检查设备的自主检查方法、装置和电子设备与流程
本申请涉及安检,具体涉及一种检查设备的自主检查方法、装置、设备、介质和程序产品。
背景技术:
1、目前,货物、集装箱或装载有货物或集装箱的车辆作为被检物停放在检查场地(例如港口堆场)内后,通常通过人工判断被检物的位置、或是将被检物停放在指定的位置再进行集中扫描检查,检查设备无法自动获取检查场地内被检物的位置并自动对被检物进行查验,智能化程度较低,在检查区域较大、被检物较为分散的情况下,扫描效率较低且需要耗费大量人工成本。
技术实现思路
1、本申请旨在至少解决现有技术中存在的技术问题之一。
2、例如,本申请的检查设备可对检查区域内是否存在被检物实施自动排查,并在确定存在被检物时,实现对被检物的自主检查,全过程无需人员参与,节省人工成本。
3、为了达到上述目的,本申请的第一个方面提供了检查设备的自主检查方法,所述检查设备可移动地设置在检查区域内,所述检查区域内包括多个扫描通道,所述方法包括以下步骤:
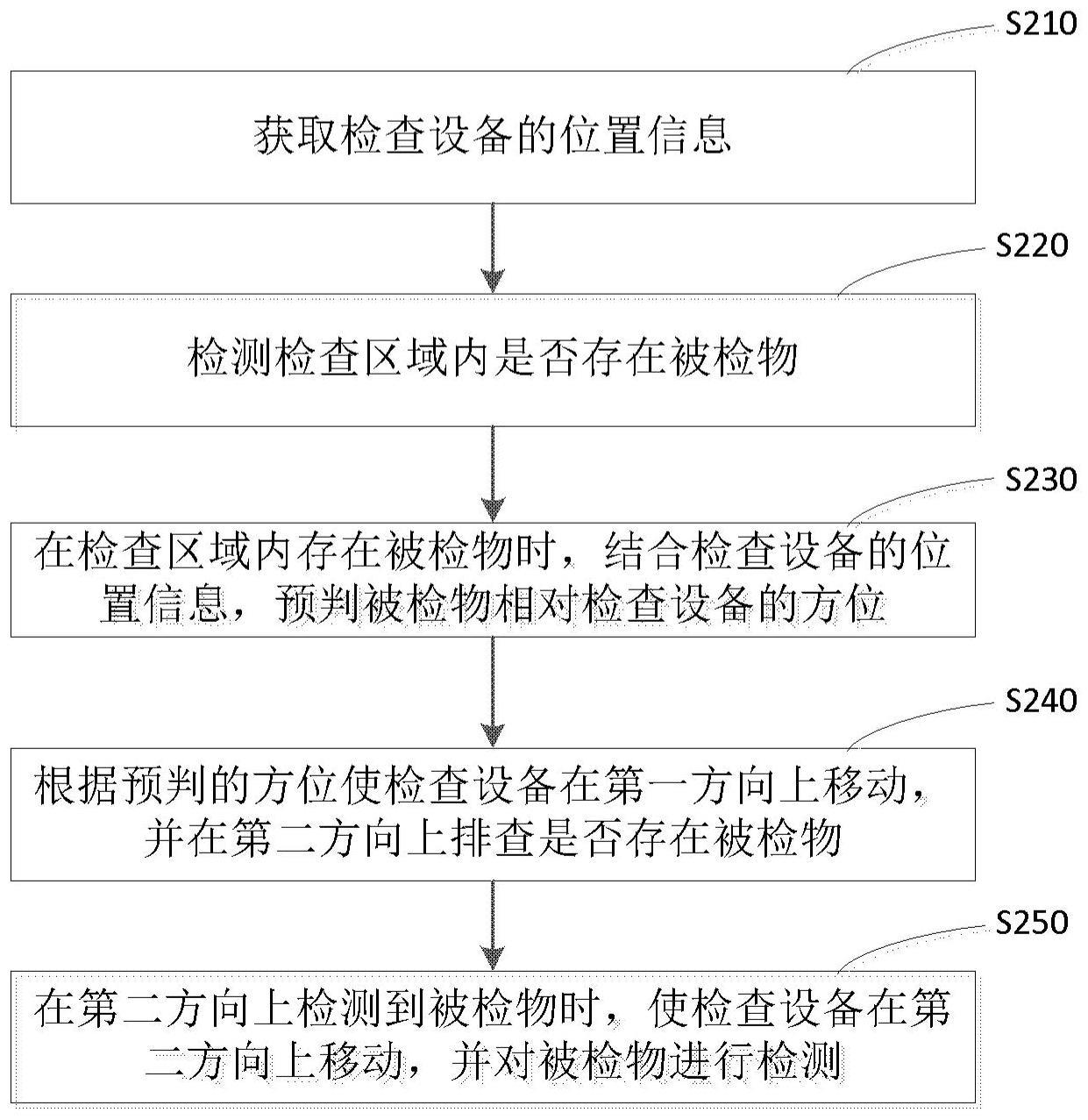
4、获取所述检查设备的位置信息;
5、检测所述检查区域内是否存在被检物;
6、在所述检查区域内存在被检物时,结合所述检查设备的位置信息,预判所述被检物相对所述检查设备的方位;
7、根据预判的方位使所述检查设备在第一方向上移动,并在第二方向上排查是否存在被检物,其中,所述第二方向与所述扫描通道的延伸方向相同;以及
8、在第二方向上检测到被检物时,使所述检查设备在第二方向上移动,并对所述被检物进行检查。
9、根据本申请的自主检查方法,通过先预判被检物在检查区域内的方位,再根据预判方位自动导向并对被检物进行精确定位,实现检查设备在检查区域内的智能定位和扫描工作,提高了被检物的查验效率,减少人工操作流程及人工成本,为实现无人化智能查验提供一种解决方案。
10、进一步地,在检测所述检查区域内是否存在被检物之前,所述自主检查方法还包括:
11、根据所述检查区域的覆盖面积建立拓扑地图;
12、为每个扫描通道的两端设置节点,所述节点用于指引所述检查设备的移动路径。
13、进一步地,检测所述检查区域内是否存在被检物,包括:
14、通过所述检查设备上的第一激光雷达装置对所述检查区域进行扫描,所述第一激光雷达装置构造为多线激光发射器;
15、在扫描范围内存在遮挡物时,所述检查区域内存在被检物。
16、进一步地,在所述检查区域内存在被检物时,结合所述检查设备的位置信息,预判所述被检物相对所述检查设备的方位,包括:
17、通过被遮挡物遮挡的方位,确认所述被检物相对于所述检查设备的方位;
18、根据所述检查设备的位置信息,读取所述方位内所有的扫描通道;
19、获取所述方位内所有的扫描通道的节点。
