一种建立室内绝对坐标系的方法和系统与流程
1.本发明涉及室内外定位技术领域,尤其涉及一种建立室内绝对坐标系的方法和系统。
背景技术:
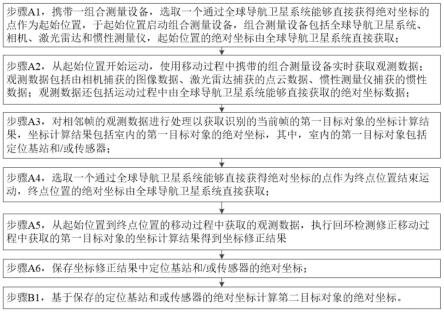
2.随着人类活动方式的丰富和移动效率的提升,室内外定位技术蓬勃发展,对位置信息的及时性、准确性、统一性提出要求。gnss定位、超声波定位、wifi定位、uwb定位、视觉定位等逐步走向多模式组合定位,室内外定位的无缝切换趋向一体化。目前,室外无遮挡区域可以使用gnss定位技术实现目标的绝对定位;对于室内场景,仅可获得物体与定位基站之间的相对坐标,特别是大型车站、商场、地下车库、工矿场所等存在将室内外坐标统一到绝对坐标系统的需要。同时,定位领域存在多个位置感知模块同时作业完成定位任务的场景,需要建立各传感器间准确的相对位置关系,将测量成果统一至绝对坐标系。例如,海洋测绘领域的多波束测绘,需要水下声学系统、水上gnss定位、姿态传感器等感知模块同步作业才可获得准确的水下地形地物绝对坐标。如图1a-1b所示,昂贵的精密姿态传感器基本上都会被安置在较为安全的船舶驾驶舱内平面几何中心位置,gnss设备将被安置在信号无遮挡的驾驶舱顶部,水下声学系统基本上会被安置在某侧船舷位置。通过测量分布在室内外不同地点的传感器位置,建立精确的相对位置关系,便于各传感器同步测量数据之间的换算,统一至gnss绝对坐标系统。
3.当前室内相对坐标系统一至室外绝对坐标系,采用全站仪等定位设备将室外参考点的绝对坐标基准引测至室内,通过全站仪测量赋予室内定位基站准确的绝对坐标。这种作业模式不仅需要在室外制作一定数量的绝对坐标参考点,在转角处、遮挡处等需要加测站,保证全站仪与室内定位基站之间的通视,作业效率较低。实际作业过程中,为快速获得相对位置关系,作业人员会选择拉皮尺或者激光测距仪直接测距,转角处直接采用直角水平或垂直转弯,直角也为作业人员大致估算,相对位置测量精度较低。
技术实现要素:
4.基于上述问题,本发明提供一种,旨在解决现有技术中室内定位精度低、效率低、测量繁琐等技术问题。
5.一种建立室内绝对坐标系的方法,包括预先获取室内的至少一个第一目标对象的绝对坐标以及获取第二目标对象的绝对坐标两个过程;
6.预先获取室内的第一目标对象的绝对坐标的过程包括如下步骤:
7.步骤a1,携带一组合测量设备,选取一个通过全球导航卫星系统能够直接获得绝对坐标的点作为起始位置,于起始位置启动组合测量设备,组合测量设备包括全球导航卫星系统、相机、激光雷达和惯性测量仪,起始位置的绝对坐标由全球导航卫星系统直接获取;
8.步骤a2,从起始位置开始运动,使用移动过程中携带的组合测量设备实时获取观
测数据;观测数据包括由相机捕获的图像数据、激光雷达捕获的点云数据、惯性测量仪捕获的惯性数据,观测数据还包括运动过程中由全球导航卫星系统能够直接获取的绝对坐标数据;
9.步骤a3,对相邻帧的观测数据进行处理以获取识别的当前帧的第一目标对象的坐标计算结果,坐标计算结果包括室内的第一目标对象的绝对坐标,其中,室内的第一目标对象包括定位基站和/或传感器;
10.步骤a4,选取一个通过全球导航卫星系统能够直接获得绝对坐标的点作为终点位置结束运动,终点位置的绝对坐标由全球导航卫星系统直接获取;
11.步骤a5,基于从起始位置到终点位置的移动过程中获取的观测数据,执行回环检测修正移动过程中获取的第一目标对象的坐标计算结果得到坐标修正结果;
12.步骤a6,保存坐标修正结果中定位基站和/或传感器的绝对坐标;
13.获取室内的第二目标对象的绝对坐标的步骤包括:
14.步骤b1,基于保存的定位基站和/或传感器的绝对坐标计算第二目标对象的绝对坐标。
15.进一步的,步骤a2包括:
16.步骤a21,对相邻帧的图像数据进行特征匹配获取匹配结果,以及对相邻帧的点云数据进行配准处理获取配准结果;
17.步骤a22,结合匹配结果、配准结果、当前帧的所述惯性数据以及前一帧第一目标对象的坐标计算结果获取识别的当前帧的第一目标对象的坐标计算结果。
18.进一步的,在步骤a22中包括经过滤波器优化后得到优化后的坐标计算结果。
19.进一步的,第一目标对象包括定位基站,第二目标对象为移动载体;
