一种基于窄脉冲激光器的长距离测距方法与流程
1.本发明涉及激光测距技术领域,尤其是一种基于窄脉冲激光器的长距离测距方法。
背景技术:
2.近些年,单光子激光测距技术迅速发展,在工业生产乃至日常生活中,逐渐占据重要地位。单光子激光测距利用单光子探测器测量能量小于单个光子的光脉冲信息,以实现远距离测距,其工作原理主要是通过飞行时间进行目标测距,即通过激光器发射激光,激光照射到目标物体之后,目标物体将激光漫反射回来,通过光学接收系统将反射信号接收到探测器靶面,通过计时模块记录激光出射产生起始信号时间以及接收到目标物体反射回波产生终止信号时间,则目标距离l可由公式l= c (t2-t1)/2 求得,其中c为光在真空中的传播速度,t1、t2 分别是信号起始时间、终止时间。
3.传统飞行时间法激光测距的弊端在于,激光在空气中受到大气的扰动,导致激光衰减太快,所以测量距离越远所需要的激光发射的能量就越大;因此尽管基于飞行时间法的单脉冲测距技术日益成熟,但是单脉冲测距系统的测程受限,通常只有数百米。与此同时,大功率激光器的体积和重量都比较大,因此很多领域大功率连续激光测距系统的应用会受到限制。
4.现有单脉冲测距通常选用波长为532nm或1064nm的激光器,脉冲宽度在几百微秒或毫秒级别,光源重复频率较低,仅为khz级别,结合基于tdc(时间数字转换器)的光子计数方法,统计时长至少需要数十秒时间,还需经过最优值算法(例如深度学习算法)得出最优值,整个过程耗时较长;并且这两个波长的激光容易造成人眼损伤,安全性较差。
5.虽然随着激光器技术不断发展,脉冲激光的脉宽已经实现皮秒量级,但是目前tdc的响应速度最大只能达到mhz级别,无法达到ghz级别,因此限制了窄脉冲激光器在单光子激光测距上的应用。
技术实现要素:
6.针对现有单光子激光测距技术测程受限的问题,本发明提出一种基于窄脉冲激光器的长距离测距方法。
7.一种基于窄脉冲激光器的长距离测距方法,主控系统包括发光模块和收光模块,发光模块和收光模块共享同一时钟基准,其中主控系统优选fpga,窄脉冲激光器优选皮秒激光器,尤其是ghz以上光重复频率的皮秒激光器,单光子探测器优选铟镓砷单光子探测器。
8.发光模块随机产生由0和1组成的一串数字序列a;数字序列a经过整形电路驱动窄脉冲激光器发出光脉冲信号,其中随机数1对应有光脉冲,随机数0对应无光脉冲;该光脉冲信号发射至目标物体再反射至单光子探测器,单光子探测器将其接收到的单光子信号传递至收光模块,收光模块对接收到的单光子信号进行时序标记,形成一串
由0和1组成数字序列b,其中数字1对应有光子,数字0对应无光子;再将数字序列b与数字序列a进行时序匹配,从而确定光子飞行时间,实现对目标距离测量。
9.进一步的,时序匹配是将数字序列b与数字序列a进行前后遍历的对位比较统计,直至比较统计结果为无光计数值<k*单光子探测器暗计数,则时序匹配成功,其中无光计数值为数字序列b中与数字序列a中的数字0对位的数字1的数量,其中1≤k≤30。
10.进一步的,前后遍历的过程为,先将数字序列b的第一个数字1与数字序列a的第一个数字1对位,然后进行比较统计,若无光计数值<k*单光子探测器暗计数,则时序匹配成功;若无光计数值≥k*单光子探测器暗计数,则时序匹配失败,将数字序列b的第一个数字1后移一个时基,使其与数字序列a的第二个数字1对位,继续进行比较统计,以此类推,若直至数字序列b的第一个数字1的后移次数达到移动阈值,仍未时序匹配成功,则将数字序列b的第二个数字1与数字序列a的第一个数字1对位,继续进行比较统计,以此类推,直至匹配成功。
11.本发明的技术效果:1、实现1000公里以上的距离测量,并且测量速度快、精度高、容忍衰减大;2、皮秒激光器体积小、重量轻,配合同样体积小、探测效率高的铟镓砷单光子探测器,便于集成为小型单光子测距仪器;3、随着量子信息技术的发展,核心器件窄脉冲激光器和单光子探测器的性能愈发高速和高效,彼时采用本实施例提出的单光子激光测距方案能够实现更长距离、更高精度、更快速度的距离测量。
