一种三轴加速度计灵敏度系数同步冲击校准方法与装置
1.本发明属于加速度计校准技术领域,具体涉及一种对三轴加速度计灵敏度系数,包括轴向灵敏度系数与轴间灵敏度系数,进行同步冲击校准的方法与装置。
背景技术:
2.加速度计广泛应用于振动、冲击测试等领域,在工程实践与科学研究中具有重要作用。按输入轴的数目划分,加速度计通常可分为单轴、双轴和三轴加速度计。特别地,单轴加速度计是指只能沿某一个方向测量加速度的加速度计,而三轴加速度计是指能够沿三个坐标轴方向同时测量加速度的加速度计。工程实际中,通常要求对空间中的三维加速度进行测量,因此三轴加速度计具有相对较高的实用价值。
3.灵敏度系数校准是加速度计设计、生产中不可或缺的关键环节之一,准确有效的灵敏度校准是保证加速度计测量精度的基本前提,而实现三轴加速度计灵敏度的校准在技术上有一定的难度。主要体现在三轴加速度计的校准对载荷激励的同步性有要求,即要求校准装置沿三轴加速度计各敏感轴方向激励的载荷不仅能够被准确计量,还要在时间上保持同步。对于脉宽仅为毫秒甚至更低量级的冲击载荷而言,要实现沿三轴方向的同步激励有较高的技术要求。
4.目前,三轴加速度计的校准方法可以归纳为两种:单轴依次校准法和同步校准法。单轴依次校准法是采用单轴加速度计的校准方式对三轴加速度计的各个敏感轴进行依次校准。由于各敏感轴不能同时受载,该方法的不足是难以对轴间耦合灵敏度系数进行准确的评估。
5.同步校准法是对三轴加速计的各敏感轴进行同步加载和校准。常见的三轴加速度计同步校准方法可归纳为三种:重力加速度分解法、三轴振动法和三轴冲击法。
6.所谓重力加速度分解法,是指通过调整加速度计的安装姿态,将加速度计自身的重力加速度分解到三个敏感轴上,从而实现三轴加速度计同步加载的校准方法。例如,专利cn113295887a公开了一种基于重力加速度分解的三轴加速度计灵敏度系数校准方法。
7.所谓三轴振动法,是指采用三轴激振器(由三个两两垂直分布的单轴激振器构成)激励同步载荷的校准方法。例如,专利cn105137122a和专利cn106199073分别公开了一种采用三轴激振器,并分别以滑槽滑块和平面空气轴承作为解耦装置的三轴加速度计校准方法和装置。
8.所谓三轴冲击法,是指对三轴加速度计进行同步冲击加载的校准方法。例如,专利cn108548942b公开了一种基于真三轴hopkinson杆的高g值三轴加速度计同步校准方法和装置。
9.上述方法和装置虽然能在一定范围内实现三轴加速度计的同步校准,但均具有相当程度的局限性。例如,重力加速度分解法沿三轴加速度计各敏感轴激励的加速度不会超过1g,因此该方法只适用于小量程三轴加速度计的校准。三轴振动法需同时使用三台激振器并配合解耦装置,机械结构复杂,工程造价高,难以推广应用;而且,振动校准方法中激励
的载荷为周期性振动载荷,而实际工程中加速度计所承受的载荷多为冲击(脉冲)载荷,用振动载荷校准得到的灵敏度系数测量冲击载荷是否会产生不容忽视的偏差,目前尚无定论。专利cn108548942b公开的三轴冲击法中,待校准三轴加速度计的各敏感轴均须通过螺栓固支于一个弹性框的内表面,这与目前广泛采用的三轴加速度计的装夹方式和使用模式都不适用,因此很难是在实际工程中得以应用。
10.综上,现有方法和装置均难以在普遍范围内实现对三轴加速度计的有效校准,尤其是同步的冲击校准,其核心问题在于不能沿三个坐标轴方向激励同步的冲击载荷。因此,开发一种能够实现三分量冲击载荷同步激励,进而实现对三轴加速度计同步冲击校准的方法和装置具有重大的工程应用价值和迫切的现实意义。
技术实现要素:
11.为了克服当前三轴加速度计同步校准方法和装置中存在的不能沿三坐标轴方向激励同步冲击载荷,进而无法实现三轴加速度计同步冲击校准的不足,本发明公开了一种三轴加速度计灵敏度系数同步冲击校准方法与装置。
