支柱瓷绝缘子载荷监测的激光光斑自动调节装置及方法与流程
1.本发明属于电网支柱瓷绝缘子应力监测技术领域,特别是一种支柱瓷绝缘子载荷监测的激光光斑自动调节装置及方法。
背景技术:
2.支柱瓷绝缘子在电网输配电环节中起支撑与绝缘作用,其在服役过程中由于复杂应力的作用,会发生突然断裂,造成严重安全事故。为此,需要对支柱瓷绝缘子的受力状况进行测量。在众多载荷测量手段中,激光超声因为其远距离、高精度等优点,目前已经成为支柱瓷绝缘子的载荷测量的研究热点,且有潜力成为带电状态下绝缘子载荷监测的重要手段。
3.激光超声测量绝缘子的基本原理是基于声弹性效应,即超声传播的声速与载荷之间存在线性或非线性关系。通过准确的测量超声传播声速,即可实现载荷的精确推算。由于超声声速测量主要采用传播距离除以传播时间的原理。对于激光超声而言,当采用高分辨率仪器保证传播时间的测量精度后,准确的测量和控制超声传播距离(即光斑间距)成为制约载荷测量的关键。
4.现有激光超声系统主要适用于平面部件测量的局限性,针对支柱绝缘子的圆弧曲面和远距离测量特点,其激光光斑调节存在位置调整灵活性低与精度差等问题,在实际测量应用过程中,还存在需要改进的地方:
5.首先,激光超声测量的时候需要将激励激光的光斑和接收激光的光斑调整的指定区域。目前的激光超声系统由于自动化程度较低,需要通过偏转振镜等工具人为调整,因此远距离测量存在仪器调整过程繁琐且效率低下问题。
6.其次,激光超声载荷测量需要精确测量激励光斑和接收激光之间的光斑间距。精确的光斑间距测量是实现超声波传播速度和高精度载荷测量的关键。但是由于支柱绝缘子为弧形结构,当两束光斑入射到绝缘子表面时,其间距实际上为弧形,需要进一步的修正。
7.因此,为提升现有激光超声载荷测量装备及方法的精度和效率,因此亟待开发一种用于支柱瓷绝缘子载荷监测的激光光斑自动调节装置及方法。
技术实现要素:
8.本发明的目的是提供一种用于支柱瓷绝缘子载荷监测的激光光斑自动调节装置及方法,用以解决支柱绝缘子的圆弧曲面和远距离测量特点导致的激光位置调整灵活性与精度差的问题。
9.为解决以上技术问题,本发明采用的一种技术方案为:支柱瓷绝缘子载荷监测的激光光斑自动调节装置,其包括:
10.振镜模块,用于调节激光光斑位置;
11.动态聚焦镜,用于聚焦激光光束;
12.视觉测量模块,用于光斑捕捉与定位;
13.控制软件,用于视觉测量模块、振镜模块和动态聚焦镜三者间的协同控制。
14.进一步地,所述振镜模块、动态聚焦镜和视觉测量模块按照光学同轴的方式排列和固定。
15.本发明采用的另一种技术方案为:支柱瓷绝缘子载荷监测的激光光斑自动调节方法,其采用上述的支柱瓷绝缘子载荷监测的激光光斑自动调节装置,利用视觉测量模块实现绝缘子边缘直线和光斑质心的抓取、光斑间距和偏斜角度测量,指导振镜模块和动态聚焦镜进行光斑位置的灵活调节;通过基于振镜模块调节和视觉引导相结合的圆弧表面激光光斑位置控制方法,实现激光超声信号的远距离、高精度激励与接收。
16.进一步地,所述的视觉测量模块实现如下步骤:
17.s1.利用视觉测量模块进行绝缘子及照射在绝缘子上的激光光斑的图像采集和处理,获得32位彩色图片并处理成8位灰度图矩阵;
18.s2.利用k-means算法进行灰度图像的分割处理,利用手肘法和轮廓系数法确定聚类数;
19.s3.对聚类分割后的灰度图像进行概率霍夫变换,并检测灰度图像中的支柱瓷绝缘子边缘直线,得到绝缘子边缘直线坐标矩阵;
20.s4.计算灰度图像中绝缘子两边缘的像素直径,查询该型号绝缘子的实际直径,计算绝缘子的实际直径与像素直径之比,得到比例因子m;
21.s5.进一步检测概率霍夫变换后的灰度图,提取激光光斑轮廓,获得激光光斑轮廓矩阵;
22.s6.利用获得的激光光斑轮廓矩阵分别计算激励光斑与接收光斑轮廓质心坐标,并计算激光光斑质心坐标距离;
23.s7.利用激光光斑质心坐标距离与步骤s4所述比例因子m相乘,得到激光光斑直线距离s;
24.s8.计算两个激光光斑质心连线与绝缘子边缘线的夹角,记录为偏斜角度θ;
25.s9.利用激光光斑直线距离s和偏斜角度θ,根据绝缘子圆柱曲面方程,计算两个光斑在圆弧面上的光斑实际距离sr。