附图说明
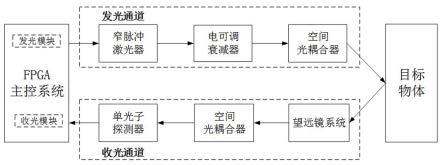
12.图1为实施例1公开的测距系统的结构框图;图2为在fpga时基下,发光模块产生的随机数和皮秒激光器发出的光脉冲示意图;图3为在fpga时基下,收光模块接收到的单光子信号示意图;图4无光计数值变化示意图。
具体实施方式
13.下面结合附图和具体实施方式对本发明作进一步详细的说明。本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
14.实施例1本实施例公开的测距系统如图1所示,包括fpga主控系统以及发光通道、收光通道,主控系统包括发光模块和收光模块,发光模块和收光模块共享同一时钟基准。发光通道依次由窄脉冲激光器、电可调衰减器、空间光耦合器组成,收光通道依次由望远镜系统、空间光耦合器、单光子探测器组成。
15.本实施例中的窄脉冲激光器为通信波段的超窄脉冲皮秒激光器,脉宽约50ps,每个光脉冲上初始携带若干个光子的时间信息,经过长距离的衰减后(电可调衰减器配合调整),每个脉冲上衰减为1个光子或无光子,则可以利用单光子探测器实现窄脉冲上的光子
探测,再利用fpga主控系统实现单光子探测器输出的单光子信号的时间探测,从而确定光子飞行时间,实现对目标距离测量。
16.本实施例公开的测距系统的测量精度取决于窄脉冲激光器的光重复频率,例如若采用2.5ghz光重复频率的皮秒激光器,即光脉冲间隔是400ps,那么400ps光子飞行距离为400ps*3*108m/s=120mm,此值即为本实施例公开的测距系统可以达到的测量精度,其中3*108m/s为电磁波在真空中的传播速度。
17.此外,通过计算可以得1000km的距离光子来回飞行时间约为2000km/300000km/s=6.67ms,10000km的距离光子来回飞行时间约为66.7ms。
18.本实施例在高重频2.5ghz的皮秒脉冲下,发送100ms的光脉冲,也即250m个光脉冲,那么经过10000km收回光脉冲数量不小于单光子探测器暗计数10倍的水平,即可成功实现目标距离的测量。
19.例如,一般铟镓砷单光子探测器的暗计数为10-6
级别,也即收光模块接收到的光子数量不小于250m*10-6
*10=2500,那么可以计算得到发送250m个每脉冲的平均光子数n需大于10-5
,则收端的光强pr=nhfc/λ=3.2*10-15
w,其中h为普朗克常量,c为光速,f为脉冲重复频率,λ为波长;再根据发端2.5ghz激光器的功率一般为pt=1mw,可推算出本系统最大容忍的衰减为l=10lg(pt/pr)=120db。
20.皮秒激光器发送100ms的光脉冲信号,经过10000km距离的来回飞行后,收光模块在66.7ms结束光的探测,并将接收到的单光子信号与皮秒激光器发出的光脉冲信号进行时序匹配。以收端100ms收到5m个计数为例,这是单光子探测器目前最大的饱和计数,那么一次时序匹配累加最大5m次,一次加法耗时最大不超过100ns,那么5m次不超过500ms,对于时序位移再进行累加的操作,fpga可以进行并行运算,因此总共耗时最大不超过500ms,即可在500ms内推算出接收到的单光子信号与皮秒激光器发出的光脉冲信号准确的对应关系,从而确定光子飞行时间,实现对目标距离测量。也就是说,整个测距过程可在1s内完成。
21.与此同时,皮秒激光器体积小、重量轻,配合同样体积小、探测效率高的铟镓砷单光子探测器,便于集成为小型单光子测距仪器,实现1000km以上距离的快速、高精度测量。随着量子信息技术的发展,核心器件窄脉冲激光器和单光子探测器的性能愈发高速和高效,彼时采用本实施例提出的单光子激光测距方案能够实现更长距离、更高精度、更快速度的距离测量。
22.由于常规单光子探测器的探测效率在20-30%左右,再加上光衰减,收光模块收到的光子数量要远小于发光模块发送的光脉冲数量,但最终收光模块接收到的单光子信号一定与窄脉冲激光器发出的光脉冲信号存在唯一对应关系,时序匹配算法就是找到该对应关系,再结合光脉冲发出时间和单光子接收时间,得到光子飞行时间,进而得到准确的目标距离。
