一种激光指引动态监测系统的制作方法
1.本发明涉及江河、湖泊救援技术领域,具体是指一种激光指引动态监测系统。
背景技术:
2.当人们意外落水,随时可能发生的危险。人员意外落水事故频繁发生,且意外发生的地点也在不断地为有效救援增加难度。
3.现代水上搜救中,如何快速发现落水人员并对人员实施有效的救援,提高水上人命搜救的成功率一直是被高度关注的问题。传统的基于船舶的搜救方式不仅反应速度慢,而且接近落水人员时也非常困难,往往只能采用间接施救的方式,影响救援时间,搜救效率低。
技术实现要素:
4.本发明要解决上述技术问题,提供一种解决江河、湖泊救援中落水人员快速定位的问题的激光指引动态监测系统。
5.为解决上述技术问题,本发明提供的技术方案为:
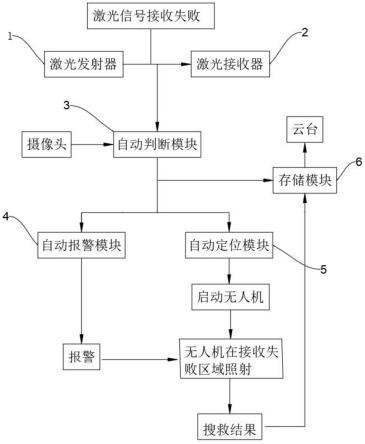
6.一种激光指引动态监测系统,包括激光发射器、激光接收器、自动判断模块、自动报警模块、存储模块和自动定位模块;
7.其中,所述的激光发射器为两点多组设置在河道的同向两端,两点多组所述的激光发射器的激光形成交叉覆盖河道,所述的激光接收器为配合激光发射器使用接收激光发射器的激光,所述的激光接收器接收不到激光发射器的激光时则触发自动判断模块;
8.其中,所述的自动判断模块判断激光接收器接收不到激光发射器的激光是否出现判断错误,所述的自动判断模块判断正确则启动自动定位模块和自动报警模块;
9.其中,所述的自动报警模块连接警方网络进行报警;
10.其中,所述的自动定位模块接收到两点多组的激光发射器的激光断开信号,启动无人机到达指定位置进行探照等待警方搜救人员。
11.优选地,同点的两个激光发射器之间的发射角度为10-15
°
。
12.优选地,所述的存储模块为保存数据和资料并上传云台。
13.优选地,所述的无人机飞行高度为50-80米,获取该区域正射图,作为本防控区域等额田字格区域划分图,快速的报出落实点具体位置,目标物产生位移的具体趋势和新的位置定位根据后续的激光发射器断开情况进行实时调整。
14.优选地,所述的激光发射器和水平面的高度为10-15cm。
15.优选地,所述的自动判断模块还包括摄像头,所述的摄像头的摄像信息可传输至自动判断模块内。
16.采用以上结构后,本发明具有如下优点:
17.本发明利用激光束中断的原理,可实现、自动报警模块和自动定位模块虚拟落水宽度和角度,从而通过测算,测算出虚拟位置,根据落水点位置,利用两条直线相交的原理,
为江面打捞和系留无人机照明作业,提供精准位置,可以精准解决,水面落水求助位置,江面事故救援作业位置,落水人员在区域内精准指引。提高救援效率和成功率。
18.上述概述仅仅是为了说明书的目的,并不意图以任何方式进行限制。除上述描述的示意性的方面、实施方式和特征之外,通过参考附图和以下的详细描述,本发明进一步的方面、实施方式和特征将会是容易明白的。
附图说明
19.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
20.图1是本发明的系统图。
21.图2是本发明激光发射器的激光射线图。
22.图3是本发明同点激光发射器的激光射线图。
23.图4是本发明无人机的等额田字格区域划分图。
24.如图所示:1、激光发射器;2、激光接收器;3、自动判断模块;4、自动报警模块;5、自动定位模块;6、存储模块。
具体实施方式
25.下面详细描述本技术的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本技术,而不能理解为对本技术的限制。
26.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
27.下面结合全文对本发明做进一步的详细说明。