12.本发明解决其技术问题采用的技术方案是:
13.一种三轴加速度计灵敏度系数同步冲击校准装置,主要包括:导向柱、无杆气缸、安装座、跌落平台、刹车机构、滑块、编码器、波形发生器、基座、标准单轴加速度计、安装座固定螺栓、波形发生器固定螺栓、空气压缩机、动态数据采集系统。
14.所述基座上设置有2个导向柱和2个无杆气缸,2个导向柱、2个无杆气缸均在所述基座上对称放置,所述导向柱和所述无杆气缸均与所述基座固定连接,所述导向柱和所述无杆气缸均竖直放置;所述波形发生器位于所述基座的上表面中心,所述波形发生器与所述基座通过波形发生器固定螺栓固定连接;所述编码器位于所述基座上,并与所述基座固定连接,位于所述无杆气缸的一侧。
15.所述基座为长方体形,基座下部设置有突台,突台上设置有用于与地面固定连接的地脚螺栓孔;基座上表面的中央设置有与波形发生器相连接的螺栓孔,螺栓孔为m16内螺纹螺栓孔;基座上表面对称设置与导向柱、无杆气缸相连接的盲孔。
16.所述滑块与所述无杆气缸的活塞固定连接,当处于非刹车状态时,所述滑块可以随着无杆气缸压力的增加向上带载移动。
17.所述滑块有2个,分别固定在所述跌落平台的两侧,所述滑块与所述编码器相连接。
18.所述跌落平台与所述刹车机构固定连接,所述刹车机构与所述导向柱相接,当处于非刹车状态时,所述跌落平台和刹车机构可以一同沿导向柱上下方向滑动;所述安装座位于所述跌落平台上侧,所述安装座与所述跌落平台通过安装座固定螺栓固定连接;标准单轴加速度计位于安装座上,并与安装座固定连接。
19.所述跌落平台上表面中心对称设置有与所述安装座相连接的螺纹孔,用于固定安装座。
20.所述跌落平台为实心结构,材质为45#钢。
21.所述安装座位于所述跌落平台上表面的中央,与所述跌落平台固定连接。
22.所述刹车机构位于跌落平台和导向柱之间,与空气压缩机一起用于跌落平台的制
动。
23.所述编码器用于记录所述滑块的高度值。
24.所述空气压缩机位于基座的一侧,与无杆气缸、刹车机构分别相连接,用于给无杆气缸、刹车机构提供压缩空气。
25.所述动态数据采集系统位于所述基座的一侧,与所述标准单轴加速度计、待校准三轴加速度计相连接,用于采集标准单轴加速度计、待校准三轴加速度计的输出信号。
26.上述的三轴加速度计灵敏度系数同步冲击校准装置,所述导向柱共有2根,长度方向垂直地面,用于限定所述跌落平台和所述刹车机构的滑动路径,当装置处于非刹车状态时,所述跌落平台和所述刹车机构可以沿导向柱自由滑落;当处于刹车状态时,所述刹车机构可以将所述跌落平台连同其本身抱死在导向柱上。刹车机构为气压碟刹刹车机构,
27.上述的三轴加速度计灵敏度系数同步冲击校准装置,所述无杆气缸为单向可控气缸,接通空气压缩机气源时可驱动所述滑块向上带载运动,断开空气压缩机气源后滑块失去动力自由滑落。单个无杆气缸的最大推力不低于跌落平台、安装座重力总和的60%。
28.上述的三轴加速度计灵敏度系数同步冲击校准装置,所述安装座为整体结构,可分为安装座基底和安装座主体两部分,安装座主体在上,安装座基底在下;安装座基底为长方体形板,设置有与跌落平台固定连接的螺栓孔;安装座主体为竖直截面为直角梯形的五棱柱体,即水平放置的五棱柱体,所述标准单轴加速度计位于安装座主体的上表面中央,即安装座平面中央,粘接固定;直角梯形斜边所对应的面称为斜面,待校准三轴加速度计安装于斜面中心。
29.上述的三轴加速度计灵敏度系数同步冲击校准装置,所述编码器包括钢丝线、转子、数字显示表,所述钢丝线一端缠绕于转子,一端与滑块相连接,所述转子与所述数字显示表相接,所述数字显示表显示所述滑块的高度,间接反映了跌落平台的高度。编码器测量值由数字显示表显示,所述数字显示表和所述转子位于基座上表面,与所述基座固定相接,所述数字显示表和所述转子位于所述无杆气缸的一侧。