20、进一步地,根据预判的方位使所述检查设备在第一方向上移动,并在第二方向上排查是否存在被检物,包括:
21、逐一读取所述方位内所有的扫描通道的节点中,在所述检查设备第一方向上的第一目标节点;
22、根据所述第一目标节点控制所述检查设备在第一方向上移动;
23、通过所述检查设备上的第二激光雷达装置排查所述扫描通道内是否存在被检物。
24、进一步地,在第二方向上检测到被检物时,使所述检查设备在第二方向上移动,并对所述被检物进行检查,包括:
25、在所述扫描通道内检测到被检物时,获取在所述检查设备第二方向上的第二目标节点;
26、根据所述第二目标节点控制所述检查设备在第二方向上移动,并对所述被检物进行检查。
27、进一步地,在所述检查设备在第二方向上移动之前或在第二方向上移动时,所述方法还包括:
28、根据所述检查设备的偏移距离调整所述检查设备的车轮角度,其中,所述偏移距离是由所述扫描通道两端的节点相连的基准线与所述检查设备的当前位置信息计算得到的。
29、进一步地,所述方法还包括:
30、通过所述检查设备上的第三激光雷达装置测量所述被检物的宽度;
31、通过所述检查设备上的第四激光雷达装置测量所述被检物的高度;
32、在所述被检物的宽度和/或所述被检物的高度超过预设尺寸时,所述检查设备退回到所述被检物所在的扫描通道的节点。
33、进一步地,所述拓扑地图内还包括停车点,所述停车点用于所述检查设备的停放。
34、本申请的第二方面提供了检查设备的自主检查装置,所述检查设备可移动地设置在检查区域内,包括:获取模块,所述获取模块用于获取所述检查设备的位置信息;检测模块,所述检测模块用于检测所述检查区域内是否存在被检物;预判模块,所述预判模块用于:在所述检查区域内存在被检物时,结合所述检查设备的位置信息,预判所述被检物相对所述检查设备的方位;排查模块,所述排查模块用于:根据预判的方位使所述检查设备在第一方向上移动,并在第二方向上排查是否存在被检物;以及移动模块,所述移动模块用于:在第二方向上检测到被检物时,使所述检查设备在第二方向上移动,并对所述被检物进行检查。
35、本申请的第三方面提供了一种电子设备,包括:一个或多个处理器;存储器,用于存储一个或多个程序,其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得一个或多个处理器执行上述自主检查方法。
36、本申请的第四方面还提供了一种计算机可读存储介质,其上存储有可执行指令,该指令被处理器执行时使处理器执行上述自主检查方法。
37、本申请的第五方面还提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述自主检查方法。