23.为了便于时序匹配,以窄脉冲激光器发出250m个光脉冲为例,发光模块对光脉冲信号中每个光脉冲的位置信息进行标记,其中随机数1对应有光脉冲,随机数0对应无光脉冲。收光模块在发光模块发出第一个随机数字时开始标记计数,每个时钟基准计数自加1,并对接收到的光子进行位置标记,待计数到250m完后,停止标记。虽然此过程会丢失部分光子,但是这部分丢失的光子并不会影响匹配结果。下面结合具体图示对时序匹配过程进行进一步阐述。
24.图2给出了在fpga时基下,发光模块产生的前12个随机数和皮秒激光器发出的前12个光脉冲;图3给出了在fpga时基下,收光模块接收到的前10个时基的单光子信号。
25.首先,收光模块将接收到的第一个光子(即数字序列b的第二个数字,第一个数字1,位置信息n+4),与数字序列a的第一个数字1(位置信息1)对位,则收光模块接收到的第二个光子(由于第三个数字为0,表示无光子,第二个光子对应数字序列b的第四个数字,位置信息n+6)自然与数字序列a的第三个数字(位置信息3)对位,而位置信息3无光脉冲;收光模块接收到的第三个光子(由于第五、六个数字为0,表示无光子,第三个光子对应数字序列b的第七个数字,位置信息n+9)自然与数字序列a的第六个数字(位置信息6)对位,位置信息6有光脉冲,以此类推。
26.无光计数值为数字序列b中与数字序列a中的数字0对位的数字1的数量,上述数字序列b的第四个数字(收光模块接收到的第二个光子)就属于与数字序列a中的数字0对位的数字1。无光计数值就等于数字序列b中这样的数字1的数量。
27.假设经过上述对位比较统计,无光计数值≥10*单光子探测器暗计数,则时序匹配失败,则将收光模块接收到的第一个光子后移一个时基,使其与数字序列a的第二个数字1(位置信息2)对位,继续进行比较统计。
28.收光模块将接收到的第一个光子(位置信息n+4)与数字序列a的第二个数字1(位置信息2)对位,则收光模块接收到的第二个光子(位置信息n+6)自然与数字序列a的第四个数字(位置信息4)对位,位置信息4有光脉冲;收光模块接收到的第三个光子(位置信息n+9)自然与数字序列a的第七个数字(位置信息7)对位,位置信息7有光脉冲,以此类推。
29.假设经过上述对位比较统计,无光计数值≥10*单光子探测器暗计数,则时序匹配失败,直至收光模块接收到的第一个光子后移p个时基,无光计数值<10*单光子探测器暗计数,时序匹配成功,则光子飞行时间t=n+4-p,其中n+4为接收到第一个光子的时间,p为发出第一个光脉冲的时间,进而目标距离d=t/2*3*108m/s。
30.之所以用无光计数值=10*单光子探测器暗计数这一界限来区分是否时序匹配成功,是因为当收光模块接收到的单光子信号与窄脉冲激光器发出的光脉冲信号对位错误时,无光计数值通常是远高于10*单光子探测器暗计数的,通常为10*10*单光子探测器暗计数,如图4所示,其中虚线表示暗计数计数值,实线表示无光计数值,只有对位正确的情况下,无光计数值才接近暗计数计数值,因此本实施例中k取10也仅为一个示例,并未唯一选择值,并且k的取值还与窄脉冲激光器发出的光脉冲数量存在线性关系,光脉冲数量越大,k值可以相应放宽。
31.假设收光模块接收到的第一个光子(数字序列b的第一个数字1)的后移次数达到移动阈值,时序匹配仍然未成功,则将收光模块接收到的第二个光子(数字序列b的第二个数字1)与数字序列a的第一个数字1对位,继续进行比较统计,以此类推。
32.假设当收光模块接收到的第q个光子(位置信息n+v)与光脉冲信号的第一个光脉冲对位时,时序匹配成功,则光子飞行时间t=n+v-1。
33.显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域及相关领域的普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1