30.上述的三轴加速度计灵敏度系数同步冲击校准装置,所述波形发生器主体呈片状,材质为橡胶,其上端面为带有一定曲率的弧面,下端面为平面。
31.一种三轴加速度计灵敏度系数同步冲击校准装置校准方法,具体步骤如下:
32.步骤1,安装待校准三轴加速度计
33.将待校准三轴加速度计固定在校准装置的安装座斜面中心处,固定方式采用粘接。
34.待校准三轴加速度计固定后,以待校准三轴加速度计为中心,建立三维坐标系。使待校准三轴加速度计的z轴垂直于安装座斜面,x轴、y轴平行于安装座斜面,x轴与斜面纵向中心线之间的角度为β,z轴相对竖直方向的夹角为α,即安装座斜面相对水平面的倾斜角为α。
35.步骤2,提升跌落平台
36.位于跌落平台上的标准单轴加速度计、待校准三轴加速度计升至预定高度。
37.步骤3,跌落冲击
38.位于跌落平台上的标准单轴加速度计、待校准三轴加速度计由预定高度随跌落平台一同下落。
39.步骤4,采集数据
40.自步骤3跌落冲击开始时,动态数据采集系统记录标准单轴加速度计以及待校准三轴加速度计的输出信号,采集数据至跌落冲击完成为止。
41.选用动态数据采集系统采集到的各敏感轴输出信号的峰值、标准单轴加速度计输出信号的峰值,各敏感轴为步骤1中待校准三轴加速度计三维坐标系的x轴、y轴、z轴。
42.待校准三轴加速度计在x轴、y轴、z轴输出信号的峰值分别记为u
x
、uy、uz。
43.标准单轴加速度计输出信号的峰值记为u
ref
。
44.步骤5,求取待校准三轴加速度计敏感轴输入加速度
45.待校准三轴加速度计敏感轴输入加速度即为x轴、y轴、z轴输入加速度,分别记为a
x
、ay、az。敏感轴输入加速度计算式如下:
[0046][0047]
式(1)中,a
ref
为参考加速度。
[0048]
参考加速度a
ref
通过步骤4中标准单轴加速度计输出信号的峰值u
ref
乘以标准单轴加速度计的灵敏度系数获得,标准单轴加速度计的灵敏度系数为已知量。
[0049]
步骤6,求取待校准三轴加速度计的输入矩阵a和输出矩阵u
[0050]
重复步骤2-5,重复次数为n,n大于等于3次,即n为大于等于3的自然数,得到n组待校准三轴加速度计的在x轴、y轴、z轴输出信号的峰值,以及n组x轴、y轴、z轴输入加速度。
[0051]
待校准三轴加速度计的输入矩阵a,按下式计算:
[0052][0053]
式(2)中,矩阵内的输入的加速度下标数字表示第n次,对应第n次的输入的加速度。
[0054]
输入矩阵a的列为第n次待校准三轴加速度计在x轴、y轴、z轴输入的加速度,第一行、第二行、第三行分别为待校准三轴加速度计在x轴、y轴、z轴的输入加速度。
[0055]
待校准三轴加速度计的输出矩阵u,按下式计算:
[0056][0057]
式(3)中,矩阵内的输出信号的峰值下标数字表示第n次,对应第n次的输出信号的峰值。
[0058]
输出矩阵u的列为第n次待校准三轴加速度计在x轴、y轴、z轴输出信号的峰值,第一行、第二行、第三行分别为待校准三轴加速度计在x轴、y轴、z轴输出信号的峰值。
[0059]
步骤7,计算待校准三轴加速度计的灵敏度系数
[0060]
待校准三轴加速度计的灵敏度系数矩阵s为:
[0061]
s=ua
t
(aa
t
)-1
ꢀꢀꢀ
(4)
[0062]
式(4)中,t为矩阵关系符号,表示矩阵转置。
[0063]
由式(4)得到灵敏度系数矩阵s,灵敏度系数矩阵s主对角线上的元素为待校准三轴加速度计的主灵敏度系数,其余元素为轴间灵敏度系数。
[0064]
至此,得到待校准三轴加速度计的灵敏度系数。
[0065]
上述的三轴加速度计灵敏度系数同步冲击校准方法,所述步骤2,提升跌落平台的过程进一步包括:
[0066]
