一种薄膜表面缺陷检测系统及方法与流程
1.本技术涉及钙钛矿电池领域,特别涉及一种薄膜表面缺陷检测系统及方法。
背景技术:
2.在钙钛矿电池生产过程中,基本过程主要是一层层累置电池材料,关键工艺环节是制备三个高性能长寿命大面积薄膜层(电子传输层-钙钛矿层-空穴传输层),其中钙钛矿层是最核心的功能薄膜层,电池由其完成光电转换,钙钛矿薄膜质量的好坏直接影响钙钛矿电池质量的好坏。钙钛矿薄膜表面质量检测成了生产过程重要的一个环节,由于目前钙钛矿电池还没有完全解决“大面积”、“稳定工作”的痛点问题,因此尚未大规模应用,相关的生产企业还是依靠人眼、微观检测仪器完成钙钛矿薄膜质量的评估。采用人工肉眼检测的方法无法保证检测的一致性和效率,无法应用于大规模生产。而采用昂贵的微观科学检测仪器,因为费用昂贵、测试过程繁琐、测试耗时,只能在样品检测评估环节或者生产过程抽检,同样无法在实际生产线大规模应用。
3.另外一种基于机器视觉对钙钛矿薄膜质量进行检测的方法,采用带灯罩的无影光源、工业相机、集成支架以及控制中心等部件构成视觉检测系统,控制中心设置有图像处理单元用于将工业相机拍摄的图像与已保存在控制中心数据库中的标准图像进行比对和判断。其约束无影光源包括led(light-emitting diode,发光二极管)灯、卤钨灯、荧光灯中的任意一种灯珠,并提出总体照度大于1000lx。工业相机包括ccd(charge-coupled device,电荷耦合器件)相机、cmos(complementary metal oxide semiconductor,互补金属氧化物半导体)相机、数码相机中任意一种,拍摄像素在100万以上,根据描述其采用工业相机为面阵相机。然而该方案单纯从颜色上与样本颜色比对来评估结晶程度,进而对钙钛矿薄膜质量进行评估的方式比较片面;且所述的光源为单场复合光,只能得到一个通道的图像,因而无法有效获取各种类型缺陷表征。
4.因此,需要提供一种薄膜表面缺陷检测系统,来解决现有技术中钙钛矿薄膜质量评估采用微观实验仪器设备无法满足批量化生产的需求的问题,同时能够实现对缺陷的分类。
技术实现要素:
5.本技术的目的是提供一种薄膜表面缺陷检测系统及方法,从而解决现有技术中钙钛矿薄膜质量评估采用微观实验仪器设备无法满足批量化生产需求的问题,同时能够实现对缺陷的分类。
6.为实现上述目的,本技术提供了一种薄膜表面缺陷检测系统,其特征在于,包括:检测子系统和数据处理服务器;
7.所述检测子系统,包括多个工业相机、多个频率的光源和信号处理平台;所述信号处理平台,用于向多个所述工业相机和多个频率的所述光源发送同步控制信号;多个所述工业相机和多个频率的所述光源,用于当接收到所述同步控制信号时,多个频率的所述光
源配合多个所述工业相机,由多个所述工业相机通过多通道采集待测样品的图像,并将所述待测样品的图像发送到所述数据处理服务器;
8.所述数据处理服务器,用于根据接收到的所述待测样品的图像,进行缺陷的真假判断及具体缺陷分类。
9.可选的,多个所述工业相机,包括:
10.黑白高速线阵相机,用于采集所述待测样品的黑白通道图像;
11.彩色高速线阵相机,用于采集所述待测样品的彩色通道图像。
12.可选的,多个频率的所述光源,包括:
13.第1反射场线光源、第2反射场线光源、第1透射场线光源和第2透射场线光源,用于配合所述黑白高速线阵相机,由所述黑白高速线阵相机采集待测样品的透射亮通道图像、透射暗通道图像、反射亮通道图像和反射暗通道图像。
