一种激光测距方法、系统、激光雷达及雷达制品与流程
本发明涉及激光雷达,更具体地说,涉及一种激光测距方法、系统、激光雷达及雷达制品。
背景技术:
1、dtof是direct time of flight的简写,直译为直接飞行时间的意思,通过给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行(往返)时间来得到目标物距离。距离d=c*t/2,c是光的速度,3*108米每秒,t是发出到接收到的时间间隔;
2、目前dtof测距方法一般有两种方法,一种是使用单个apd或者pd管作为接收器件,每次发射产生一次测距时间,第二种是使用spad阵列,由于spad可以使用cmos工艺制造,可以与tdc后端处理电路集成,是目前低成本dtof的主流方案;但是由于spad阵列非常敏感,其会使用多次发射激光,接收多次测距数据后产生直方图,通过直方图寻峰来找到测距时间,需要芯片上开大面积的ram资源用于直方图存储,又由于tdc精度和寻峰误差的原因,使得目前使用的dtof方案在近距离测距时精度会较差同时成本会较高,需要一种能够改善该问题的激光测距方式方法。
技术实现思路
1、本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种激光测距方法、系统、激光雷达及雷达制品。
2、本发明解决其技术问题所采用的技术方案是:
3、构造一种一种激光测距方法,其中,包括以下步骤:
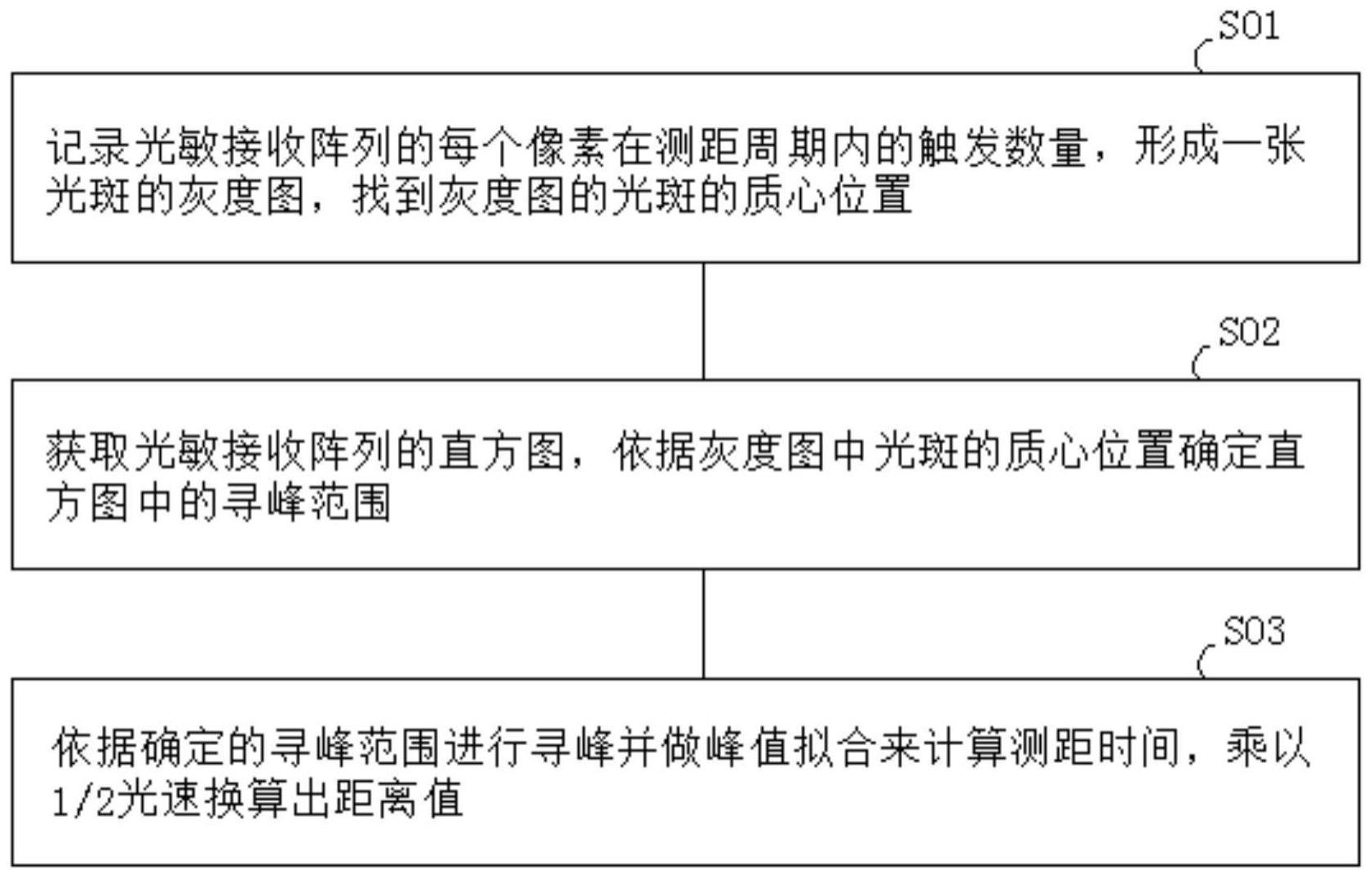
4、记录光敏接收阵列的每个像素在测距周期内的触发数量,形成一张光斑的灰度图,找到灰度图的光斑的质心位置;
5、获取光敏接收阵列的直方图,依据灰度图中光斑的质心位置确定直方图中的寻峰范围;
6、依据确定的寻峰范围进行寻峰并做峰值拟合来计算测距时间,乘以1/2光速换算出距离值。
7、本发明所述的激光测距方法,其中,所述记录光敏接收阵列的每个像素在测距周期内的触发数量,形成一张光斑的灰度图,找到灰度图的光斑的质心位置包括方法:
8、dtof模组的激光器向场景中发射脉冲波,spad或者其他光敏接收元件阵列从目标物体反射回来的脉冲波,其阵列上的单个单元会被概率触发,dtof会在单帧测量时间内发射和接收n次光信号,然后记录下n次飞行时间内每个单元被触发的次数,就可以形成一个连续的2维图像,其每个单元的值就是f(x,y),x表示的是该单元在阵列的x方向的位置,y表示的是该单元在阵列y方向的位置,使用这个2维图像,记图像中每一像素在x方向上坐标为:xi,对应的像素值加和为:pi,质心在x方向上坐标为:xo,则:
9、
10、将二维图像中每一像素在y方向上坐标为:yj,对应的像素值为:pi,质心在y方向上坐标为:yo,则:
11、
12、本发明所述的激光测距方法,其中,所述依据灰度图中光斑的质心位置确定直方图中的寻峰范围包括方法:
13、得到质心位置xo,yo后,可以与根据标定的检索表格确定直方图的寻峰范围;
14、检索表格可以标定,在激光雷达标定环节设置几个远近不同位置的标靶,将质心位置和距离范围进行标定,确认直方图寻峰范围,方便后续的dtof直方图寻峰算法计算。
15、本发明所述的激光测距方法,其中,所述光敏接收阵列为spad阵列、sipm阵列或apd阵列。
16、一种激光测距系统,其中,包括光敏接收阵列单元、数据处理单元和距离值计算单元;
17、所述光敏接收阵列单元,记录光敏接收阵列的每个像素在测距周期内的触发数量,形成一张光斑的灰度图,找到灰度图的光斑的质心位置;还用于生成光敏接收阵列的直方图;
18、所述数据处理单元,依据灰度图中光斑的质心位置确定直方图中的寻峰范围;
19、所述距离值计算单元,依据确定的寻峰范围进行寻峰并做峰值拟合来计算测距时间,乘以1/2光速换算出距离值。
20、本发明所述的激光测距系统,其中,所述光敏接收阵列单元记录光敏接收阵列的每个像素在测距周期内的触发数量,形成一张光斑的灰度图,找到灰度图的光斑的质心位置采用:
21、dtof模组的激光器向场景中发射脉冲波,spad或者其他光敏接收元件阵列从目标物体反射回来的脉冲波,其阵列上的单个单元会被概率触发,dtof会在单帧测量时间内发射和接收n次光信号,然后记录下n次飞行时间内每个单元被触发的次数,就可以形成一个连续的2维图像,其每个单元的值就是f(x,y),x表示的是该单元在阵列的x方向的位置,y表示的是该单元在阵列y方向的位置,使用这个2维图像,记图像中每一像素在x方向上坐标为:xi,对应的像素值加和为:pi,质心在x方向上坐标为:xo,则:
22、
23、将二维图像中每一像素在y方向上坐标为:yj,对应的像素值为:pi,质心在y方向上坐标为:yo,则:
24、
25、本发明所述的激光测距系统,其中,所述数据处理单元依据灰度图中光斑的质心位置确定直方图中的寻峰范围采用检索表格:
26、检索表格可以标定,在激光雷达标定环节设置几个远近不同位置的标靶,将质心位置和距离范围进行标定,确认直方图寻峰范围,方便后续的dtof直方图寻峰算法计算。
27、本发明所述的激光测距系统,其中,所述光敏接收阵列为spad阵列、sipm阵列或apd阵列。
28、一种激光雷达,其中,所述激光雷达上设置有如上述的激光测距系统。
