一种竖井三角联系高精度测量装置及测量方法与流程
1.本发明涉及竖井联系三角测量领域,尤其是涉及一种竖井三角联系高精度测量装置及测量方法。
背景技术:
2.根据《城市轨道交通工程测量规范》(gb/t 50308-2017)钢丝投点宜选用φ0.3
㎜
钢丝,投点中误差不应超过
±2㎜
;高程传递测量可采用悬挂钢尺法、电磁波测距三角高程法、水准测量法、电磁波测距法,传递高程时每次应独立观测3测回,测回间变动仪器高度,三测回测得地上、地下水准点间的高差较差应小于3mm。竖井三角联系测量主要的控制项目,就是将地面平面坐标和高程系统传递到地下,作为地下控制测量的依据,在传统的竖井三角联系测量平面坐标投点方法中有光学投点法、垂线投点法,高程导入有钢尺钢丝法、光电测距三角高程法。光学投点法精度受高差的影响,当超过一定的长度时,通过人眼是无法进行投点的;垂线投点法精度受外部环境影响很大,特别在竖井中环境等外部因素的影响;高程钢尺钢丝法导入环境等影响,光电测距三角高程导入,受仰俯角的影响,无法正常对准观测,传统的竖井三角联系测量因受工作环境的影响,造成测量精度低、测量人员劳动强度大、工作效率低,因此,需要一种简易、性价比高的一种竖井三角联系高精度测量控制方法。
3.中国专利文献cn114396915a记载了一种地下电力隧道工程高程测量方法,包括在隧道内布设n个隧道高程点并安置水准管,利用连通器原理,在各隧道高程点上均固定竖直水准管,每两相邻水准管间用连通水管紧密封闭连接,借助悬挂钢尺、直角三角尺完成高程点与水准管液面高差量算。但是该装置受风力、气流、滴水等影响,测量人员劳动强度大、工作效率低,使用存在缺陷,需要改进。
技术实现要素:
4.本发明提供了一种竖井三角联系高精度测量装置及测量方法,针对竖井三角联系测量可进行高程控制网、平面控制网传递以及竖井沉降位移监测,减少测量人员的劳动强度,提高了竖井三角联系测量的精度与工作效率;通过监测数据的处理分析,实时对井内的控制网进行复核、修正,从而保证了井内控制网的精度以及贯通精度。
5.为解决上述技术问题,本发明所采用的技术方案是:一种竖井三角联系高精度测量装置及测量方法,包括发射装置和接收装置,发射装置和接收装置分别安装在井壁的顶部和底部,发射装置包括能够水平校正的高精度激光发射器,高精度激光发射器上设有升降的棱镜头,接收装置包括能够水平调节的方管,方管上设有反射贴。
6.优选的方案中,发射装置还包括固定板,固定板安装在竖井井壁上,固定板一端通过第一伸缩杆和第二伸缩杆与井壁连接。
7.优选的方案中,固定板顶部设有对中盘,固定板上设有对中螺栓,对中盘上设有基座,对中螺栓贯穿对中盘与基座连接。
8.优选的方案中,基座上设有多个脚螺旋,基座顶部设有圆水准气泡和管水准气泡,
高精度激光发射器安装在基座上。
9.优选的方案中,高精度激光发射器一侧设有l型测钉,第五伸缩杆上设有第五伸缩杆,第五伸缩杆顶部设有棱镜头,棱镜头通过棱镜锁紧螺旋安装在第五伸缩杆上;l型测钉顶部与高精度激光发射器测距起点一致;高精度激光发射器与第五伸缩杆的轴线一致。
10.优选的方案中,接收装置还包括u型卡,u型卡上设有第三伸缩杆和第四伸缩杆,u型卡通过连接螺栓分别与第三伸缩杆和第四伸缩杆一端连接,第三伸缩杆和第四伸缩杆另一端安装在竖井底部,u型卡上设有固定螺栓。
11.优选的方案中,方管通过固定螺栓与u型卡连接,方管一侧设有第二圆水准气泡,方管顶部设有激光靶。