14.第2透射场线光源,用于配合所述彩色高速线阵相机,由所述彩色高速线阵相机采集待测样品的彩色通道图像。
15.可选的,所述黑白高速线阵相机与钙钛矿电池输送辊道平面夹角范围为75
°
至83
°
,且包含两端的值;所述黑白高速线阵相机扫描线方向平行于所述钙钛矿电池输送辊道轴线;
16.所述第1透射场线光源相对于所述钙钛矿电池输送辊道平面位于所述黑白高速线阵相机的对侧,且保证所述黑白高速线阵相机扫描线平面与所述第1透射场线光源出射平行光线平面重合;
17.所述第1反射场线光源位于所述黑白高速线阵相机的同侧,且与所述黑白高速线阵相机组成轴对称,对称轴为过所述黑白高速线阵相机扫描线平面与所述钙钛矿电池输送辊道平面的交线且垂直于所述钙钛矿电池输送辊道平面的平面;
18.所述第2反射场线光源位于所述黑白高速线阵相机组的同侧,所述第2反射场线光源出射平行光线平面穿过所述交线,且与所述钙钛矿电池输送辊道平面夹角范围为10
°
至30
°
,且包含两端的值。
19.可选的,所述彩色高速线阵相机垂直于所述钙钛矿电池输送辊道平面;
20.所述第2透射场线光源相对于所述钙钛矿电池输送辊道平面位于所述彩色高速线阵相机的对侧,且保证所述彩色高速线阵相机扫描线平面与所述第2透射场线光源出射平行光线平面重合。
21.可选的,所述检测子系统,还包括:
22.前置图像处理平台,用于将所述信号处理平台发出的所述同步控制信号发送到所述黑白高速线阵相机和所述彩色高速线阵相机;对所述待测样品的黑白通道图像和所述待测样品的彩色通道图像进行预处理,并将经过预处理后的待测样品的多通道图像发送到所述数据处理服务器。
23.可选的,所述前置图像处理平台,包括:
24.与所述彩色高速线阵相机对应的前置图像处理平台,用于将所述彩色通道图像从rgb颜色空间转换到lab空间的算子;基于所述lab空间,计算相对标准样本色差;根据预设相对标准样本色差阈值,得到缺陷区域图像;
25.与所述黑白高速线阵相机对应的前置图像处理平台,用于对所述黑白通道图像进
microscope,sem)、原子力显微镜(atomic force microscope,afm)、台阶仪测试薄膜微观特征;光谱检测,如荧光光谱等;基于人肉眼进行检测和判断。xrd利用x射线在晶体中的衍射现象来获得衍射后x射线信号特征,经过信号处理得到衍射图谱。利用谱图信息不仅可以实现常规显微镜的确定物相,并拥有“透视眼”来看晶体内部是否存在缺陷(位错)和晶格缺陷等。钙钛矿薄膜微观上是一种正八面体晶体,因为可以由xrd来检测结晶状态。sem利用聚焦的很窄的高能电子束来扫描样品,通过光束与物质间的相互作用,来激发各种物理信息,对这些信息收集、放大、再成像以达到对物质微观形貌表征的目的。afm利用微悬臂感受和放大悬臂上尖细探针与受测样品原子之间的作用力,从而达到检测的目的,具有原子级的分辨率。台阶仪原理跟原子力显微镜类似,用来测量薄膜厚度。以上几种科学仪器都可以用来对钙钛矿表面微观形态进行精确度量和评估。然而上述的科学仪器设备,价格昂贵,且检测时间长,检测过程复杂,只适合对样品进行评估试验,无法用于钙钛矿电池批量化生产的在线检测。
