线激光传感器与机器人法兰盘相对位姿标定方法及系统
1.本发明属于光学检测技术,特别是涉及线激光传感器与机器人法兰盘相对位姿标定方法及系统。
背景技术:
2.随着光学检测技术与工业机器人技术的发展,采用工业机器人携带光学检测设备可以实现自动化监测,使得工业机器人具有了一定的感知能力。线激光传感器可以实现二维空间的测量,结合工业机器人的运动,可以实现三维空间物体点云的采集与测量,具有非接触、高精度、高效率的优点。线激光传感器采集的点云数据是基于其自身坐标系的,要实现工业机器人与线激光传感器的结合,需要完成线激光传感器与工业机器人法兰盘相对位姿的标定,从而实现测量点云数据从线激光传感器坐标系到工业机器人基坐标系的转换。线激光传感器与工业机器人法兰盘相对位姿的标定精度直接影响检测的准确性。
3.传统的线激光传感器与工业机器人法兰盘相对位姿标定方法主要为标准球法,其方法无法通过线激光传感器一次测量得到标定物相对于线激光传感器的位姿关系,因此需要多次调整工业机器人位姿,使得线激光传感器以不同的位姿测量标准球,使得标定过程中引入了工业机器人运动学误差,同时标定过程需进行最优解计算,导致操作复杂、标定精度低。
技术实现要素:
4.本发明为解决上述背景技术中存在的技术问题,提供了线激光传感器与机器人法兰盘相对位姿标定方法及系统。解决了线激光传感器与工业机器人法兰盘相对位姿标定过程复杂,标定精度差的问题,简化了标定流程,提高了标定准确性。
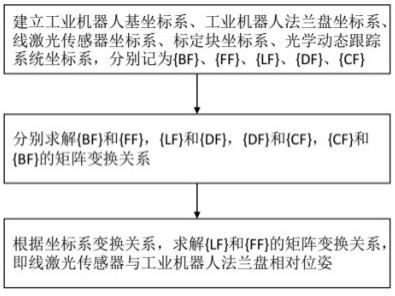
5.本发明采用以下技术方案:一种线激光传感器与机器人法兰盘相对位姿标定方法,包括以下步骤:步骤一、将机器人、法兰盘、标定块、线激光传感器、光学动态跟踪系统以及与光学动态跟踪系统相适配的光笔按照预定位置进行设置;步骤二、标定块、光学动态跟踪系统和光笔构成一标定试验平台,将机器人恢复至初始状态,记机器人坐标系、法兰盘坐标系、线激光传感器坐标系、标定块坐标系、光学动态跟踪系统坐标系分别为{bf}、{ff}、{lf}、{df}、{cf};步骤三、分别求解{bf}和{ff}、{lf}和{df}、{df}和{cf}、{cf}和{bf}的矩阵变换关系,得到、、、;步骤四、基于所述矩阵变换关系,采用以下公式计算得到线激光传感器坐标系与法兰盘坐标系内的相对位姿:。
6.在进一步的实施例中,所述标定块包括:
本体;至少四组半圆柱体,呈放射性排布于所述本体的上表面;相邻的半圆柱体之间的夹角相等。
7.在进一步的实施例中,所述预定位置如下:所述机器人与光学动态跟踪系统为相对设置,中间设置有操作台;所述法兰盘安装在机器人的末端,所述线激光传感器安装在所述法兰盘上;所述标定块固定在操作台上,并位于线激光传感器的测量范围内,保证线激光传感器同时测量任意两个相邻半圆柱和相邻半圆柱之间的本体上表面;所述光学动态跟踪系统同时测量机器人和标定块对应位置。
8.在进一步的实施例中,所述步骤三中的为法兰盘坐标系与机器人坐标系的相对位姿,其计算流程如下:读取当前法兰盘坐标系相对于机器人基坐标系在x、y、z三轴上的对应旋转参数与对应平移参数,通过以下公式求解得到{ff}相对于{bf}的矩阵变换关系:。
9.在进一步的实施例中,为标定块坐标系与线激光传感器坐标系的相对位姿,获取流程如下:获取线激光传感器坐标系下的标定块测量点得到第一点云数据,定义线激光传感器测量到的两个相邻半圆柱体分别为第一半圆柱体和第二半圆柱体,采用最小二乘法拟合圆柱体,分别得到关于第一半圆柱体、第二半圆柱体的第一轴线l1和第二轴线l2参数方程:第一轴线l1: ;第二轴线l2:;其中,为线激光传感器测量到的第一半圆柱体上的任意点坐标,为第一轴线l1的一组方向数;为线激光传感器测量到的第二半圆柱体上的任意点坐标,为第二轴线l2的一组方向数;t为参数方程的参数;基于所述第一点云数据和最小二乘法拟合得到直线l0:直线l0:;