使校准装置的刹车机构处于松开状态,无杆气缸接通空气压缩机,跌落平台抬升至预定高度,刹车机构接通空气压缩机,跌落平台和刹车机构一同被抱死在导向柱的预定高度处,编码器记录滑块此时的高度。
[0067]
上述的三轴加速度计灵敏度系数同步冲击校准方法,所述步骤3,跌落冲击的过程进一步包括:
[0068]
无杆气缸断开空气压缩机,滑块自由滑落至设备基座上。刹车机构断开空气压缩机,即松开刹车,同时启动动态数据采集系统,跌落平台和刹车机构、滑块、以及固定在跌落平台上的安装座、标准单轴加速度计、待校准三轴加速度计竖直向下沿导向柱自由下落,直至跌落平台下表面与波形发生器上表面发生碰撞,跌落冲击完成。
[0069]
本发明的有益效果是:
[0070]
一种三轴加速度计灵敏度系数同步冲击校准方法,可以在各敏感轴同时受到冲击载荷的情况下得到三轴加速度计的主灵敏度系数与轴间耦合灵敏度系数,即可以实现三轴加速度计的同步冲击校准。
[0071]
一种三轴加速度计灵敏度系数同步冲击校准装置,不仅能够沿三坐标轴方向激励同步的冲击载荷,还能通过改变垂直跌落台跌落高度与波形发生器材料等简单操作灵活地对激励载荷的峰值和脉宽进行调节,在相当宽范围内实现对不同量程三轴加速度计的同步冲击校准。
[0072]
本发明的推广和使用将进一步提升我国在传感器校准技术领域的水平。
附图说明
[0073]
下面结合附图和实施例对本发明进一步说明。
[0074]
图1为本发明校准装置主视图;
[0075]
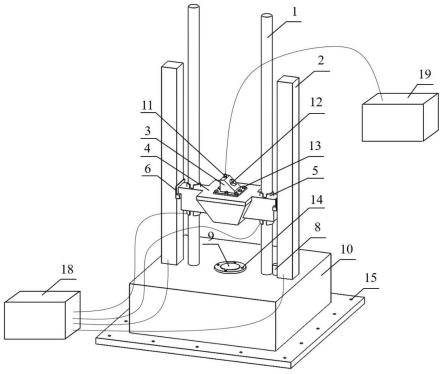
图2为本发明校准装置立体图;
[0076]
图3为基于矢量分解的三轴加速度计同步冲击加载原理示意图。
[0077]
图中:1.导向柱;2.无杆气缸;3.安装座;4.跌落平台;5.刹车机构;6.滑块;7.钢丝线;8.编码器;9.波形发生器;10.基座。11.标准单轴加速度计;12.待校准三轴加速度计;13.加速度计安装座固定螺栓;14.波形发生器固定螺栓;15.地脚螺栓孔;16.安装座平面;17.安装座斜面;18.空气压缩机;19.动态数据采集系统。
具体实施方式
[0078]
实施例
[0079]
一种三轴加速度计灵敏度系数同步冲击校准装置,如图1、图2所示,主要包括:导向柱1、无杆气缸2、安装座3、跌落平台4、刹车机构5、滑块6、编码器8、波形发生器9、基座10、
标准单轴加速度计11、安装座固定螺栓13、波形发生器固定螺栓14、空气压缩机18、动态数据采集系统19。
[0080]
如图1、图2所示,基座10上设置有2个导向柱1和2个无杆气缸2,2个导向柱1、2个无杆气缸2均在基座10上对称放置,导向柱1和无杆气缸2均与基座10固定连接,导向柱1和无杆气缸2均竖直放置;波形发生器9位于基座10的上表面中心,波形发生器9与基座10通过波形发生器固定螺栓14固定连接;编码器8位于基座10上,并与基座10固定连接,位于无杆气缸2的一侧。
[0081]
滑块6与无杆气缸2的活塞固定连接,当处于非刹车状态时,滑块6可以随着无杆气缸2压力的增加向上带载移动。
[0082]
滑块6有2个,分别固定在跌落平台4的两侧,滑块6与编码器8相连接。
[0083]
跌落平台4与刹车机构5固定相接,刹车机构5与导向柱1相接,当处于非刹车状态时,跌落平台4和刹车机构5可以一同沿导向柱1上下方向滑动;安装座3位于跌落平台4上侧,安装座3与跌落平台4通过安装座固定螺栓13固定连接;标准单轴加速度计11位于安装座3上,并与安装座3固定连接。
[0084]
刹车机构5位于跌落平台4和导向柱1之间,与空气压缩机18一起用于跌落平台4的制动。
[0085]
编码器8用于记录滑块6的高度值。
[0086]
空气压缩机18位于基座10的一侧,与无杆气缸2、刹车机构5分别相连接,用于给无杆气缸2、刹车机构5提供压缩空气。
[0087]