43.另外一种基于机器视觉对钙钛矿薄膜质量进行检测的方法,存在以下缺点:a)所述方案的图像采集单元采用面阵工业相机,视场区域有限,且需要钙钛矿薄膜电池处于静止状态拍摄,会影响生产线节拍,这种方式只能对小面积样品进行图像采集检测,无法满足大面积(比如1000mm x 1200mm)和高速输送的钙钛矿电池检测需求;b)钙钛矿薄膜由于成膜工艺及配方的不同,会产生结晶程度不均缺陷,膜层厚度不均缺陷,基体覆盖率失效评估,膜内缺陷如针眼、豹纹、划痕等,同时玻璃基材也有一定概率上含有气泡、结石、划伤等基材缺陷,这些对薄膜功能、性能都会产生影响。而所述的方案单纯从颜色上与样本颜色比对来评估结晶程度,进而对钙钛矿薄膜质量进行评估,有些片面;c)所述的光源为单场复合光,只能得到一个通道的图像,因而无法有效获取b)所述的各种类型缺陷表征,同时该方案完成依靠传统的机器视觉算法不能很好的实现对钙钛矿薄膜缺陷检出及有效分类,进而对钙钛矿电池质量进行预估。因此,本技术了提供了一种薄膜表面缺陷检测系统及方法,从而解决现有技术中钙钛矿薄膜质量评估采用微观实验仪器设备无法满足批量化生产需求的问题,同时能够实现对缺陷的分类。
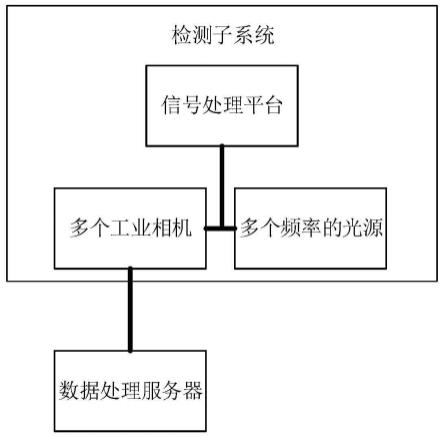
44.请参考图1,图1为本技术实施例提供的一种薄膜表面缺陷检测系统的结构框图,该系统可以包括:检测子系统和数据处理服务器;
45.所述检测子系统,包括多个工业相机、多个频率的光源和信号处理平台;所述信号处理平台,用于向多个所述工业相机和多个频率的所述光源发送同步控制信号;多个所述工业相机和多个频率的所述光源,用于当接收到所述同步控制信号时,多个频率的所述光源配合多个所述工业相机,由多个所述工业相机通过多通道采集待测样品的图像,并将所述待测样品的图像发送到所述数据处理服务器;
46.所述数据处理服务器,用于根据接收到的所述待测样品的图像,进行缺陷的真假判断及具体缺陷分类。
47.本实施例并不限定工业相机的颜色是否相同,例如可以是相同颜色的工业相机,如可以均为黑白相机;也可以是不同颜色的工业相机,如可以包括黑白相机和彩色相机。需要说明的是,当多个工业相机为相同颜色的工业相机时,获得的待测样品的多通道图像,包括采集的多个频率的光源下的待测样品的图像;当多个工业相机为不同颜色的工业相机时,获得的待测样品的多通道图像包括:不同颜色的工业相机采集的待测样品的图像和采
集的多个频率的光源下的待测样品的图像。本实施例并不限定工业相机的具体种类,例如可以是面阵工业相机;也可以是线阵工业相机。考虑到线阵工业相机的视场区域比面阵工业相机大,为了保证大面积图像数据采集,因此本实例可以采用线阵工业相机。本实例并不限定光源的具体种类,只要保证光源配合工业相机能够成像即可。本实例中可以采用线光源。本实例并不限定工业相机的扫描频率,只要能够保证与钙钛矿电池在输送辊道上的传输速度保持同步即可。考虑到高速工业相机可以拍摄高速运动的物体,为了保证相机的扫描精度,本实施例可以采用高速工业相机,同时根据辊道、钙钛矿电池宽度和相机的视场区域计算相机的扫描频率,对高速工业相机的扫描频率进行调整。本实施例并不限定工业相机与光源之间的具体光路拓扑结构,只要保证光源配合工业相机能够成像即可。
48.需要说明的是,信号处理平台输出的同步控制信号用于控制光源的频闪周期、亮度(控制脉冲宽度调制占空比)、频闪顺序;同样该同步控制信号控制输出到前置图像处理平台,由前置图像处理平台产生对应的同步控制信号到工业相机,完成外同步模式的图像数据采集。本实例并不限定同步控制信号的具体类型,只要能同步工业相机与光源的触发动作即可。本实施例中同步控制信号可以为差分脉冲信号。为了得到缺陷的多场的多维度信息,本实施例可以采用高频同步控制信号对光源和相机进行脉冲同步控制,基于时分复用的方式得到缺陷的多场的多维度信息。需要说明的是,当同步信号频率足够快时,可以基于时分复用的方式,得到同一扫描位置多场图像;信号处理平台同时发送同步控制信号到各组线光源,控制各组线光源高频闪亮,达到时分复用各组线光源通道的目的。