其中,为第一点云数据内的任意点坐标,为直线l0的一组方向数;t为参数方程的参数;利用第一轴线l1、第二轴线l2和直线l0在同一平面上的约束条件,求解得到平面p1:;其中,为平面p1一般方程的系数;将第一轴线l1和第二轴线l2投影到平面p1上,得到第一投影线和第二投影线:第一投影线: ;第二投影线: ;其中,为点在平面p1上的投影坐标,为第一投影线的一组方向数;为点在平面p1上的投影坐标,为第二投影线的一组方向数;获取第一投影线和第二投影线的交点,记为点d1;设点d1为标定块坐标系的原点o
df
,过原点o
df
沿第一投影线所在方向在标定块坐标系内设置x
df
轴,过原点o
df
沿平面p1的法向在标定块坐标系内设置y
df
轴,根据右手定则得到标定块坐标系的y
df
轴,计算得到{df}相对于{lf}的矩阵变换关系。
10.在进一步的实施例中,为标定块坐标系与光学动态跟踪系统坐标系的相对位姿,其计算流程如下:利用光学动态跟踪系统、光笔对标定块的上表面进行测量,得到多组在光学动态跟踪系统坐标系下标定块的上表面测量点得到第二点云数据,采用最小二乘法原理拟合得到平面p2:,其中为平面一般方程的系数;利用光学动态跟踪系统、光笔对标定块的任意相邻两组半圆柱体进行测量,得到多组在光学动态跟踪系统坐标系下相邻两组半圆柱体的点坐标数据;基于最小二乘法,分别计算得到第一圆柱q1和第二圆柱q2,并求解得到关于第一圆柱q1、第二圆柱q2的第三轴线l3和第四轴线l4:
第三轴线l3: ;第四轴线l4: ;其中,为光学动态跟踪系统坐标系内的第一圆柱q1上的任意点坐标,为第三轴线l3的一组方向数;t为参数方程的参数;为光学动态跟踪系统坐标系内的第二圆柱q2上的任意点坐标,为第四轴线l4的一组方向数;t为参数方程的参数;将第三轴线l3和第四轴线l4投影到平面p2上得到第三投影线和第四投影线:第三投影线:;第四投影线:;其中,为点在平面p2上的投影坐标,为第三投影线的一组方向数;为点在平面p2上的投影坐标,为第四投影线的一组方向数;记第三投影线和第四投影线的交点为;记点为标定块坐标系在光学动态跟踪系统坐标系下的原点,过原点沿第三投影线所在方向在标定块坐标系内设置轴,过原点沿平面p2的法向在标定块坐标系内设置轴,即在光学动态跟踪系统坐标系下建立标定块坐标系,求解得到{df}相对于{cf}的矩阵变换关系。
11.在进一步的实施例中,为机器人坐标系与光学动态跟踪系统坐标系的相对位姿,其获取方式如下:于机器人末端粘贴光学动态跟踪系统检测用的靶标点,分别转动机器人的机械臂轴一和轴二,并多次记录靶标点在光学动态跟踪系统坐标系下的坐标值,在光学动态跟踪系统坐标系下建立机器人基坐标系,求解得到{bf}相对于{cf}的矩阵变换关系。
12.一种线激光传感器与机器人法兰盘相对位姿标定系统,包括:机器人,其末端安装有法兰盘;线激光传感器,安装与所述法兰盘上;光学动态跟踪系统,设于所述机器人的对立面;所述机器人与所述光学动态跟踪
系统之间设置有操作台;标定块,固定于所述操作台上;所述标定块包括:本体;至少四组半圆柱体,呈放射性排布于所述本体的上表面;相邻的半圆柱体之间的夹角相等。
13.在进一步的实施例中,所述本体上设置有至少五组螺纹孔。
14.本发明设计了用于线激光传感器标定的标定块,实现了线激光传感器一次测量即可计算得到标定块与线激光传感器相对位姿关系。
15.本发明的有益效果:本发明线激光传感器与工业机器人法兰盘相对位姿标定过程中,不需要移动工业机器人,避免了工业机器人运动学误差的引入,提高了标定精度;解决了传统标定方法求解过程复杂、标定精度差的问题。
16.本发明线激光传感器与工业机器人法兰盘相对位姿标定过程中,采用矩阵方程求解,不需要最优解计算,简化了标定流程,提高了线激光传感器与工业机器人法兰盘相对位姿标定效率。
附图说明
17.图1为本发明流程图。
