面的两侧,样件座30设置在滑轨20上且样件座30与滑轨20滑动连接;工作台10一端上侧固定设置检测组件80且工作台10上侧由靠近到远离检测组件80依次设置显像组件70、烘干组件60、清洗组件50与渗透组件40(如图1所示),工作台10表面对应显像组件70、烘干组件60、清洗组件50与渗透组件40分别开设一通孔101(如图1所示);样件座30上设置用于安装收口筒形零件90的台阶孔301;渗透组件40包括渗透喷枪41、第一运动机构42、渗透导轨43及第一龙门架44;第一龙门架44与工作台10两侧及地面固定连接,第一龙门架44中部且对应通孔101固定设置一渗透导轨43,第一运动机构42与渗透导轨43滑动连接且第一运动机构42下端设置若干渗透喷枪41(如图1所示);清洗组件50包括清洗喷枪51、第二运动机构52、清洗导轨53及第二龙门架54;第二龙门架54与工作台10两侧及地面固定连接,第二龙门架54中部且对应通孔101固定设置一清洗导轨53,第二运动机构52与清洗导轨53滑动连接且第二运动机构52下端设置若干清洗喷枪51(如图1所示);烘干组件60包括烘干风机61与第三龙门架62,第三龙门架62与工作台10两侧及地面固定连接,第三龙门架62中部且对应通孔101固定设置一烘干风机62(如图1所示);显像组件70包括显像喷枪71、第三运动机构72、显像导轨73及第四龙门架74;第四龙门架74与工作台10两侧及地面固定连接,第四龙门架74中部且对应通孔101固定设置一显像导轨73,第三运动机构72与显像导轨73滑动连接且第三运动机构72下端设置若干显像喷枪71;渗透喷枪41、清洗喷枪51与显像喷枪71均包括喷嘴411、定位块412、密封块413及喷管414;定位块412由下部斜锥段4121与直线段4122组成且直线段4122上端与对应运动机构固定连接(即渗透喷枪41上的直线段4122与第一运动机构42固定连接、清洗喷枪51上的直线段4122与第二运动机构52固定连接、显像喷枪71上的直线段4122与第三运动机构72固定连接),密封块413套接在定位块412外壁且定位块412的直线段4122与密封块413滑动连接;喷嘴411设置在定位块412下端,包括第一斜喷段4111及第二斜喷段4112,第一斜喷段4111为圆筒状、其外壁且绕其中轴线均匀分布若干向上倾斜的第一斜喷口41110,第二斜喷段4112为半球状、其外壁且绕其中轴线均匀分布若干向下倾斜的第二斜喷口41120(如图4
所示),第一斜喷段4111与第二斜喷段4112螺纹连接(第一斜喷段4111与第二斜喷段4112之间不连通)且第一斜喷口41110与第二斜喷口41120错位均匀分布(即第二斜喷口41120位于相邻两个第一斜喷口41110连线的中线上,第一斜喷口41110位于相邻两个第二斜喷口41120连线的中线上,如图4所示);第一斜喷口41110的直径为第二斜喷口41120直径的1/3,第一斜喷口41110圆心与第二斜喷口41120圆心在轴向的间距为收口筒形零件90内径的1/2~3/4,第一斜喷口41110与收口筒形零件90的斜肩角度a为85
°
~90
°
(如图5所示,优选87
°
);第二斜喷口41120与喷嘴411轴线的角度b为70
°±3°
(如图5所示,优选70
°
)。喷嘴411上端(即第一斜喷段4111上端)固定连接喷管414且喷管414贯穿定位块412;喷嘴411、定位块412、密封块413与喷管414共轴线。第一斜喷口41110与第二斜喷口41120的数量一致,且不少于3个。喷口(即第一斜喷口41110与第二斜喷口41120)的数量根据收口筒形零件90的内径确定,若收口筒形零件90内径小于10mm,则第一斜喷口41110与第二斜喷口41120的数量均为3个且各喷口(即第一斜喷口41110与第二斜喷口41120,下同)之间的间隔角度为60