49.进一步的,为了保证图像采集数据的多维度,本实例中多个所述工业相机,可以包括:黑白高速线阵相机,用于采集所述待测样品的黑白通道图像;彩色高速线阵相机,用于采集所述待测样品的彩色通道图像。进一步的,本实例中多个频率的所述光源,可以包括:第1反射场线光源、第2反射场线光源、第1透射场线光源和第2透射场线光源,用于配合所述黑白高速线阵相机,由所述黑白高速线阵相机采集待测样品的透射亮通道图像、透射暗通道图像、反射亮通道图像和反射暗通道图像。第2透射场线光源,用于配合所述彩色高速线阵相机,由所述彩色高速线阵相机采集待测样品的彩色通道图像。需要说明是,第1透射场线光源可形成透射亮场和透射合成暗场,可以用于检测玻璃基材本身缺陷:遮光类缺陷(比如结石、夹杂物等)和折光类缺陷(比如气泡);针对膜内透光缺陷(比如膜面针孔、膜面划痕等);第1和第2反射场线光源可形成反射亮场和反射合成暗场,可以用于检测玻璃基材本身缺陷:划伤、开口泡等,针对反光类缺陷(比如开口泡、膜面斑状缺陷等);第2透射场线光源形成彩色图像,可以用于薄膜结晶程度缺陷评估。进一步的,由于增加工业相机的数量,也可以增大扫描面积,为了保证大面积图像数据采集,本实例中可以根据钙钛矿电池宽度确定黑白高速线阵相机的数量。需要说明的是,本实施例中包括多个工业相机,为了标识发送到对应的前置图像处理平台及连接的高速线阵相机,信号处理平台可以向相应前置图像处理平台发送一组特定的脉冲序列,即识别信号。
50.进一步的,为了保证光源配合工业相机能够成像,本实例中光路拓扑结构可以为:所述黑白高速线阵相机与钙钛矿电池输送辊道平面夹角范围为75
°
至83
°
,且包含两端的值;所述黑白高速线阵相机扫描线方向平行于所述钙钛矿电池输送辊道轴线;所述第1透射场线光源相对于所述钙钛矿电池输送辊道平面位于所述黑白高速线阵相机的对侧,且保证所述黑白高速线阵相机扫描线平面与所述第1透射场线光源出射平行光线平面重合;所述
第1反射场线光源位于所述黑白高速线阵相机的同侧,且与所述黑白高速线阵相机组成轴对称,对称轴为过所述黑白高速线阵相机扫描线平面与所述钙钛矿电池输送辊道平面的交线且垂直于所述钙钛矿电池输送辊道平面的平面;所述第2反射场线光源位于所述黑白高速线阵相机组的同侧,所述第2反射场线光源出射平行光线平面穿过所述交线,且与所述钙钛矿电池输送辊道平面夹角范围为10
°
至30
°
,且包含两端的值。进一步的,本实例中光路拓扑结构可以为:所述彩色高速线阵相机垂直于所述钙钛矿电池输送辊道平面;所述第2透射场线光源相对于所述钙钛矿电池输送辊道平面位于所述彩色高速线阵相机的对侧,且保证所述彩色高速线阵相机扫描线平面与所述第2透射场线光源出射平行光线平面重合。
51.进一步的,为了提高缺陷分类的准确度,对采集到的待测样品的图像先进行预处理,本实例中所述检测子系统,还可以包括:前置图像处理平台,用于将所述信号处理平台发出的所述同步控制信号发送到所述黑白高速线阵相机和所述彩色高速线阵相机;对所述待测样品的黑白通道图像和所述待测样品的彩色通道图像进行预处理,并将经过预处理后的待测样品的多通道图像发送到所述数据处理服务器。本实例并不限定对图像进行预处理的具体方式,可以根据不同种类的图像采用相应的处理方式。