12.优选的方案中,反射贴上设有刻度,激光靶上设有十字丝。
13.优选的方案中,反射贴底部中心点设有卡槽,竖井底部设有测钉,卡槽与竖井的测钉连接。
14.一种竖井三角联系高精度测量方法,其特征是:s1、安装接收装置:将u型卡与反射贴固定好,将卡槽与竖井的测钉连接;s2、反射贴调平:通过调整第三伸缩杆和第四伸缩杆的长度,以使第二圆水准气泡水平;s3、安装发射装置:将固定板、第一伸缩杆、第二伸缩杆与竖井上的预埋件安装好,高精度激光发射器通过对中螺栓与对中盘连接;s4、基座调平:高精度激光发射器对中井底激光靶中心点发射激光,通过调整第一伸缩杆和第二伸缩杆初平调节;通过调整多个脚螺旋,以使圆水准气泡和管水准气泡水平,达到精准调平;s5、安装棱镜头测量:在高精度激光发射器顶部安装棱镜头;测量发射装置水平角β、水平距离l和测尺读数a,得到发射装置上的平面坐标及高程;测出l型测钉到激光靶距离b、激光靶到竖井底部测钉距离c;得到竖井底部测钉的平面坐标及高程。
15.本发明的有益效果为:本发明解决了传统竖井三角联系测量的精度不高,解决了因在井边作业危险问题、悬吊钢丝易晃动问题,还解决了因受风力、气流、滴水、角度因素的影响,测量作业效率低问题。
16.本装置不仅是针对竖井三角联系测量进行高程控制网、平面控制网传递,同时还可以对竖井的沉降位移进行监测,减少测量人员的劳动强度,提高了竖井三角联系测量的精度与工作效率;通过监测数据的处理分析,实时对井内的控制网进行复核、修正,从而保证了井内控制网的精度以及贯通精度。
17.本发明在100米内时,平面坐标投点精度和高程传递与传统的精度相比,在规范允许范围内。本发明优点在于操作简单,省时省力,利用激光投点解决传统钢丝投点的繁琐、成本高问题,在0-100米内其投点精度高于传统钢丝投点精度。本发明不仅是针对竖井三角联系测量进行高程控制网、平面控制网传递,同时还可以对竖井的沉降位移进行监测,提高测量工作效率70%。通过监测数据的处理分析,实时对井内的控制网进行复核、修正,从而
保证了井内控制网的精度以及贯通精度,通过比较贯通精度能够提高3-5cm,具有较大的推广价值。
附图说明
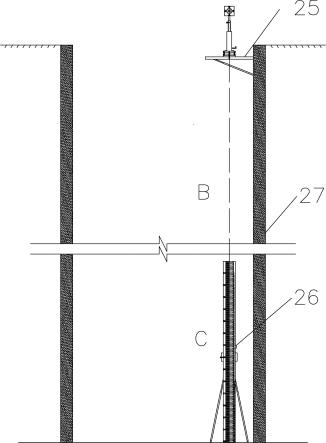
18.下面结合附图和实施例对本发明作进一步说明;图1是本发明安装在竖井上整体结构的正视图;图2是本发明射装置的结构示意图;图3是本发明发射装置分离结构示意图;图4是本发明接收装置结构示意图;图5是本发明接收装置分离结构示意图;图中:第一伸缩杆1;第二伸缩杆2;固定板3;对中盘4;对中螺栓5;基座6;脚螺旋7;圆水准气泡8;管水准气泡9;高精度激光发射器10;l型测钉11;第五伸缩杆12;棱镜锁紧螺旋13;棱镜头14;方管15;反射贴16;刻度1601;卡槽17;u型卡18;连接螺栓19;第二圆水准气泡20;激光靶21;十字丝2101;固定螺栓22;第三伸缩杆23;第四伸缩杆24;发射装置25;接收装置26;竖井27。
具体实施方式
19.实施例1:如图1-5中,一种竖井三角联系高精度测量装置及测量方法,包括发射装置25和接收装置26,发射装置25和接收装置26分别安装在井壁27的顶部和底部,发射装置25包括能够水平校正的高精度激光发射器10,高精度激光发射器10上设有升降的棱镜头14,接收装置26包括能够水平调节的方管15,方管15上设有反射贴16。由此结构,本发明解决了传统竖井三角联系测量的精度不高,解决了因在井边作业危险问题、悬吊钢丝易晃动问题,还解决了因受风力、气流、滴水、角度因素的影响,测量作业效率低问题。