18.图2为本发明一种线激光传感器与机器人法兰盘相对位姿标定方法原理示意图。
19.图3为本发明标定块结构图。
20.图4为本发明标定块坐标系与线激光传感器坐标系的相对位姿标定方法原理示意图。
21.图5为本发明标定块坐标系与光学动态跟踪系统坐标系的相对位姿标定方法原理示意图。
22.图2至图5中的各标注为:机器人1、法兰盘2、标定块3、线激光传感器4、光学动态跟踪系统5、光笔6、本体201、半圆柱体202、螺纹孔203。
具体实施方式
23.为了更清楚的说明本发明的目的、技术方案和优点,下面结合附图及具体实施例对本发明的技术方案做进一步的详细描述。
24.实施例1如图1和图2所示,本实施例公开了一种线激光传感器与机器人法兰盘相对位姿标定方法,包括以下步骤:步骤一、将机器人、法兰盘、标定块、线激光传感器、光学动态跟踪系统以及与光学动态跟踪系统相适配的光笔按照预定位置进行设置;在本实施例中,采用工业机器人,即六自由度机器人。光学动态跟踪系统为c-track光学动态跟踪系统。
25.为了能够实现线激光传感器的一次测量,因此本实施例涉及了与之相适配的标定块,如图3所示。其中,标定块包括:本体,并其上表面呈放射性的排布有至少四组半圆柱体相邻的半圆柱体之间的夹角相等。在本实施例中,标定块的底座为长方体结构,底座上表面由四个半圆柱组成;所述四个半圆柱沿着底座上表面中心等角度分布,任意相邻两个半圆柱的轴线夹角均为90
°
;所述标定块底座有五个螺纹孔,用于安装固定标定块;所述标定块
为精加工,保证相邻半圆柱轴线的夹角、半圆柱的圆柱度、底座上表面平面度的精度;所述标定块可满足线激光传感器同时测量到任意两个相邻半圆柱和相邻半圆柱之间的底座上表面。
26.在进一步的实施例中,预定位置如下:机器人与光学动态跟踪系统为相对设置,中间设置有操作台;所述法兰盘安装在机器人的末端,所述线激光传感器安装在所述法兰盘上;标定块固定在操作台上,并位于线激光传感器的测量范围内,保证线激光传感器同时测量任意两个相邻半圆柱和相邻半圆柱之间的本体上表面;光学动态跟踪系统同时测量机器人和标定块对应位置。
27.步骤二、标定块、光学动态跟踪系统和光笔构成一标定试验平台,将机器人恢复至初始状态,记机器人坐标系、法兰盘坐标系、线激光传感器坐标系、标定块坐标系、光学动态跟踪系统坐标系分别为{bf}、{ff}、{lf}、{df}、{cf};步骤三、分别求解{bf}和{ff}、{lf}和{df}、{df}和{cf}、{cf}和{bf}的矩阵变换关系,得到法兰盘坐标系与机器人坐标系的相对位姿、标定块坐标系与线激光传感器坐标系的相对位姿、标定块坐标系与光学动态跟踪系统坐标系内的相对位姿、机器人坐标系与光学动态跟踪系统坐标系的相对位姿;步骤四、基于所述矩阵变换关系,采用以下公式计算得到线激光传感器坐标系与法兰盘坐标系内的相对位姿:。
28.在进一步的实施例中,法兰盘坐标系与机器人坐标系的相对位姿的计算流程如下:读取当前法兰盘坐标系相对于机器人基坐标系在x、y、z三轴上的对应旋转参数与对应平移参数,通过以下公式求解得到{ff}相对于{bf}的矩阵变换关系:。
29.如图4所示,标定块坐标系与线激光传感器坐标系的相对位姿的获取流程如下:获取线激光传感器坐标系下的标定块测量点得到第一点云数据,定义线激光传感器测量到的两个相邻半圆柱体分别为第一半圆柱体和第二半圆柱体,采用最小二乘法拟合圆柱体,分别得到关于第一半圆柱体、第二半圆柱体的第一轴线l1和第二轴线l2参数方程:第一轴线l1:;
