近地表速度反演建模方法及装置与流程
本发明属于石油地球物理勘探,涉及一种近地表速度反演建模方法及装置。
背景技术:
1、随着地震勘探的不断深入,双复杂区域已成为油气勘探开发的重点攻关区域之一,但是其勘探难度远远高于常规勘探。双复杂区域地表起伏剧烈,速度横向变化快,并且通常地下构造发育复杂,地层产状变化大,这些地质条件给高精度速度建模及成像带来很大困难。传统基于基准面(水平基准面或是浮动基准面)的速度建模与偏移成像方法,因为与真实的起伏地表差异较大,或通过常速替换速度转换到深度域后物理意义不再明确,不符合实际地表变化特征,会引入速度和成像误差。因此,随着地震资料处理对分辨率要求的提高,对近地表速度的需求日益提高。
2、准确的近地表速度模型,可以用来计算静校正量,为全波形反演提供近地表的低频信息,也可以提高叠前深度偏移的成像精度。传统的近地表速度反演建模方法,主要有基于折射波原理的折射建模和基于射线的初至走时网格层析反演建模。前者因为假设不成立对复杂地区不适用,后者因为需要准确的射线追踪和射线分布不均匀等原因存在效率和效果问题。基于此,为解决复杂近地表区的静校正以及叠前深度偏移的成像精度问题,探索新的、更有效的近地表速度反演建模方法尤为重要。
技术实现思路
1、本发明的目的,是要提供一种近地表速度反演建模方法,在地震勘探资料采集后,拾取叠前炮集的初至走时,对每一炮集为单位进行速度反演,然后获得每一炮集有效的反演结果,最后加权插值深度域速度场,得到最终近地表速度模型;
2、本发明的另一个目的,是要提供一种近地表速度反演建模方装置。
3、本发明为实现上述目的,所采用的技术方案如下:
4、一种近地表速度反演建模方法,包括以下步骤:
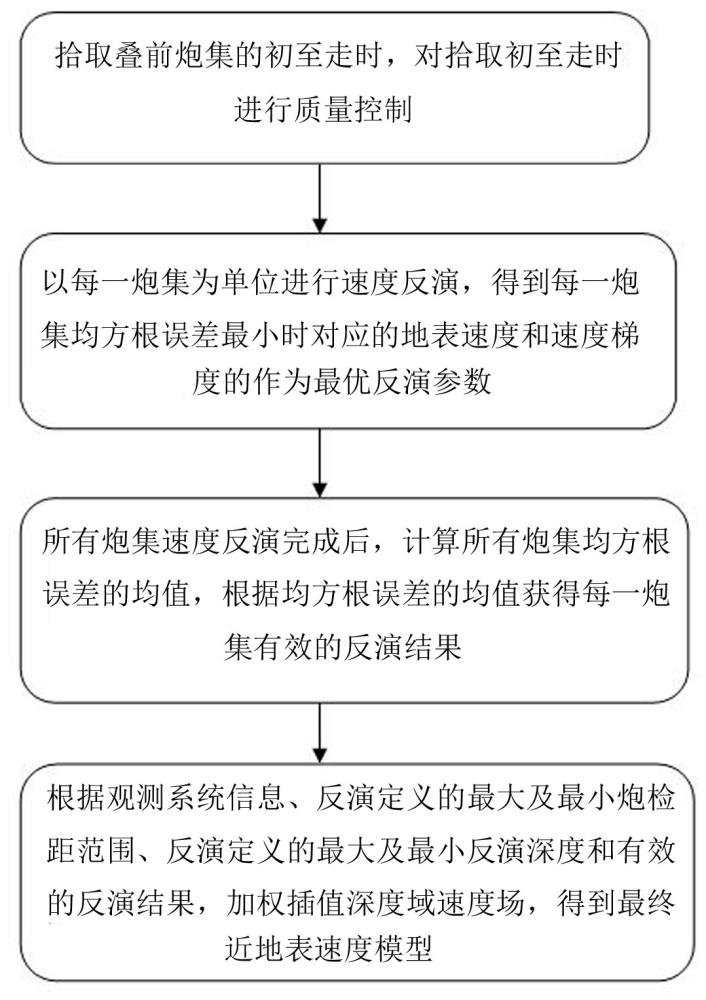
5、s1、拾取叠前炮集的初至走时,对拾取初至走时进行质量控制;
6、s2、以每一炮集为单位进行速度反演,得到每一炮集均方根误差最小时对应的地表速度和速度梯度的作为最优反演参数;
7、s3、所有炮集速度反演完成后,计算所有炮集均方根误差的均值,根据均方根误差的均值获得每一炮集有效的反演结果;
8、s4、根据观测系统信息、反演定义的最大及最小炮检距范围、反演定义的最大及最小反演深度和有效的反演结果,加权插值深度域速度场,得到最终近地表速度模型。
9、作为限定,步骤s1的过程具体包括:
10、s11、激发地震波并记录地震波,获取纵波地震数据;
11、s12、观测系统定义完成后,以炮集为单位进行初至走时拾取;
12、s13、对拾取初至走时进行质量控制。
13、作为第二种限定,所步骤s2的过程具体包括:
14、s21、利用每一炮集的炮点和检波点坐标信息,线性拟合计算得到该炮集的地表倾角;
15、s22、根据地表倾角,利用坐标旋转变换公式对该炮集的炮点和检波点的坐标进行旋转变换;
16、s23、确定每一炮集地表速度的上界、下界和速度扫描间隔共同组成地表速度三元组,计算扫描速度数;
17、s24、确定每一炮集速度梯度的上界、下界和速度扫描间隔共同组成速度梯度三元组,计算扫描速度梯度数;
18、s25、根据扫描速度数、扫描速度梯度数,遍历每一炮集地表速度和速度梯度,得到该炮集均方根误差最小时对应的地表速度和速度梯度的作为最优反演参数。
19、作为进一步限定,步骤s22中,坐标旋转变换公式为:
20、
21、其中,x’,y’表示炮点或检波点的坐标,x,y表示炮点或检波点的坐标旋转后的横坐标,θ表示炮集的地表倾角。
22、作为再进一步限定,步骤s23中,遍历每一炮集地表速度和速度梯度的过程具体包括:
23、根据旋转变换后炮集的炮点和检波点的坐标,计算每一炮集的每对炮点、检波点的理论初至走时;根据扫描速度数、扫描速度梯度数,计算理论初至走时和拾取初至走时的误差并求平方,累积所有道的平方误差,计算其均方根误差,得到该炮集均方根误差最小时对应的地表速度和速度梯度的作为最优反演参数;
24、所述理论初至走时的计算公式为:
25、
26、k=v0β;
27、其中,tcalc为理论初至走时,v0为炮集的地表速度,k为炮集的速度梯度,β为速度随深度的相对变化率,x1为检波点到炮点的水平距离,z1为检波点到炮点的垂向距离。
28、作为更进一步限定,步骤s3的过程具体包括:
29、s31、根据步骤s2,所有炮集速度反演完成后,计算所有炮集均方根误差的均值,当某一炮集的均方根误差小于或等于设定的误差条件时,获得该炮集的反演结果;当某一炮集的均方根误差大于设定的误差条件时,标记该炮集反演结果为待处理参数;
30、s32、检查待处理参数的炮集的拾取初至走时,若有异常,则剔除异常拾取初至走时后按步骤s2重新进行速度反演;若新的均方根误差满足误差条件,则结束处理,获得该炮集的反演结果;
31、s33、判断所有炮集的反演结果是否符合要求,若符合,则得到所有炮集有效的反演结果;若不符合,则剔除不符合的炮集的反演结果,参考相临炮集的反演结果对该炮集进行线性插值,得到所有炮集有效的反演结果。
32、作为进一步限定,步骤s31中,所述误差条件为所有炮集均方根误差的均值的倍数。
33、作为再进一步限定,步骤s4的过程具体包括:
34、对每一炮集有效的反演结果定义权函数ω,根据观测系统信息、反演定义的最大、最小炮检距范围和反演定义的最大、最小反演深度,逐炮集利用有效的反演结果对深度域速度场进行插值计算,最后对每个速度网格点的速度值加权平均计算,得到最终近地表速度模型。
35、作为更进一步限定,对每一炮集有效的反演结果定义权函数ω,包括两种策略:
36、方式一,根据均方根误差的大小定义权值;
37、方式二,对每一炮集有效的反演结果定义等权值。
38、本发明还提供了所述的近地表速度反演建模方法的反演建模装置,包括:
39、初至数据准备模块,用于拾取叠前炮集的初至走时,对拾取初至走时进行;
40、分炮集反演处理模块,用于以每一炮集为单位进行速度反演,得到每一炮集均方根误差最小时对应的地表速度和速度梯度的作为最优反演参数;
41、反演结果处理模块,用于所有炮集速度反演完成后,计算所有炮集均方根误差的均值,根据均方根误差的均值获得每一炮集有效的反演结果;
42、近地表网格速度模型确定模块,用于根据观测系统信息、反演定义的最大及最小炮检距范围、反演定义的最大及最小反演深度和有效的反演结果,加权插值深度域速度场,得到最终近地表速度模型。
43、本发明由于采用了上述的技术方案,其与现有技术相比,所取得的技术进步在于:
44、(1)本发明在地震勘探资料采集后,拾取叠前炮集的初至走时,对每一炮集为单位进行速度反演,然后获得每一炮集有效的反演结果,最后加权插值深度域速度场,得到最终近地表速度模型;
45、(2)本发明所得近地表速度模型既可用于地震采集期间对近地表速度的初步建模和静校正量计算,也可以为网格层析反演和全波形反演的初始速度模型;
46、(3)本发明实用高效,提高了近地表反演的效率。
47、本发明属于石油地球物理勘探技术领域,用于近地表速度反演建模,提高静校正计算精度,也可用作网格层析反演或全波形反演的初始速度模型。
- 还没有人留言评论。精彩留言会获得点赞!