28.结合附图1-4,一种激光指引动态监测系统,包括激光发射器1、激光接收器2、自动判断模块3、自动报警模块4、存储模块6和自动定位模块5;
29.其中,所述的激光发射器1为两点多组设置在河道的同向两端,两点多组所述的激光发射器1的激光形成交叉覆盖河道,所述的激光接收器2为配合激光发射器1使用接收激光发射器1的激光,所述的激光接收器2接收不到激光发射器1的激光时则触发自动判断模块3;激光发射器1可采用高速公路扫射型+翻墙自动报警,只要激光接收器2 接收不到激光发射器1的激光时则触发自动判断模块3,点对点信号中断,即可实现启动自动判断模块3模块,然后根据判断是否启动自动报警模块4和自动定位模块5。
30.其中,所述的自动判断模块3判断激光接收器2接收不到激光发射器1的激光是否出现判断错误,所述的自动判断模块3判断正确则启动自动定位模块5和自动报警模块 4;
31.其中,所述的自动报警模块4连接警方网络进行报警;
32.在具体实施的时候,激光接收器2接收不到激光发射器1的激光时则触发自动判断模块3,当人落水的时候,范围区域为一个点或者是一个点附近得多个点的激光接收器 2接收不到激光发射器1的激光,如是船只、海浪或者鸟类飞过,多个激光接收器2应该是组成一条路线或者是瞬间的断开在接收,船只、海浪或者鸟类飞过,造成的是多个激光接收器2接收不到激光发射器1的作用,其中多个激光接收器2断开点为一条路线,而非是人落水的一个点或者是一个点附近得多个点,在结合摄像头的视频进行判断。
33.其中,所述的自动定位模块5接收到两点多组的激光发射器1的激光断开信号,启动无人机到达指定位置进行探照等待警方搜救人员。
34.如图2和图3所示,同点的两个激光发射器1之间的发射角度为10-15
°
,通过多个固定激光发射器1,两个激光发射器1之间的发射角度为10-15
°
,如图3所示,图纸a点的夹角度为10-15
°
,勾勒出河面的场景,如图2所示。
35.所述的存储模块6为保存数据和资料并上传云台,在具体实施的时候,数据和资料为摄像头的拍摄视频和自动判断模块3的判断内容和最后的搜救结果,上传云台进行备份存储。
36.所述的无人机飞行高度为50-80米,获取该区域正射图,作为本防控区域等额田字格区域划分图,如图4所示,快速地报出落实点具体位置,目标物产生位移的具体趋势和新的位置定位根据后续的激光发射器1断开情况进行实时调整,在实际实施的时候,无人机飞行到所预定的区域,打开无人机的探照灯,探照灯向水面上照射,为搜救人员提供照明和定个位点的方向。
37.所述的激光发射器1和水平面的高度为10-15cm。
38.所述的自动判断模块3还包括摄像头,所述的摄像头的摄像信息可传输至自动判断模块3内。
39.该系统设备的激光发射器1和激光接收器2主要安装于固定旅游景点,长发性,高发性落水点,季节性涨潮点,解决公安、应急、海事等部门落水救捞、救助落实点定位问题。主要利用激光发射器1的高性能激光束性能,定点发射和激光接收器2的接受激光束,利用各个角度直射、斜射原理,在江面形成平面的立体图,形成基本的区域图。再利用无人机正面全向俯视图做透明比对,快速锁定落水人员落水位置。
40.该系统设备受天气影响较小,一般超过15公里的江河湖泊面,受激光束最大距离影响,可能会影响定位效果。
41.通过该系统设备,可以快速报告落水者在目标区域内的位置,为河面打捞人员、岸边下水实施救援人员提供精准坐标位置,为救援赢得时间和精准救援成功获取更大的作战价值和社会价值,该系统设备设有自动报警模块4,可以为重要桥梁设施、铁路桥、公路桥周边落水提供第一时间预警信息。
42.实施例一:
43.一种激光指引动态监测系统,包括激光发射器1、激光接收器2、自动判断模块3、自动报警模块4、存储模块6和自动定位模块5;所述的激光发射器1为两点多组设置在河道的同向两端,两点多组所述的激光发射器1的激光形成交叉覆盖河道,所述的激光接收器2为配合激光发射器1使用接收激光发射器1的激光,所述的激光接收器2接收不到激光发射器1的激光时则触发自动判断模块3;所述的激光发射器1和水平面的高度为10cm,所述的自动