本实例中所述前置图像处理平台,可以包括:与所述彩色高速线阵相机对应的前置图像处理平台,用于将所述彩色通道图像从rgb(red green blue,红绿蓝)颜色空间转换到lab空间的算子;基于所述lab空间,计算相对标准样本色差;根据预设相对标准样本色差阈值,得到缺陷区域图像;与所述黑白高速线阵相机对应的前置图像处理平台,用于对所述黑白通道图像进行预处理计算并进行blob联通计算;根据预设联通阈值,得到含有缺陷的blob区域图像。本实例并不限定前置图像处理平台的具体类型,例如前置图像处理平台可以为包含fpga(field programmable gate array,现场可编程逻辑门阵列)芯片的嵌入式处理平台,用于对所述预处理进行加速。本实例采用为包含fpga芯片的嵌入式处理平台,通过对图像处理算子并行加速计算,有利于减轻数据处理服务器压力,保证实时检测需求。本实施例并不限定工业相机与前置图像处理平台的具体连接方式,例如可以是cameralink full(摄像头连接接口);也可以是10g ethernet(以太网)。本实施例并不限定前置图像处理平台与数据处理服务器的具体连接方式,例如可以是检测子系统可以包括千兆网络交换机,用于所述前置图像处理平台通过千兆ethernet将经过预处理后的待测样品的多通道图像发送到所述数据处理服务器。
52.进一步的,为了提高缺陷分类的准确度,本实例中所述数据处理服务器,用于对所述缺陷区域图像和所述含有缺陷的blob区域图像进行同一缺陷有效归并;将同一缺陷的多通道的图像输入到预先训练好的深度学习神经网络;所述深度学习神经网络对所述同一缺陷的多通道的图像进行计算;根据网络模型计算后的结构进行缺陷的真假判断及具体缺陷分类。本实例并不限定深度学习神经网络的具体类型,例如可以是ccn(convolutionalneuralnetworks,卷积神经网络)。进一步的,为了方便客户查看数据处理服务器的处理结果,本实施例中数据处理服务器还可以与客户端连接,用于将根据网络模型计算后的结构进行缺陷的真假判断及具体缺陷分类的结果发送到客户端。
53.进一步的,为了实现对检测子系统的在线控制,本实例中薄膜表面缺陷检测系统还可以包括外部子系统,用于向信号处理平台发送线控信号,由信号处理平台将线控信号发送到前置图像处理平台。其中,线控信号可以包括编码信号:差分脉冲信号,由信号处理平台接收外部子系统的脉冲编码器信号,经过其内部fpga进行滤波并倍频处理后发送至各
前置图像处理平台;光电开关io:该io为可选项,由信号处理平台接收外部子系统的光电开关信号,滤波处理后转发到各前置图像处理平台。
54.进一步的,为了可以有效增强系统的稳定性能,本实例中薄膜表面缺陷检测系统还可以包括由工业冷水机、系列水冷管道及热交换器组成的水冷系统。
55.基于上述实施例,本技术通过采用多个频率的光源与多个工业相机同频同步工作,统一由信号处理平台给出同步控制信号,最终得到多通道的薄膜表面图像,有利于缺陷的检出及缺陷具体的分类,具有多维度、在线实时、快速、高效、高性价比等优点,解决了目前钙钛矿薄膜质量评估采用微观实验仪器设备无法满足批量化生产需求的问题,同时能够实现对缺陷的分类。