20.步骤b1,根据室内的定位基站的绝对坐标,基于前方交会原理计算移动载体的绝对坐标。
21.进一步的,室内包括至少4个定位基站。
22.进一步的,在步骤a3中,部分第一目标对象包括定位基站处设置的定位标靶,对相邻帧的观测数据进行处理以获取识别的定位标靶的坐标计算结果,进一步基于定位标靶的坐标计算结果处理得到相应的定位基站的绝对坐标。
23.一种建立室内绝对坐标系的系统,包括前述的一种建立室内绝对坐标系的方法,包括:
24.触发模块,用于在选择第一触发模式下启动系统,在选择第二触发模式下关闭系统;
25.能够携带的组合测量设备,连接触发模块,用于在启动后被携带着在移动过程中实时获取观测数据,当系统关闭时停止获取观测数据;
26.组合测量设备包括全球导航卫星系统、相机、激光雷达和惯性测量仪,观测数据包括由相机捕获的图像数据、激光雷达捕获的点云数据、惯性测量仪捕获的惯性数据,所述观测数据还包括运动过程中由全球导航卫星系统能够直接获取的绝对坐标数据;
27.其中,移动的起始位置和终点位置均选取全球导航卫星系统能够直接获得绝对坐标的点;全球导航卫星系统在启动时直接获取起始位置的绝对坐标,关闭时直接获取终点位置的坐标;
28.第一处理模块,连接组合测量设备,用于基于已知的绝对坐标数据,对相邻帧的观测数据进行处理以获取识别的当前帧的第一目标对象的坐标计算结果,坐标计算结果包括室内的第一目标对象的绝对坐标;
29.其中,第一目标对象包括定位基站和/或传感器;
30.第二处理模块,连接第一处理模块,用于基于从起始位置到终点位置的移动过程中获取的观测数据,执行回环检测修正移动过程中获取的第一目标对象的坐标计算结果得到坐标修正结果;
31.存储模块,连接第二处理模块,用于保存坐标修正结果中定位基站和/或传感器的绝对坐标;
32.第三处理模块,连接存储模块,用于基于保存的定位基站和/或传感器的绝对坐标计算第二目标对象的绝对坐标。
33.进一步的,第一处理模块包括:
34.匹配单元,用于对相邻帧的图像数据进行特征匹配获取匹配结果;
35.配准单元,连接匹配单元,用于对相邻帧的点云数据进行配准处理获取配准结果;
36.计算单元,分别连接匹配单元和配准单元,用于结合匹配结果、配准结果、当前帧的所述惯性数据以及前一帧第一目标对象的坐标计算结果获取识别的当前帧的第一目标对象的坐标计算结果。
37.进一步的,计算单元中还包括使用滤波器优化后得到优化后的坐标计算结果。
38.进一步的,第一目标对象包括定位基站,第二目标对象为移动载体;
39.第三处理模块用于根据室内的定位基站的绝对坐标,基于前方交会原理计算移动载体的绝对坐标。
40.本发明的有益技术效果在于:本发明采用slam技术来实现高精度室内绝对坐标系的建立,提高室内外相对位置关系的获取效率,改善室内外多传感期间的相对位置精度,满足室内外定位系统快速、高精度统一归算至绝对坐标系统的需求。
附图说明
41.图1a-1b为现有技术室内定位技术的传感器设置示意图;
42.图1-2为本发明一种建立室内绝对坐标系的方法的步骤流程图;
43.图3-4为本发明一种建立室内绝对坐标系的系统的模块示意图。
具体实施方式
44.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
45.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
46.下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
47.参见图1,本发明提供一种建立室内绝对坐标系的方法,包括预先获取室内的至少
一个第一目标对象的绝对坐标以及获取第二目标对象的绝对坐标两个过程;
48.预先获取室内的第一目标对象的绝对坐标的过程包括如下步骤:
49.步骤a1,携带一组合测量设备,选取一个通过全球导航卫星系统能够直接获得绝对坐标的点作为起始位置,于起始位置启动组合测量设备,组合测量设备包括全球导航卫星系统、相机、激光雷达和惯性测量仪,起始位置的绝对坐标由全球导航卫星系统直接获取;
50.步骤a2,从起始位置开始运动,使用移动过程中携带的组合测量设备实时获取观测数据;观测数据包括由相机捕获的图像数据、激光雷达捕获的点云数据、惯性测量仪捕获的惯性数据,所述观测数据还包括运动过程中由全球导航卫星系统能够直接获取的绝对坐标数据;
