一种房屋承重墙垂直度检测装置的制作方法
本发明涉及建筑施工领域,尤其是房屋承重墙垂直度检测装置。
背景技术:
1、在建筑施工时,为保证建筑的质量和安全,需要对墙体垂直度进行检测,尤其是承重墙的垂直度尤为重要。
2、传统的吊锤方式,需要在高处悬挂重物,需要登高使用,使用不便,以无法获得墙面任意点的垂直度数值。
3、cn202221734434.0提供了一种垂直度快速检测仪,不需要登高使用,但受限于立杆的长度,仅能对有限的较低范围进行测量。
4、cn202111503892.3公开了一种建筑测量用墙面垂直度检测装置,同样仅能对相对较低的位置进行测量,并且难以获得一个量化的测量指标。
5、利用激光测量可以克服机械结构测量的各种受限条件,从而具有较大的优势,如何利用实现无接触的测量并获得可量化的测量值成为行业一个重点研究的方向。
技术实现思路
1、本发明的目的在于提供一种房屋承重墙垂直度检测装置,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
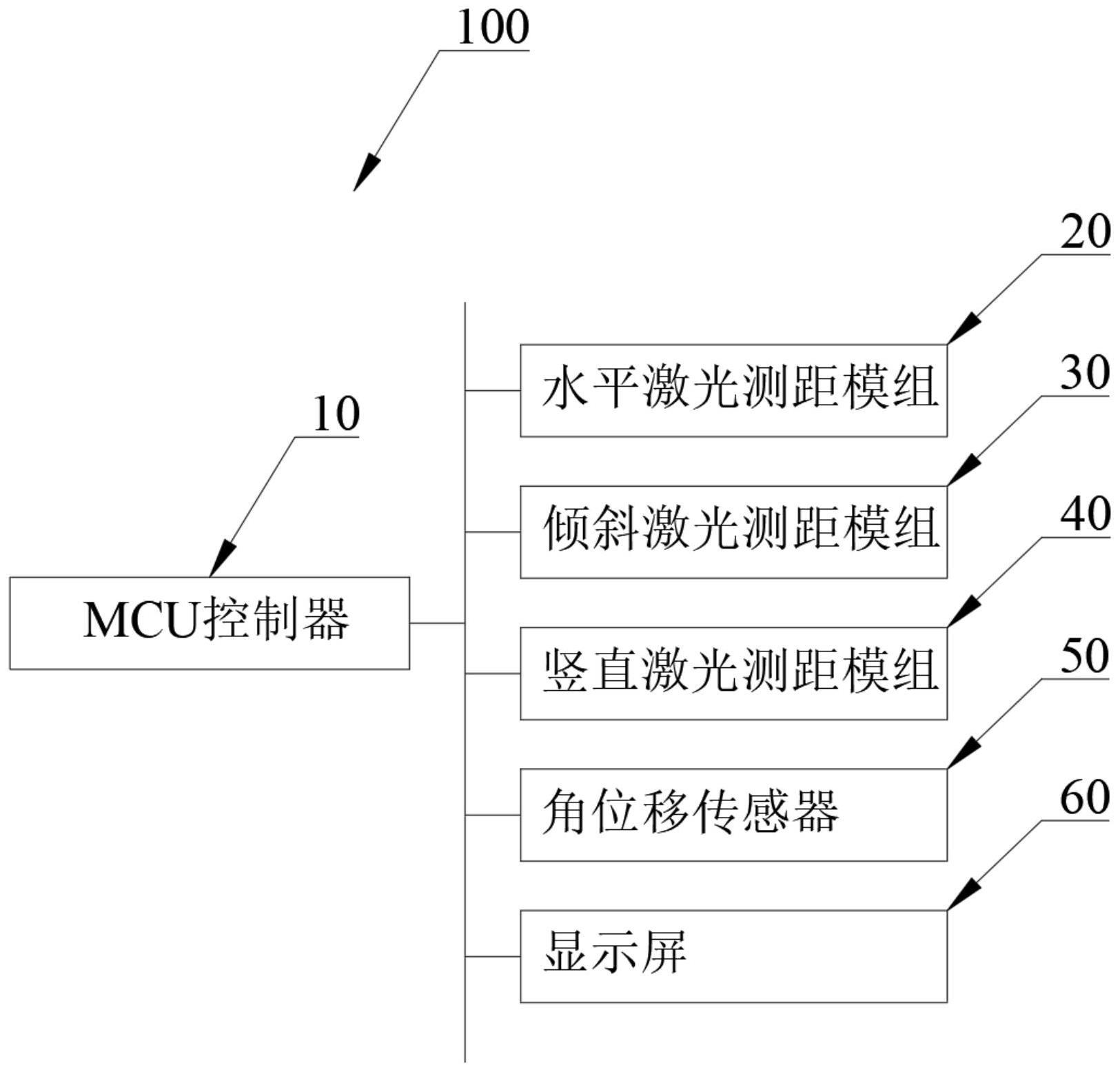
3、一种房屋承重墙垂直度检测装置,包括:mcu控制器、水平激光测距模组、倾斜激光测距模组、竖直激光测距模组和角位移传感器;水平激光测距模组、倾斜激光测距模组、竖直激光测距模组和角位移传感器均与mcu控制器通讯连接;
4、水平激光测距模组用于测量一种房屋承重墙垂直度检测装置到房屋承重墙的水平距离;倾斜激光测距模组用于测量一种房屋承重墙垂直度检测装置到被测点的直线距离;竖直激光测距模组用于测量一种房屋承重墙垂直度检测装置到被测点的高度距离;角位移传感器用于检测倾斜激光测距模组的倾斜角度;
5、一种房屋承重墙垂直度检测装置具有基于高度距离测算垂直度的第一检测模式和基于倾斜角度测算垂直度的第二检测模式;
6、在第一检测模式时,水平激光测距模组启动测量出水平距离l1,竖直激光测距模组启动测量出竖直距离h1,倾斜激光测距模组启动测量出直线距离s1,被测点的垂直度计算值
7、在第二检测模式时,水平激光测距模组启动测量出水平距离l2,倾斜激光测距模组启动测量出直线距离s2,角位移传感器启动测量出倾斜激光测距模组的倾斜角度β,被测点的垂直度计算值δl=l2-s2*cosβ。
8、上述一种房屋承重墙垂直度检测装置进一步地,一种房屋承重墙垂直度检测装置还包括:显示屏;显示屏用于显示被测点的垂直度计算值。
9、上述一种房屋承重墙垂直度检测装置进一步地,第一检测模式的测量过程包括以下步骤:
10、步骤1,对一种房屋承重墙垂直度检测装置进行调平;
11、步骤2,用户调节倾斜激光测距模组使激光照射点指向被测点;
12、步骤3,水平激光测距模组、竖直激光测距模组和倾斜激光测距模组将测量数据传输至mcu控制器;