判断模块3还包括摄像头,所述的摄像头的摄像信息可传输至自动判断模块3内,所述的自动判断模块3判断激光接收器2接收不到激光发射器1 的激光是否出现判断错误,所述的自动判断模块3判断正确则启动自动定位模块5和自动报警模块4;所述的自动报警模块4连接警方网络进行报警;所述的自动定位模块5 接收到两点多组的激光发射器1的激光断开信号,启动无人机到达指定位置进行探照等待警方搜救人员,同点的两个激光发射器1之间的发射角度为15
°
,所述的无人机飞行高度为50米,获取该区域正射图,作为本防控区域等额田字格区域划分图,快速的报出落实点具体位置,目标物产生位移的具体趋势和新的位置定位根据后续的激光发射器1断开情况进行实时调整,所述的自动判断模块3还包括摄像头,所述的摄像头的摄像信息可传输至自动判断模块3内。
44.当有人落水的时候,范围区域为一个点或者是一个点附近得多个点的激光接收器2 接收不到激光发射器1的激光,激光信号接收失败触发自动判断模块3,同时结合摄像头进行判断,启动自动报警模块4和自动定位模块5,自动定位模块5根据利用激光发射器1的高性能激光束性能,定点发射和激光接收器2的接受激光束,利用各个角度直射、斜射原理,在江面形成平面的立体图,形成基本的区域图。再利用无人机正面全向俯视图座透明比对,快速锁定落水人员落水位置,同时自动报警模块4连接警方网络进行报警,报警时可自动发生地址和时间等信息,派出搜救人员到达所在位置进行搜救,数据和资料为摄像头的拍摄视频和自动判断模块3的判断内容和最后的搜救结果,上传云台进行备份存储。
45.实施例二:
46.一种激光指引动态监测系统,包括激光发射器1、激光接收器2、自动判断模块3、自动报警模块4、存储模块6和自动定位模块5;所述的激光发射器1为两点多组设置在河道的同向两端,两点多组所述的激光发射器1的激光形成交叉覆盖河道,所述的激光接收器2为配合激光发射器1使用接收激光发射器1的激光,所述的激光接收器2接收不到激光发射器1的激光时则触发自动判断模块3;所述的激光发射器1和水平面的高度为10cm,所述的自动判断模块3还包括摄像头,所述的摄像头的摄像信息可传输至自动判断模块3内,所述的自动判断模块3判断激光接收器2接收不到激光发射器1 的激光是否出现判断错误,所述的自动判断模块3判断正确则启动自动定位模块5和自动报警模块4;所述的自动报警模块4连接警方网络进行报警;所述的自动定位模块5 接收到两点多组的激光发射器1的激光断开信号,启动无人机到达指定位置进行探照等待警方搜救人员,同点的两个激光发射器1之间的发射角度为10
°
,所述的无人机飞行高度为60米,获取该区域正射图,作为本防控区域等额田字格区域划分图,快速的报出落实点具体位置,目标物产生位移的具体趋势和新的位置定位根据后续的激光发射器1断开情况进行实时调整,所述的自动判断模块3还包括摄像头,所述的摄像头的摄像信息可传输至自动判断模块3内。
47.当不是有人落水的时候,是船只或者鸟类飞过的时候,造成的是多个激光接收器2 接收不到激光发射器1的作用,其中多个激光接收器2断开点为一条路线,而非是人落水的一个点或者是一个点附近得多个点,在结合摄像头的视频进行判断,不启动自动报警模块4和自动定位模块5,数据和资料上传云台进行备份存储。
48.以上对本发明及其实施方式进行了描述,这种描述没有限制性,全文中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相
似的结构方式及实施例,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1