51.步骤a3,对相邻帧的观测数据进行处理以获取识别的当前帧的第一目标对象的坐标计算结果,坐标计算结果包括室内的第一目标对象的绝对坐标,其中,室内的第一目标对象包括定位基站和/或传感器;
52.步骤a4,选取一个通过全球导航卫星系统能够直接获得绝对坐标的点作为终点位置结束运动,终点位置的绝对坐标由全球导航卫星系统直接获取;
53.步骤a5,基于从所述起始位置到所述终点位置的移动过程中获取的所述观测数据,执行回环检测修正移动过程中获取的第一目标对象的坐标计算结果得到坐标修正结果;
54.步骤a6,保存坐标修正结果中定位基站和/或传感器的绝对坐标;
55.获取室内的第二目标对象的绝对坐标的步骤包括:
56.步骤b1,基于保存的定位基站和/或传感器的绝对坐标计算第二目标对象的绝对坐标。
57.具体的,从步骤a2的起始位置到步骤a4的终点位置的运动过程中,所述观测数据还包括由全球导航卫星系统能够获取的绝对坐标数据。
58.具体的,由于在室内全球导航卫星系统无法穿透建筑,所以无法在室内定位,室内无法得到由全球导航卫星系统获取的绝对坐标,因此全球导航卫星系统获取的绝对坐标数据属于室外部分。从起始位置到室内之前,从室内走出到终点位置结束,即室外,全球导航卫星系统一直获取绝对坐标,即观测数据包括全球导航卫星系统室外获取的绝对坐标数据。
59.具体的,在所述步骤a3中,根据全球导航卫星系统室外获取的绝对坐标数据,对相邻帧的所述观测数据进行处理以获取识别的当前帧的第一目标对象的坐标计算结果,所述坐标计算结果包括室内的所述第一目标对象的绝对坐标,其中,室内的所述第一目标对象包括定位基站和/或传感器;
60.在步骤a3中,坐标计算结果还包括识别室外的第一目标对象的绝对坐标。在室外,根据图像数据和点云数据连续识别室外的第一目标对象,并且结合室外获取的绝对坐标数据以及惯性数据以及前一帧观测数据得到室外的第一目标对象的坐标计算结果。在室内,当没有全球导航卫星系统获取的绝对坐标数据时,根据图像数据和点云数据连续识别室外的第一目标对象,结合惯性数据以及前一帧的观测数据得到室内的第一目标对象的坐标计算结果。运动过程中只要存在由全球导航卫星系统能够直接获取的绝对坐标数据,均将绝
对坐标数据引入坐标计算中,使得定位基站和/或所述传感器的绝对坐标更准确,识别算法更加优化。
61.具体的,在步骤a5中,执行回环检测使用的观测数据包括由相机捕获的图像数据、激光雷达捕获的点云数据、惯性测量仪捕获的惯性数据以及所述由全球导航卫星系统能够获取的绝对坐标数据,从而修正第一目标对象的所述坐标计算结果得到坐标修正结果。
62.本发明采用slam技术来实现高精度室内绝对坐标系的建立,slam技术是一种新兴的即时定位与地图构建技术,主要应用于机器人运动过程中的自主定位。基于slam技术研发的组合定位设备集成了gnss定位终端、惯性测量仪(inertial measurement unit,imu)、全景高清相机、激光雷达等传感器,在gnss信号遮挡严重的短路径内连续测量绝对坐标精度达到厘米级,该技术应用可以快速精确获取室内外相对位置关系。
63.在本发明中,通过全景相机获得运动过程的高清图像数据、激光雷达实时采集三维点云数据、gnss设备获取外部绝对坐标、imu获取运动过程中的姿态变化数据。初始位置可在室外,由gnss直接获得绝对坐标。运动的结束位置也可在室外,gnss直接获得绝对坐标。运动起始位置要求gnss定位为固定解,且运动过程失锁时间不宜超过150m、运动过程中的转角点速度保持缓慢。
64.开始测量前,按照“8”字形路径运动,对imu进行精度校准。
65.参见图2,进一步的,步骤a2包括:
66.步骤a21,对相邻帧的图像数据进行特征匹配获取匹配结果,以及对相邻帧的点云数据进行配准处理获取配准结果;
67.步骤a22,结合匹配结果、配准结果、当前帧的所述惯性数据以及前一帧第一目标对象的坐标计算结果获取识别的当前帧的第一目标对象的坐标计算结果。
68.进一步的,在步骤a22中包括经过滤波器优化后得到优化后的坐标计算结果。
69.进一步的,第一目标对象包括定位基站,第二目标对象为移动载体;