13、步骤4,mcu控制器向显示屏输出被测点的垂直度计算值;
14、步骤5,显示屏显示被测点的垂直度计算值。
15、上述一种房屋承重墙垂直度检测装置进一步地,第二检测模式的测量过程包括以下步骤:
16、步骤1,对一种房屋承重墙垂直度检测装置进行调平;
17、步骤2,用户调节倾斜激光测距模组使激光照射点指向被测点;
18、步骤3,角位移传感器将当前倾斜激光测距模组的倾斜角度传输至mcu控制器;
19、步骤4,水平激光测距模组和倾斜激光测距模组进行测量并将测量数据传输至mcu控制器;
20、步骤5,mcu控制器向显示屏输出被测点的垂直度计算值;
21、步骤6,显示屏显示被测点的垂直度计算值。
22、上述一种房屋承重墙垂直度检测装置进一步地,一种房屋承重墙垂直度检测装置的控制方法,包括以下步骤:
23、步骤1、基于用户选择将当前模式调整为第一检测模式或第二检测模式;
24、步骤2、mcu控制器控制当前模式所需使用的模组和传感器处于待机状态;
25、步骤3、在接收到测量指令后,待机状态下的模组和传感器启动进行测量并将测量结果传输至mcu控制器。
26、上述一种房屋承重墙垂直度检测装置进一步地,显示屏还能够显示当前测量模式以及水平激光测距模组、竖直激光测距模组、倾斜激光测距模组和角位移传感器的测量值。
27、上述一种房屋承重墙垂直度检测装置进一步地,一种房屋承重墙垂直度检测装置还包括:锂电池;
28、锂电池为显示屏、水平激光测距模组、倾斜激光测距模组、竖直激光测距模组、角位移传感器和mcu控制器供电。
29、上述一种房屋承重墙垂直度检测装置进一步地,一种房屋承重墙垂直度检测装置设有底座;水平激光测距模组、倾斜激光测距模组和竖直激光测距模组安装至底座;
30、底座设有调平液泡和三个可调节支撑脚;调平液泡用于辅助调平;通过对三个可调节支撑脚的长条调节实现对底座的调平从而实现水平激光测距模组、倾斜激光测距模组和竖直激光测距模组的调平。
31、上述一种房屋承重墙垂直度检测装置进一步地,一种房屋承重墙垂直度检测装置还包括秋千架;水平激光测距模组、倾斜激光测距模组和竖直激光测距模组通过秋千架进行吊装依靠重力实现自动调平。
32、上述一种房屋承重墙垂直度检测装置进一步地,一种房屋承重墙垂直度检测装置还包括:倾角传感器和报警器;倾角传感器用于检测一种房屋承重墙垂直度检测装置的倾斜角度;报警器在倾角传感器检测到一种房屋承重墙垂直度检测装置当前倾角超出一种房屋承重墙垂直度检测装置的自动调平范围时发出报警提示音。
33、与现有技术相比,本发明的有益效果是:具有两种测量模式,可以实现对垂直度的测算。
34、可以激光进行测算可以实现远距离无接触的测量。可以获得墙面任意点的垂直度。