技术特征:
1.一种检查设备的自主检查方法,其特征在于,所述检查设备可移动地设置在检查区域内,所述检查区域内包括多个扫描通道,所述方法包括以下步骤:
2.根据权利要求1所述的自主检查方法,其特征在于,在检测所述检查区域内是否存在被检物之前,所述自主检查方法还包括:
3.根据权利要求2所述的自主检查方法,其特征在于,检测所述检查区域内是否存在被检物,包括:
4.根据权利要求3所述的自主检查方法,其特征在于,在所述检查区域内存在被检物时,结合所述检查设备的位置信息,预判所述被检物相对所述检查设备的方位,包括:
5.根据权利要求4所述的自主检查方法,其特征在于,根据预判的方位使所述检查设备在第一方向上移动,并在第二方向上排查是否存在被检物,包括:
6.根据权利要求5所述的自主检查方法,其特征在于,在第二方向上检测到被检物时,使所述检查设备在第二方向上移动,并对所述被检物进行检查,包括:
7.根据权利要求6所述的自主检查方法,其特征在于,在所述检查设备在第二方向上移动之前或在第二方向上移动时,所述方法还包括:
8.根据权利要求1所述的自主检查方法,其特征在于,所述方法还包括:
9.根据权利要求2所述的自主检查方法,其特征在于,所述拓扑地图内还包括停车点,所述停车点用于所述检查设备的停放。
10.一种检查设备的自主检查装置,所述检查设备可移动地设置在检查区域内,其特征在于,包括:
11.一种电子设备,包括:
12.一种计算机可读存储介质,其上存储有可执行指令,该指令被处理器执行时使处理器执行根据权利要求1~9中任一项所述的自主检查方法。
13.一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现根据权利要求1~9中任一项所述的自主检查方法。
技术总结
本申请提供了一种检查设备的自主检查方法,包括以下步骤:获取检查设备的位置信息;检测检查区域内是否存在被检物;在检查区域内存在被检物时,结合检查设备的位置信息,预判被检物相对检查设备的方位;根据预判的方位使检查设备在第一方向上移动,并在第二方向上排查是否存在被检物;在第二方向上检测到被检物时,使检查设备在第二方向上移动,并对被检物进行检查。根据本申请的自主检查方法,通过先预判被检物在检查区域内的方位,再根据预判方位自动导向并对被检物进行精确定位,实现检查设备在检查区域内的智能定位和扫描工作,提高了被检物的查验效率,减少人工操作流程及人工成本,为实现无人化智能查验提供一种解决方案。
技术研发人员:李建,王永明,袁新,朱新波,冉占森,倪秀琳
受保护的技术使用者:同方威视技术股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!