°
(如图4所示);若收口筒形零件90内径为10mm~30mm,则第一斜喷口41110与第二斜喷口41120的数量均为4个且各喷口之间的间隔角度为45
°
;若收口筒形零件90内径大于30mm,则第一斜喷口41110与第二斜喷口41120的数量为5个及以上且各喷口之间的间隔角度一致。
32.检测组件80包括内窥摄像头81、第四运动机构82、内窥导轨83及第五龙门架84;第五龙门架84与工作台10两侧及地面固定连接,第五龙门架84中部固定设置一内窥导轨83,第四运动机构82与内窥导轨83滑动连接且第四运动机构82下端设置若干内窥摄像头81,内窥摄像头81能绕其自身轴线进行360
°
旋转。
33.内窥摄像头81、显像喷枪71、清洗喷枪51、渗透喷枪41的数量均与台阶孔301的数量相对应(如图1所示)。
34.渗透探伤设备还包括计算机91、供气装置92、驱动系统93及抽风集液装置94;计算机91设置在第五龙门架84的一侧且计算机91与内窥摄像头81电性连接;供气装置92设分别与渗透喷枪41、清洗喷枪51、显像喷枪71连通,供气装置92向各喷枪提供压缩气体;驱动系统93分别与样件座30、第一运动机构42、第二运动机构52、第三运动机构72、第四运动机构82电性连接,用于控制各机构间的运动协调;抽风集液装置94设置在工作台10下侧且与各个通孔101连通,台阶孔301内设置贯穿样件座30的导流口302,通过抽风集液装置94从收口筒形零件90底部、并通过导流口302将雾化或滴落的喷涂材料(即渗透剂、清洗剂、显像剂)吸走并储存。导流口302直径大于收口筒形零件90底部孔的直径。
35.喷管414高于定位块412的一段内部设置隔断板4141且隔断板4141将此段喷管414均匀分成第一进气通道4142与第二进气通道4143(如图6所示),第一进气通道4142与第一斜喷段4111通过软管连通,第二进气通道4143与第二斜喷段4112通过软管连通。
36.第一进气通道4142与第一斜喷段4111之间的软管、第二进气通道4143与第二斜喷段4112之间的软管连通设置在运动机构内部(即第一运动机构42、第二运动机构52、第三运动机构72)的储存腔420,通过第一进气通道4142或第二进气通道4143的气压带动储存腔420内的喷涂材料(即渗透剂、清洗剂、显像剂)向第一斜喷段4111或第二斜喷段4112运动,从而通过第一斜喷口41110或第二斜喷口41120喷出。
37.隔断板4141上端设置一比例阀挡板4140,通过比例阀挡板4140调节进入第一进气通道4142与第二进气通道4143的气压比例,进而调节第一斜喷段4111与第二斜喷段4112的
气压比例(如图6所示)。
38.自动检测收口筒形零件内壁的方法具体为:a、零件放置:初始位置时样件座30位于所述渗透组件40远离所述清洗组件50的一侧(如图1所示);先将待检测的收口筒形零件90分别放入所述台阶孔301内并实现固定,再通过启动驱动系统93控制样件座30在滑轨20上滑动;b、渗透剂喷涂过程:当样件座30运动到第一龙门架44正下方时(即第一龙门架44对应的通孔101正上方时,可通过在第一龙门架44上设置限位传感器实现,此为本领域的常规技术,本技术不做具体论述,下同),停止样件座30运动、启动第一运动机构42下移,第一运动机构42带动渗透喷枪41下移,直至渗透喷枪41的喷嘴411分别伸入对应的收口筒形零件90内且渗透喷枪41的密封块413下端与收口筒形零件90口部上端接触;然后启动渗透喷枪41,实现第一运功机构42边下移边渗透喷涂的过程,直至到达指定位置,关闭渗透喷枪41,启动第一运动机构42上移回到初始位置;c、清洗剂喷涂过程:完成渗透剂喷涂后、静止不动保持1~2min(使渗透剂能有足够时间渗入缺陷内)、再启动样件座30向靠