一种基于载机姿态的SAR成像效果实时评估方法与流程
一种基于载机姿态的sar成像效果实时评估方法
技术领域
1.本发明属于机载雷达技术领域,具体涉及一种基于载机姿态的sar成像效果实时评估方法。
背景技术:
2.机载雷达对地功能中,通常具备多种对地成像方式,如大区域、低分辨率的真波束地图测绘(rbm)方式,小区域、高分辨率的合成孔径成像(sar)方式。由于sar成像方式具有小区域、高分辨率的特点,因此在无目标坐标作为引导的使用场景中,需从rbm等大区域、低分辨率的方式中进行坐标引导后进入。
3.在使用场景中,通常通过rbm方式对地形进行大范围成像,之后对指定区域进行高分辨率sar成像。由于载机飞行高度、地面高度、斜视角度、成像距离等因素影响,带来波束擦地角变化,从而引起sar成像效果变化。雷达操作员在进行雷达操作时,若无准确指引,无法在雷达sar成像前对该区域成像效果进行评估。
技术实现要素:
4.有鉴于此,本发明提供一种基于载机姿态的sar成像效果实时评估方法,针对雷达实际使用中的需求,在rbm成像时通过计算擦地角实时评估sar成像效果,并根据成像效果进行区域划分显示,辅助操作员获得高质量sar成像。
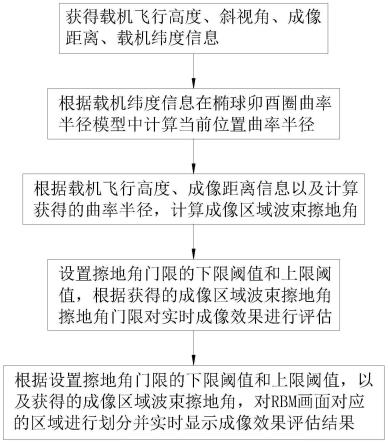
5.一种基于载机姿态的sar成像效果实时评估方法,包括如下步骤:
6.步骤1、获得载机飞行高度、斜视角、成像距离、载机纬度信息;
7.步骤2、根据载机纬度信息,在椭球卯酉圈曲率半径模型中计算当前位置曲率半径;
8.步骤3、根据载机飞行高度、成像距离信息以及计算获得的曲率半径,计算成像区域波束擦地角;
9.步骤4、设置擦地角门限的下限阈值和上限阈值,根据获得的成像区域波束擦地角擦地角门限对实时成像效果进行评估。
10.进一步地,实时成像效果进行评估依据为:成像区域波束擦地角小于等于下限阈值,则判断为成像效果判断为不佳;成像区域波束擦地角在下限阈值和上限阈值区间内,则判断为成像效果良好;成像区域波束擦地角大于上限阈值,则判断为无法成像。
11.进一步地,在椭球卯酉圈曲率半径模型中,地球曲率半径
[0012][0013]
其中,re为载机位置地球曲率半径,lat为载机所在位置纬度值,a为地球长轴半径,e2为第一偏心率。
[0014]
进一步地,步骤3中根据载机飞行高度、成像距离信息以及计算获得的曲率半径re,计算成像区域波束擦地角θ
el
为:
[0015]
θ
el
=π/2-arccos(((re+h)2+l
2-re2)/(2*(re+h)*l))
[0016]
其中,h为载机飞行高度、l为成像距离。
[0017]
进一步地,以载机上雷达收发装置为参考点,建立雷达扫描区域rbm画面,并根据设置擦地角门限的下限阈值和上限阈值,以及获得的成像区域波束擦地角,对rbm画面对应的区域进行划分并实时显示成像效果评估结果。
[0018]
进一步地,通过计算擦地角门限的下限阈值θ
el1
和上限阈值θ
el2
对应的成像距离l1和l2,
[0019][0020][0021]
根据距离l1和l2和sar成像斜视角度限制进行区域划分,并对rbm画面对应的区域进行划分并实时显示成像效果评估结果。
[0022]
与现有技术相比,本发明的有益效果至少包括:本发明针对雷达实际使用中的需求,通过计算擦地角实时评估sar成像效果,清晰直观的辅助操作员选择合适的飞行姿态进行sar成像,以获得高质量sar成像。规避了操作员在雷达rbm方式中选取目标区域后,由于飞行高度、地面高度、斜视角度、成像距离等因素带来擦地角变化,无法保证对该区域进行高分辨率sar成像效果的问题。
附图说明
[0023]
为了更清楚地说明本技术实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
[0024]
图1为实施例1或2中基于载机姿态的sar成像效果实时评估方法流程图;
[0025]
图2为实施例2中rbm画面对应的区域划分示意图;