56.下面结合具体的实例说明上述薄膜表面缺陷检测系统,请参考图2,图2为本技术实施例提供的一种薄膜表面缺陷检测系统的示意图,该系统具体包括:检测子系统、处理服务子系统、外部子系统、冷却子系统组成。其中检测子系统由黑白高速线阵相机组、彩色高速线阵相机、相应的前置图像处理平台、信号处理平台、千兆网络交换机、线光源组等组成;处理服务子系统由数据处理服务器和客户端组成。其中,采用8kpixels黑白高速线阵相机,设定待检测钙钛矿电池宽度为1000mm,由三个线阵相机分管,考虑各相机重叠区域及电池板摆幅度,单相机有效视场区域取400mm,则计算单相机理论精度为:400/8192=0.0488mm/pixel。取钙钛矿电池运行方向与相机扫描方向均为该精度,辊道速度按照30m/min,则黑白高速线阵相机扫描频率需取:30x1000/60/0.0488=10246hz。
57.请参考图3,图3为黑白高速线阵相机组和彩色高速线阵相机与线光源组的光路拓扑图:
58.黑白高速线阵相机组与钙钛矿电池输送辊道平面夹角在75
°
至83
°
范围(包含两端的值)内取值;黑白高速线阵相机组扫描线方向平行于钙钛矿电池输送辊道轴线;
59.透射场线光源-i相对于钙钛矿电池输送辊道平面位于黑白高速线阵相机组的对侧,且保证黑白高速线阵相机组扫描线平面与透射场线光源-i出射平行光线平面重合;
60.反射场线光源-i位于黑白高速线阵相机组的同侧,且与黑白高速线阵相机组组成轴对称,对称轴为过黑白高速线阵相机组扫描线平面与钙钛矿电池输送辊道平面的交线且垂直于钙钛矿电池输送辊道平面的平面;
61.所述反射场线光源-ii位于黑白高速线阵相机组的同侧,反射场线光源-ii出射平行光线平面穿过所述交线,且与钙钛矿电池输送辊道平面夹角在10
°
至30
°
范围(包含两端的值)内取值。
62.彩色高速线阵相机垂直于钙钛矿电池输送辊道平面;透射场线光源-ii相对于钙钛矿电池输送辊道平面位于彩色高速线阵相机组的对侧,且保证彩色高速线阵相机扫描线平面与透射场线光源-ii出射平行光线平面重合。
63.请参考图4,图4为系统算法处理的主流程,包含:
64.彩色高速线阵相机组对应的前置图像处理平台的算法处理流程如下:
65.(1)rgb颜色空间不能直接转换为lab颜色空间,需要借助xyz颜色空间,把rgb颜色空间转换到xyz颜色空间,之后再把xyz颜色空间转换到lab颜色空间。
66.rgb转化到xyz:
[0067][0068]
其中,x色度坐标表示红原色的比例,y色度坐标表示绿原色的比例,z色度坐标表示蓝原色的比例;r表示红原色,g表示绿原色,b表示蓝原色。
[0069]
再将xyz转化到cie(international commission on illumination,国际照明委员会)l*a*b*:
[0070][0071]
其中,l*表示亮度,a*表示从洋红色至绿色的范围,b*表示从黄色至蓝色的范围,下标0表示对应的参考白色,可认为是cie标准d65照明条件下的完全漫反射白色。
[0072]
上式中:
[0073][0074]
其中,t表示x/x0或y/y0或z/z0,为当前红、绿、蓝当量相对参考白色红、绿、蓝当量比值。
[0075]
检测值与薄膜样本颜色色差δe可以表征薄膜结晶程度,δe为l*a*b*颜色空间欧几里得距离,计算公式如下:
[0076][0077]
其中,l1*表示当前试件薄膜图像亮度,a1*表示当前试件薄膜图像从绿色到红色的分量,b1*表示当前试件薄膜图像从蓝色到黄色的分量;l2*表示参考样本图像亮度,a2*表示参考样本从绿色到红色的分量,b2*表示参考样本从蓝色到黄色的分量。对于彩色通道检出的色差缺陷,根据现场钙钛矿薄膜工艺要求设置偏差阈值,对δe超出阈值的区域做区域联通,得到对应缺陷区域图像。
[0078]
黑白高速线阵相机组对应的前置图像处理平台的算法处理流程如下:
[0079]