近第二龙门架54方向运动,当样件座30运动到第二龙门架54正下方时(即第二龙门架54对应的通孔101正上方时),停止样件座30运动并启动第二运动机构52下移,第二运动机构52带动清洗喷枪51下移,直至清洗喷枪51的喷嘴411分别伸入对应的收口筒形零件90内且清洗喷枪51的密封块413下端与收口筒形零件90口部上端接触;然后启动清洗喷枪51,实现第二运功机构52边下移边清洗喷涂的过程,直至到达指定位置,关闭清洗喷枪51,启动第二运动机构52上移回到初始位置;d、烘干过程:完成清洗剂喷涂后、启动样件座30向靠近第三龙门架62方向运动,当样件座30运动到第三龙门架62正下方时(即第三龙门架62对应的通孔101正上方时),停止样件座30运动并启动烘干风机61运转,实现对收口筒形零件90内壁的烘干;温度为50~60℃,烘干时间为1~3min;e、显像剂喷涂过程:完成烘干后、启动样件座30向靠近第四龙门架74方向运动,当样件座30运动到第四龙门架74正下方时(即第四龙门架74对应的通孔101正上方时),停止样件座30运动并启动第三运动机构72下移,第三运动机构72带动显像喷枪71下移,直至显像喷枪71的喷嘴411分别伸入对应的收口筒形零件90内且显像喷枪71的密封块413下端与收口筒形零件90口部上端接触;然后启动显像喷枪71,实现第三运功机构72边下移边显像喷涂的过程,直至到达指定位置,关闭显像喷枪71,启动第三运动机构72上移回到初始位置;f、缺陷检测过程:完成显像剂喷涂后、启动样件座30向靠近检测组件80的方向运动,当样件座30运动到检测组件80(即第五龙门架84)正下方时,停止样件座30的运动,启动第四运动机构82下移,内窥摄像头81分别伸入收口筒形零件90内部后、同时以收口筒形零件90的轴线为圆心进行内窥摄像头81边下移边转动的摄像过程;到达指定位置后,第四运动机构82上移,同时以收口筒形零件90的轴线为圆心进行内窥摄像头81边上移边转动的摄像过程,输出摄像结果、输出结构传输到计算机91内进行图像缺陷判断(可通过图像处理进行判断、也可通过人工观察测量进行判断)。
39.渗透喷枪41、清洗喷枪51、显像喷枪71的启动方式为:首先启动供气装置92向喷枪(即渗透喷枪41、清洗喷枪51或显像喷枪71)的喷管414提供压缩气体,压缩气体经隔断板
4141与比例阀挡板4140以一定的比例分别进入第一进气通道4142与第二进气通道4143,然后通过软管压缩储存腔420内的喷涂材料(即渗透剂、清洗剂或显像剂),使喷涂材料(即渗透剂、清洗剂或显像剂)分别进入第一斜喷段4111与第二斜喷段4112、并通过第一斜喷口41110与第二斜喷口41120喷出,实现渗透喷枪41喷出渗透剂、清洗喷枪51喷出清洗剂、显像喷枪71喷出显像剂的功能。其中,供气装置92提供的气压为0.1~0.5mpa,根据收口筒形零件的内径决定,一般而言,内径减小则气压相应降低。
40.上述步骤b、c、d、e中,收口筒形零件90内的雾化及喷涂材料通过启动抽风集液装置84进行吸收并储存(即在渗透剂喷涂过程中、清洗剂喷涂过程中、烘干过程中、显像剂喷涂过程中,均同时启动抽风集液装置84);抽风的强度通过经验及多次试验获得,防止喷涂材料飘散的同时避免过强风影响喷涂的均匀性。
41.渗透剂喷涂过程中、清洗剂清洗过程中与显像剂喷涂过程中,可通过调整喷涂实施过程中喷枪上下移动速度或压缩空气气压,调整渗透剂层、显像剂层的厚度及清洗剂清洗的干净程度(此为本领域的常规技术,本技术不做具体论述)。
42.检测组件80检测过程中,可通过调节内窥摄像头81的转动速度与下移速度,调整摄取的图像的质量(此为本领域的常规技术,本技术不做具体论述)。
43.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1