29、一种雷达制品,其中,所述雷达制品上设置有如上述激光雷达。
30、本发明的有益效果在于:本发明使用光敏接收矩阵的光斑的灰度图,确定dtof测距的直方图的寻峰范围,减少内部资源消耗和寻峰的算力,降低系统成本的同时,过滤直方图上噪点峰值使得dtof方案的近距离精度更高,系统稳定性更好。
技术特征:
1.一种激光测距方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的激光测距方法,其特征在于,所述记录光敏接收阵列的每个像素在测距周期内的触发数量,形成一张光斑的灰度图,找到灰度图的光斑的质心位置包括方法:
3.根据权利要求2所述的激光测距方法,其特征在于,所述依据灰度图中光斑的质心位置确定直方图中的寻峰范围包括方法:
4.根据权利要求1所述的激光测距方法,其特征在于,所述光敏接收阵列为spad阵列、sipm阵列或apd阵列。
5.一种激光测距系统,其特征在于,包括光敏接收阵列单元、数据处理单元和距离值计算单元;
6.根据权利要求5所述的激光测距系统,其特征在于,所述光敏接收阵列单元记录光敏接收阵列的每个像素在测距周期内的触发数量,形成一张光斑的灰度图,找到灰度图的光斑的质心位置采用:
7.根据权利要求6所述的激光测距系统,其特征在于,所述数据处理单元依据灰度图中光斑的质心位置确定直方图中的寻峰范围采用:
8.根据权利要求5所述的激光测距系统,其特征在于,所述光敏接收阵列为spad阵列、sipm阵列或apd阵列。
9.一种激光雷达,其特征在于,所述激光雷达上设置有如权利要求5-8任一所述的激光测距系统。
10.一种雷达制品,其特征在于,所述雷达制品上设置有如权利要求9所述激光雷达。
技术总结
本发明涉及一种激光测距方法、系统、激光雷达及雷达制品,方法包括以下步骤:记录光敏接收阵列的每个像素在测距周期内的触发数量,形成一张光斑的灰度图,找到灰度图的光斑的质心位置;获取光敏接收阵列的直方图,依据灰度图中光斑的质心位置参考确定质心‑距离关系确定DTOF测距直方图中的寻峰范围;依据确定的寻峰范围进行寻峰来做峰值拟合计算出精确的测距时间,并换算出距离值;本发明使用光敏接收矩阵的光斑的灰度图,确定DTOF测距的直方图的寻峰范围,减少内部资源消耗和寻峰的算力,降低系统成本的同时,过滤直方图上噪点峰值使得DTOF方案的近距离精度更高,系统稳定性更好。
技术研发人员:王东宇
受保护的技术使用者:深圳市不止技术有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!