黑白高速线阵相机组对应的前置图像处理平台,基于fpga并行对多场图像进行图像预处理,包括平均值滤波、高斯滤波、中值滤波等滤波算子计算,并且根据实际图像可选择进行平场校正,各场图像差分二值化后进行邻域的blob联通计算,根据设定的联通阈值,从而得到含有缺陷的blob区域图像。
[0080]
数据处理服务器算法处理流程如下:
[0081]
对各高速线阵相机通过千兆网络发送的缺陷区域图像及含有缺陷的blob区域图像进行接收,根据全局编码及标定参数,得到缺陷的全局坐标,依据该全局坐标值对各缺陷进行合并,保证不同相机检测到的同一缺陷有效归并。同一缺陷的多场图像输入到已经训练好的深度学习框架接口,神经网络输入层为多通道的图像输入(包括透射亮、透射暗、反
射亮、反射暗共4个通道图片),非传统意义上的单通道黑白图像输入或rgb三通道的彩色图像输入。其中,采用的神经网络为cnn,基于resnet(residual network,残差网络)模型训练。系统根据网络模型运算后的结构进行缺陷的真假判断及具体缺陷分类。
[0082]
请参考图5,图5为检测的典型缺陷图像,依次为针眼缺陷图像、划痕及厚度不均缺陷图像和膜面斑状缺陷图像。
[0083]
下面对本技术实施例提供的一种薄膜表面缺陷检测方法进行介绍,下文描述的薄膜表面缺陷检测方法与上文描述的薄膜表面缺陷检测系统可相互对应参照。
[0084]
请参考图6,图6为本技术实施例提供的一种薄膜表面缺陷检测方法的流程图,该方法可以包括:
[0085]
s101:向多个工业相机和多个频率的光源发送同步控制信号,以当接收到所述同步控制信号时使多个频率的所述光源配合多个所述工业相机,由多个所述工业相机通过多通道采集待测样品的图像,并将所述待测样品的图像发送到所述数据处理服务器;检测子系统,包括多个所述工业相机、多个频率的所述光源和所述信号处理平台;
[0086]
s102:根据接收到的所述待测样品的图像,进行缺陷的真假判断及具体缺陷分类。
[0087]
基于上述实施例,本技术通过采用多个频率的光源与多个工业相机同频同步工作,统一由信号处理平台给出同步控制信号,最终得到多通道的薄膜表面图像,有利于缺陷的检出及缺陷具体的分类,具有多维度、在线实时、快速、高效、高性价比等优点,解决了目前钙钛矿薄膜质量评估采用微观实验仪器设备无法满足批量化生产需求的问题,同时能够实现对缺陷的分类。
[0088]
本文中应用了具体个例对本技术的原理及实施方式进行了阐述,且各个实施例间为递进关系,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的方法而言,可参见对应的系统部分说明。以上实施例的说明只是用于帮助理解本技术的方法及其核心思想。对于本技术领域的普通技术人员来说,在不脱离本技术原理的前提下,还可以对本技术进行若干改进和修饰,这些改进和修饰也落入本技术权利要求的保护范围内。
[0089]
还需要说明的是,在本说明书中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其它变体意在涵盖非排他性的包含,从而使得包括一系列要素的系统或是方法不仅包括那些要素,而且还包括没有明确列出的其它要素,或者是还包括为这种系统或是方法所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括要素的系统或是方法中还存在另外的相同要素。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1