动态数据采集系统19位于基座10的一侧,与标准单轴加速度计11、待校准三轴加速度计12相连接,用于采集标准单轴加速度计11、待校准三轴加速度计12的输出信号。
[0088]
导向柱1共有2根,长度方向垂直地面,用于限定跌落平台4和刹车机构5的滑动路径,当装置处于非刹车状态时,跌落平台4和刹车机构5可以沿导向柱1自由滑落;当处于刹车状态时,刹车机构5可以将跌落平台4连同其本身抱死在导向柱1上。
[0089]
导向柱1为不锈钢柱。
[0090]
无杆气缸2为单向受控气缸,接通空气压缩机18气源时可驱动滑块6向上带载运动,断开空气压缩机18气源后滑块6失去动力自由滑落。单个无杆气缸2的最大推力不低于跌落平台4、安装座3重力总和的60%。
[0091]
基座10为同步冲击校准装置的基础,起到支撑和稳定的作用。基座10为长方体形,基座10下部设置有突台,突台上设置有用于与地面固定连接的地脚螺栓孔15;基座10上表面的中央设置有与波形发生器9相连接的螺栓孔,螺栓孔为m16内螺纹螺栓孔;基座10上表面对称设置与导向柱1、无杆气缸2相连接的盲孔。
[0092]
如图3所示,安装座3为整体结构,可分为安装座基底和安装座主体两部分,安装座主体在上,安装座基底在下;安装座基底为长方体形板,设置有与跌落平台4固定连接的螺栓孔;安装座主体为竖直截面为直角梯形的五棱柱体,即水平放置的五棱柱体,标准单轴加速度计11位于安装座主体的上表面中央,即安装座平面16中央,粘接固定;直角梯形斜边所对应的面称为斜面,待校准三轴加速度计安装于斜面中心。
[0093]
安装座3位于跌落平台4的安装座平面16中央,与跌落平台4固定连接。跌落平台4上安装座平面16中心对称设置有与安装座3相连接的螺纹孔,用于固定安装座3。
[0094]
跌落平台4为实心结构,材质为45#钢。
[0095]
刹车机构5为气压碟刹刹车机构,刹车机构5的气源由空气压缩机提供。
[0096]
编码器8包括钢丝线7、转子、数字显示表,钢丝线7一端缠绕于转子,一端与滑块6相连接,转子与数字显示表相接,数字显示表显示滑块6的高度,间接反映了跌落平台4的高度。编码器测量值由数字显示表显示,数字显示表和转子位于基座10上表面,与基座10固定相接,数字显示表和转子位于无杆气缸2的一侧。
[0097]
波形发生器9主体呈片状,材质为橡胶,其上端面为带有一定曲率的弧面,下端面为平面。用于跌落平台4的缓冲,使标准单轴加速度计11、待校准三轴加速度计12的冲击载荷为近似半正弦加速度脉冲。
[0098]
标准单轴加速度计11为已根据单轴加速度计校准标准校准过的加速度计,灵敏度系数已知。
[0099]
一种三轴加速度计灵敏度系数同步冲击校准方法,以三轴加速度计灵敏度系数同步冲击校准装置为主要设备,对待校准三轴加速度计12实施校准,得到待校准三轴加速度计的灵敏度系数。校准的具体步骤如下:
[0100]
步骤1,安装待校准三轴加速度计12
[0101]
将待校准三轴加速度计12固定在校准装置的安装座斜面17中心处,固定方式采用粘接,例如,瞬干环氧胶粘接、双组分环氧胶粘接。
[0102]
待校准三轴加速度计12固定后,以待校准三轴加速度计12为中心,建立三维坐标系。使待校准三轴加速度计12的z轴垂直于安装座斜面17,x轴、y轴平行于安装座斜面17,x轴与斜面纵向中心线之间的角度为β,z轴相对竖直方向的夹角为α,即安装座斜面17相对水平面的倾斜角为α。
[0103]
步骤2,提升跌落平台4
[0104]
提升跌落平台4,即位于跌落平台4上的标准单轴加速度计11、待校准三轴加速度计12升至预定高度。
[0105]
提升跌落平台的过程是:
[0106]
使校准装置的刹车机构5处于松开状态,无杆气缸2接通空气压缩机18,跌落平台4抬升至预定高度,刹车机构5接通空气压缩机18,跌落平台4和刹车机构5一同被抱死在导向柱1的预定高度处,编码器8记录滑块6此时的高度。