70.步骤b1,根据室内的定位基站的绝对坐标,基于前方交会原理计算移动载体的绝对坐标。
71.进一步的,室内包括至少4个定位基站。
72.进一步的,在步骤a3中,部分第一目标对象包括定位基站处设置的定位标靶,对相邻帧的观测数据进行处理以获取识别的定位标靶的坐标计算结果,进一步基于定位标靶的坐标计算结果处理得到相应的定位基站的绝对坐标。
73.前端程序对基于相邻帧对图像数据、三维点云数据进行处理,结合同步的imu惯性数据进行归算,结合前次的计算结果计算得到当前的坐标计算结果。后端程序对坐标计算结果进行滤波器图优化处理并计算最优绝对坐标值,尽量减小运动过程中的累计误差。
74.参见图3,本发明还提供一种建立室内绝对坐标系的系统,包括前述的一种建立室内绝对坐标系的方法,包括:
75.触发模块(1),用于在选择第一触发模式下启动系统,在选择第二触发模式下关闭系统;
76.能够携带的组合测量设备(2),连接触发模块(1),用于在启动后被携带着在移动过程中实时获取观测数据,当系统关闭时停止获取观测数据;
77.组合测量设备包括全球导航卫星系统、相机、激光雷达和惯性测量仪,观测数据包
括由相机捕获的图像数据、激光雷达捕获的点云数据、惯性测量仪捕获的惯性数据,所述观测数据还包括运动过程中由全球导航卫星系统能够直接获取的绝对坐标数据;
78.其中,移动的起始位置和终点位置均选取全球导航卫星系统能够直接获得绝对坐标的点;全球导航卫星系统在启动时直接获取起始位置的绝对坐标,关闭时直接获取终点位置的坐标;
79.第一处理模块(3),连接组合测量设备(2),用于对相邻帧的观测数据进行处理以获取识别的当前帧的第一目标对象的坐标计算结果,坐标计算结果包括室内的第一目标对象的绝对坐标;
80.其中,第一目标对象包括定位基站和/或传感器;
81.第二处理模块(4),连接第一处理模块(3),用于基于从起始位置到终点位置的移动过程中获取的观测数据,执行回环检测修正移动过程中获取的第一目标对象的坐标计算结果得到坐标修正结果;
82.存储模块(5),连接第二处理模块(4),用于保存坐标修正结果中定位基站和/或传感器的绝对坐标;
83.第三处理模块(6),连接存储模块(5),用于基于保存的定位基站和/或传感器的绝对坐标计算第二目标对象的绝对坐标。
84.参见图4,进一步的,第一处理模块(3)包括:
85.匹配单元(31),用于对相邻帧的图像数据进行特征匹配获取匹配结果;
86.配准单元(32),连接匹配单元(31),用于对相邻帧的点云数据进行配准处理获取配准结果;
87.计算单元(33),分别连接匹配单元(31)和配准单元(32),用于结合匹配结果、配准结果、当前帧的所述惯性数据以及前一帧第一目标对象的坐标计算结果获取识别的当前帧的第一目标对象的坐标计算结果。
88.进一步的,计算单元(33)中还包括使用滤波器优化后得到优化后的坐标计算结果。
89.进一步的,第一目标对象包括定位基站,第二目标对象为移动载体;
90.第三处理模块(6)用于根据室内的定位基站的绝对坐标,基于前方交会原理计算移动载体的绝对坐标。
91.本发明提供的一种建立室内绝对坐标系的方法和系统,具体应用场景例如,室内定位基站为实现室内定位信号的全覆盖,基站位置经常出现在犄角旮旯;多传感器同步作业时,为保证测量精度,特殊的设备需要安置于特殊位置,内、外部设备一般不能保证直接通视。
92.本方法和系统在室内基站和其他传感器处安装定位标靶,通过本发明的方法和系统拾取定位标靶的绝对坐标,进一步室内基站和其他传感器的绝对坐标,将室内外定位统一至绝对坐标系,可以一次性完成某分布区域的大量定位基站及其他传感器甚至隐蔽基站或隐蔽传感器的绝对坐标信息获取,避免了全站仪式逐站测量的繁琐,提升了将室外定位基准引入室内定位基准的效率。当移动端接收到4个及以上已知绝对坐标的基站信号,根据前方交会原理即可获得该移动端的绝对坐标。此外,根据定位基站及其他传感器两两之间的绝对坐标,可以获得两两之间的相对坐标。
93.以上仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本发明说明书及图示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1