35、第一检测模式可以应用于带有顶部辅助测量点的情况进行测量。通过顶部辅助测量点辅助实现竖直激光测距模组的高度距离的测量。例如有楼板或天花板的应用场景下,借助楼板或天花板辅助实现竖直激光测距模组的高度距离的测量。该测量模式具有相对较高的测量精度。
36、第二检测模式则可以应用到无顶部辅助测量点的情况进行测量,由于无法获得高度距离的测量,利用角位移传感器测量倾斜激光测距模组的倾斜角度β以辅助测算。该模式可以应用到承重墙外墙面的垂直度检测。第二检测模式中存在角位移传感器和倾斜激光测距模组的测量误差叠加,并且受限于角位移传感器的精度影响较大,整体测量精度略低于第一检测模式的测量误差。但能够实现无任何参照的墙面任意点的测量。
37、本发明的其他特点和优点将会在下面的具体实施方式、附图中详细的揭露。
技术特征:
1.一种房屋承重墙垂直度检测装置,其特征在于,包括:mcu控制器、水平激光测距模组、倾斜激光测距模组、竖直激光测距模组和角位移传感器;所述水平激光测距模组、所述倾斜激光测距模组、所述竖直激光测距模组和所述角位移传感器均与所述mcu控制器通讯连接;
2.根据权利要求1所述的一种房屋承重墙垂直度检测装置,其特征在于,
3.根据权利要求2所述的一种房屋承重墙垂直度检测装置,其特征在于,
4.根据权利要求2所述的一种房屋承重墙垂直度检测装置,其特征在于,
5.根据权利要求2所述的一种房屋承重墙垂直度检测装置,其特征在于,
6.根据权利要求2所述的一种房屋承重墙垂直度检测装置,其特征在于,
7.根据权利要求2所述的一种房屋承重墙垂直度检测装置,其特征在于,
8.根据权利要求1所述的一种房屋承重墙垂直度检测装置,其特征在于,
9.根据权利要求1所述的一种房屋承重墙垂直度检测装置,其特征在于,
10.根据权利要求9所述的一种房屋承重墙垂直度检测装置,其特征在于,
技术总结
本发明涉及一种房屋承重墙垂直度检测装置,包括:MCU控制器、水平激光测距模组、倾斜激光测距模组、竖直激光测距模组和角位移传感器;水平激光测距模组用于测量一种房屋承重墙垂直度检测装置到房屋承重墙的水平距离;倾斜激光测距模组用于测量一种房屋承重墙垂直度检测装置到被测点的直线距离;竖直激光测距模组用于测量一种房屋承重墙垂直度检测装置到被测点的高度距离;角位移传感器用于检测倾斜激光测距模组的倾斜角度;一种房屋承重墙垂直度检测装置具有基于高度距离测算垂直度的第一检测模式和基于倾斜角度测算垂直度的第二检测模式。本发明的有益效果是:具有两种测量模式,可以实现对垂直度的测算。
技术研发人员:林斌,郑文华,祝超,吴江洲,赵亚娟,吴卓华
受保护的技术使用者:中国国检测试控股集团浙江有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!