[0107]
步骤3,跌落冲击
[0108]
跌落冲击即位于跌落平台4上的标准单轴加速度计11、待校准三轴加速度计12由预定高度随跌落平台4一同下落。
[0109]
跌落冲击的过程是:
[0110]
无杆气缸2断开空气压缩机18,滑块6自由滑落至设备基座10上。刹车机构5断开空气压缩机18,即松开刹车,同时启动动态数据采集系统19,跌落平台4和刹车机构5、滑块6、以及固定在跌落平台4上的安装座3、标准单轴加速度计11、待校准三轴加速度计12竖直向下沿导向柱1自由下落,直至跌落平台4下表面与波形发生器9上表面发生碰撞,跌落冲击完成。
[0111]
步骤4,采集数据
[0112]
在步骤3跌落冲击松开刹车的同时,动态数据采集系统19记录标准单轴加速度计
11以及待校准三轴加速度计12的输出信号,采集数据至跌落冲击完成为止。
[0113]
选用动态数据采集系统19采集到的各敏感轴输出信号的峰值、标准单轴加速度计11输出信号的峰值,各敏感轴为步骤1中待校准三轴加速度计12三维坐标系的x轴、y轴、z轴。
[0114]
待校准三轴加速度计12在x轴、y轴、z轴输出信号的峰值分别记为u
x
、uy、uz。
[0115]
标准单轴加速度计11输出信号的峰值记为u
ref
。
[0116]
步骤5,求取待校准三轴加速度计12敏感轴输入加速度
[0117]
待校准三轴加速度计12敏感轴输入加速度即为x轴、y轴、z轴输入加速度,分别记为a
x
、ay、az。敏感轴输入加速度计算式如下:
[0118][0119]
式(1)中,a
ref
为参考加速度。
[0120]
参考加速度a
ref
通过步骤4中标准单轴加速度计11输出信号的峰值u
ref
乘以标准单轴加速度计11的灵敏度系数获得,标准单轴加速度计11的灵敏度系数为已知量。
[0121]
步骤6,求取待校准三轴加速度计12的输入矩阵a和输出矩阵u
[0122]
重复步骤2-5,重复次数为n,n大于等于3次,即n为大于等于3的自然数,得到n组待校准三轴加速度计12的在x轴、y轴、z轴输出信号的峰值,以及n组x轴、y轴、z轴输入加速度。
[0123]
待校准三轴加速度计12的输入矩阵a,按下式计算:
[0124][0125]
式(2)中,矩阵内的输入的加速度下标数字表示第n次,对应第n次的输入的加速度。
[0126]
输入矩阵a的列为第n次待校准三轴加速度计12在x轴、y轴、z轴输入的加速度,第一行、第二行、第三行分别为待校准三轴加速度计12在x轴、y轴、z轴输入的加速度。
[0127]
待校准三轴加速度计12的输出矩阵u,按下式计算:
[0128][0129]
式(3)中,矩阵内的输出信号的峰值下标数字表示第n次,对应第n次的输出信号的峰值。
[0130]
输出矩阵u的列为第n次待校准三轴加速度计12在x轴、y轴、z轴输出信号的峰值,第一行、第二行、第三行分别为待校准三轴加速度计12在x轴、y轴、z轴输出信号的峰值。
[0131]
步骤7,计算待校准三轴加速度计12的灵敏度系数
[0132]
对于多轴加速度计而言,灵敏度系数包括主灵敏度系数和轴间灵敏度系数。
[0133]
待校准三轴加速度计12的灵敏度系数矩阵s为:
[0134]
s=ua
t
(aa
t
)-1
ꢀꢀꢀ
(4)
[0135]
式(4)中,t为矩阵关系符号,表示矩阵转置。
[0136]
由式(4)得到灵敏度系数矩阵s,灵敏度系数矩阵s主对角线上的元素为待校准三轴加速度计12的主灵敏度系数,其余元素为轴间灵敏度系数。
[0137]
至此,得到待校准三轴加速度计12的灵敏度系数。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1