26.进一步地,利用所述振镜模块,通过设置和对比所述视觉测量模块得到的偏斜角度θ,调整测量应力的种类,当设置偏斜角度为0
°
时,作为弯曲应力测量模式,当设置偏斜角度为90
°
时,作为扭转应力测量模式。
27.进一步地,通过设置和对比所述视觉测量模块得到的光斑实际距离sr,精确计算超声传播声速和载荷值。
28.进一步地,在完成视觉测量后,利用所述动态聚焦镜调节激光的聚焦状态,使激光聚焦在绝缘子表面。
29.进一步地,步骤s2中,所述k-means算法的参数设置为:最大迭代次数为10次,收敛最小阈值为1.0,最佳聚类数为3。
30.本发明具有的有益效果如下:
31.本发明可通过脉冲激光器与振镜模块以及动态聚焦镜配合,实现支柱瓷绝缘子扫描范围全面覆盖,同时保护绝缘子表面釉层不受损伤。
32.本发明通过基于振镜模块调节和视觉引导相结合的圆弧表面激光光斑位置控制
方法,实现了激光超声信号的远距离、高精度激励与接收,解决了支柱绝缘子的圆弧曲面和远距离测量特点导致的激光位置调整灵活性与精度差的问题。
附图说明
33.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
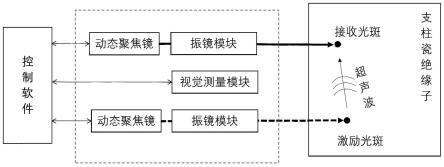
34.图1为本发明具体实施方式中的装置示意图;
35.图2为本发明具体实施方式中的方法流程图。
具体实施方式
36.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
37.实施例1
38.本实施例提供一种用于支柱瓷绝缘子载荷监测的激光光斑自动调节装置,如图1所示,包括用于激光光斑位置调节的振镜模块、用于激光光束聚焦的动态聚焦镜、用于光斑捕捉与定位的视觉测量模块以及控制软件。所述的控制软件用于视觉测量模块、振镜模块和动态聚焦镜三者间的协同控制。
39.所述振镜模块、动态聚焦镜和视觉测量模块按照光学同轴的方式排列和固定。
40.实施例2
41.本实施例提供一种用于支柱瓷绝缘子载荷监测的激光光斑自动调节方法,其采用实施例1所述的支柱瓷绝缘子载荷监测的激光光斑自动调节装置,利用视觉测量模块实现绝缘子边缘直线和光斑质心的抓取、光斑间距和偏斜角度测量,指导振镜模块和动态聚焦镜进行光斑位置的灵活调节;通过基于振镜模块调节和视觉引导相结合的圆弧表面激光光斑位置控制方法,实现激光超声信号的远距离、高精度激励与接收。
42.如图2所示,所述视觉测量模块实现如下步骤:
43.s1.图像采集:利用视觉测量模块进行绝缘子及照射在绝缘子上的激光光斑的图像采集,将获得32位彩色图片进行图像处理,并处理成8位灰度图矩阵。
44.s2.图像分割:利用k-means图像分割算法进行灰度图像的分割处理,设置最大迭代次数为10次,收敛最小阈值为1.0。利用手肘法和轮廓系数法确定最佳聚类数为3。
45.s3.概率霍夫变换:对聚类分割后的灰度图像进行概率霍夫变换,并检测灰度图像中的支柱瓷绝缘子边缘直线,得到绝缘子边缘直线坐标矩阵。
46.s4.比例因子计算:计算灰度图像中绝缘子两边缘的像素直径为312mm,查询该型号绝缘子的实际直径为318mm,计算绝缘子的实际直径与像素直径之比,得到比例因子m=1.02。
47.s5.激光光斑轮廓提取:进一步检测概率霍夫变换后的灰度图像,提取激光光斑轮
廓,获得激光光斑轮廓矩阵。
48.s6.绝缘子轮廓提取:利用获得的光斑轮廓矩阵分别计算激励光斑与接收光斑轮廓质心坐标,并计算质心坐标距离22.4mm。
49.s7.光斑直线距离计算:利用激光光斑质心坐标距离与步骤s4所述比例因子m相乘,得到激光光斑直线距离s=22.85mm;s8.振镜角度调节:计算两个激光光斑质心连线与绝缘子边缘线的夹角,记录偏斜角度θ;利用所述振镜模块调整偏斜角度为90
°
,作为扭转应力测量模式。
50.s9.光斑弧面距离计算:利用激光光斑直线距离s和偏斜角度θ,根据绝缘子圆柱曲面方程,计算两个光斑在圆弧面上的光斑实际距离sr=23.86mm,用于后续声速和载荷计算。
51.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1