[0026]
图3为实施例2中波束擦地角示意图。
具体实施方式
[0027]
下面结合附图对本技术实施例进行详细描述。
[0028]
以下通过特定的具体实例说明本技术的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本技术的其他优点与功效。显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。本技术还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本技术的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
[0029]
实施例1
[0030]
参见图1,一种基于载机姿态的sar成像效果实时评估方法,包括如下步骤:
[0031]
步骤1、获得载机飞行高度、斜视角、成像距离、载机纬度信息;
[0032]
步骤2、根据载机纬度信息,在椭球卯酉圈曲率半径模型中计算当前位置曲率半径;
[0033]
步骤3、根据载机飞行高度、成像距离信息以及计算获得的曲率半径,计算成像区域波束擦地角;
[0034]
步骤4、设置擦地角门限的下限阈值和上限阈值,根据获得的成像区域波束擦地角擦地角门限对实时成像效果进行评估。
[0035]
在本实施例中,针对雷达实际使用中的需求,通过计算擦地角实时评估sar成像效果,清晰直观的辅助操作员选择合适的飞行姿态进行sar成像,以获得高质量sar成像。规避了操作员在雷达rbm方式中选取目标区域后,由于飞行高度、地面高度、斜视角度、成像距离等因素带来擦地角变化,无法保证对该区域进行高分辨率sar成像效果的问题。
[0036]
本实施例中可以以载机上雷达收发装置为参考点,建立雷达扫描区域rbm画面,并根据设置擦地角门限的下限阈值和上限阈值,以及获得的成像区域波束擦地角,对rbm画面对应的区域进行划分并实时显示成像效果评估结果,便于操作员观察成像评估效果,以便选择合适的飞行姿态进行sar成像。实时成像效果进行评估依据为:成像区域波束擦地角小于等于下限阈值,则判断为成像效果判断为不佳;成像区域波束擦地角在下限阈值和上限阈值区间内,则判断为成像效果良好;成像区域波束擦地角大于上限阈值,则判断为无法成像。
[0037]
实施例2
[0038]
参见图1-图3,一种基于载机姿态的sar成像效果实时评估方法,包括如下步骤:
[0039]
1)获得载机飞行高度h、成像距离l、载机纬度lat信息;
[0040]
2)在椭球卯酉圈曲率半径模型中,获取地球曲率半径re;
[0041][0042]
其中,re为载机位置地球曲率半径;lat为载机所在位置纬度值;a为地球长轴半径;e2为第一偏心率。本实施例中取a=6378137,e2=0.006694379995。
[0043]
3)波束擦地角示意图如图3所示,根据相关参数,计算擦地角θ
el
;
[0044]
θ
el
=π/2-arccos(((re+h)2+l
2-re2)/(2*(re+h)*l))
[0045]
4)选取擦地角门限下限阈值θ
el1
和上限阈值θ
el2
,θ
el
在0~θ
el1
范围内则判断为成像效果不佳,θ
el
在θ
el1
~θ
el2
之间,则判断为成像效果良好,θ
el
>θ
el2
则判断为无法成像。本实施例中选取θ
el1
为5
°
,θ
el2
为40
°
。
[0046]
5)根据下式计算擦地角θ
el1
和θ
el2
对应的成像距离l1和l2;
[0047][0048][0049]
6)根据距离l1和l2和sar成像斜视角度限制进行区域划分,并在rbm画面对应的区域实时显示成像效果评估结果。如图2所示,方位角
±
θ角度范围为sar成像斜视角度限制,l1、l2为根据擦地角门限计算所得距离。
[0050]
以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1