第二轴线l2:;其中,为线激光传感器测量到的第一半圆柱体上的任意点坐标,为第一轴线l1的一组方向数;为线激光传感器测量到的第二半圆柱体上的任意点坐标,为第二轴线l2的一组方向数;t为参数方程的参数;基于所述第一点云数据和最小二乘法拟合得到直线l0:直线l0:;其中,为第一点云数据内的任意点坐标,为直线l0的一组方向数;t为参数方程的参数;利用第一轴线l1、第二轴线l2和直线l0在同一平面上的约束条件,求解得到平面p1:;其中,为平面p1一般方程的系数;将第一轴线l1和第二轴线l2投影到平面p1上,得到第一投影线和第二投影线:第一投影线: ;第二投影线: ;其中,为点在平面p1上的投影坐标,为第一投影线的一组方向数;为点在平面p1上的投影坐标,为第二投影线的一组方向数;获取第一投影线和第二投影线的交点,记为点d1;设点d1为标定块坐标系的原点o
df
,过原点o
df
沿第一投影线所在方向在标定块坐标系内设置x
df
轴,过原点o
df
沿平面p1的法向在标定块坐标系内设置y
df
轴,根据右手定则得到标定块坐标系的y
df
轴,计算得到{df}相对于{lf}的矩阵变换关系。
30.如图5所示,标定块坐标系与光学动态跟踪系统坐标系内的相对位姿的计算流程如下:利用光学动态跟踪系统、光笔对标定块的上表面进行测量,得到多组在光学动态跟
踪系统坐标系下标定块的上表面测量点得到第二点云数据,采用最小二乘法原理拟合得到平面p2:,其中为平面p2一般方程的系数;利用光学动态跟踪系统、光笔对标定块的任意相邻两组半圆柱体进行测量,得到多组在光学动态跟踪系统坐标系下相邻两组半圆柱体的点坐标数据;基于最小二乘法,分别计算得到第一圆柱q1和第二圆柱q2,并求解得到关于第一圆柱q1、第二圆柱q2的第三轴线l3和第四轴线l4:第三轴线l3: ;第四轴线l4: ;其中,为光学动态跟踪系统坐标系内的第一圆柱q1上的任意点坐标,为第三轴线l3的一组方向数;t为参数方程的参数;为光学动态跟踪系统坐标系内的第二圆柱q2上的任意点坐标,为第四轴线l4的一组方向数;t为参数方程的参数;将第三轴线l3和第四轴线l4投影到平面p2上得到第三投影线和第四投影线:第三投影线:;第四投影线:;其中,为点在平面p2上的投影坐标,为第三投影线的一组方向数;为点在平面p2上的投影坐标,为第四投影线的一组方向数;记第三投影线和第四投影线的交点为;记点为标定块坐标系在光学动态跟踪系统坐标系下的原点,过原点沿第三投影线所在方向在标定块坐标系内设置轴,过原点沿平面p2的法向在标定块坐标系内设置轴,即在光学动态跟踪系统坐标系下建立标定块坐标系,求解得到{df}相对于{cf}的矩阵变换关系。
31.机器人坐标系与光学动态跟踪系统坐标系的相对位姿的获取方式如下:于机器人末端粘贴光学动态跟踪系统检测用的靶标点,分别转动机器人的机械臂轴一和轴二,
并多次记录靶标点在光学动态跟踪系统坐标系下的坐标值,在光学动态跟踪系统坐标系下建立机器人基坐标系,求解得到{bf}相对于{cf}的矩阵变换关系。
32.本实施例提供了一种线激光传感器与机器人法兰盘相对位姿标定方法,解决了线激光传感器与工业机器人法兰盘相对位姿标定过程复杂,标定精度差的问题,简化了标定流程,提高了标定准确性。
33.基于本实施例的方法,进行线激光传感器与机器人法兰盘相对位姿标定,获取的实验数据如下:
实施例2本实施例为实现实施例1所述的方法,公开了一种线激光传感器与机器人法兰盘相对位姿标定系统,包括:工业机器人1,具有至少两个机械臂。工业机器人1的末端安装有法兰盘2,法兰盘2上设置有线激光传感器4。还包括设置在工业机器人1对立面的光学动态跟踪系统5,以及与光学动态跟踪系统5相适配的光笔6,机器人1与所述光学动态跟踪系统5之间设置有操作台。操作台则用于固定标定块3。在进一步的实施例中,标定块3包括:本体201;至少四组半圆柱体202,呈放射性排布于所述本体201的上表面;相邻的半圆柱体202之间的夹角相等。在本实施例中,标定块3的底座为长方体结构,底座上表面由四个半圆柱组成;所述四个半圆柱沿着底座上表面中心等角度分布,任意相邻两个半圆柱的轴线夹角均为90
°
;所述标定块3底座有五个螺纹孔203,用于安装固定标定块3。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1