20.本装置不仅是针对竖井三角联系测量进行高程控制网、平面控制网传递,同时还可以对竖井的沉降位移进行监测,减少测量人员的劳动强度,提高了竖井三角联系测量的精度与工作效率;通过监测数据的处理分析,实时对井内的控制网进行复核、修正,从而保证了井内控制网的精度以及贯通精度。
21.本发明在100米内时,平面坐标投点精度和高程传递与传统的精度相比,在规范允许范围内。本发明优点在于操作简单,省时省力,利用激光投点解决传统钢丝投点的繁琐、成本高问题,在0-100米内其投点精度高于传统钢丝投点精度。本发明不仅是针对竖井三角联系测量进行高程控制网、平面控制网传递,同时还可以对竖井的沉降位移进行监测,提高测量工作效率70%。通过监测数据的处理分析,实时对井内的控制网进行复核、修正,从而保证了井内控制网的精度以及贯通精度,通过比较贯通精度能够提高3-5cm。
22.优选的方案中,发射装置25还包括固定板3,固定板3安装在竖井27井壁上,固定板3一端通过第一伸缩杆1和第二伸缩杆2与井壁27连接。由此结构,发射装置25通过第一伸缩杆1和第二伸缩杆2初步调节,多个脚螺旋7精度调节,操作简单,省时省力,不用悬挂钢丝,避免了井边作业危险问题、悬吊钢丝易晃动问题,同时发射装置25通过高精度激光发射器10进行测量,减少测量人员的劳动强度,极大的提高了测量精度及贯通精度。同时通过发射
装置25发射激光,接收装置26接收激光,能够起到对竖井的沉降位移进行监测的作用。
23.优选的方案中,固定板3顶部设有对中盘4,固定板3上设有对中螺栓5,对中盘4上设有基座6,对中螺栓5贯穿对中盘4与基座6连接。由此结构,固定板3通过对中螺栓5与基座6连接,基座6通过多个脚螺旋7对高精度激光发射器10水平调节。
24.第一伸缩杆1和第二伸缩杆2均为铝合金材质。第一伸缩杆1和第二伸缩杆2均由两段直径大小不同的铝合金管组合而成。
25.优选的方案中,基座6上设有多个脚螺旋7,基座6顶部设有圆水准气泡8和管水准气泡9,高精度激光发射器10安装在基座6上。由此结构,高精度激光发射器10包括有显示屏和相应的应用按键,如开关机键、测距键、光束大小调节键。显示屏中可显示测量距离长度,光束大小。
26.优选的方案中,高精度激光发射器10一侧设有l型测钉11,第五伸缩杆12上设有第五伸缩杆12,第五伸缩杆12顶部设有棱镜头14,棱镜头14通过棱镜锁紧螺旋13安装在第五伸缩杆12上;l型测钉11顶部与高精度激光发射器10测距起点一致;高精度激光发射器10与第五伸缩杆12的轴线一致。由此结构,型测钉11顶部与高精度激光发射器10测距起点一致,高精度激光发射器10可以进行高程的测量,高精度激光发射器10顶部的棱镜头14可以进行平面坐标测量。
27.优选的方案中,接收装置26还包括u型卡18,u型卡18上设有第三伸缩杆23和第四伸缩杆24,u型卡18通过连接螺栓19分别与第三伸缩杆23和第四伸缩杆24一端连接,第三伸缩杆23和第四伸缩杆24另一端安装在竖井27底部,u型卡18上设有固定螺栓22。由此结构,u型卡18连接处留有螺旋栓孔,通过连接螺栓19与第三伸缩杆23和第四伸缩杆24连接。
28.优选的方案中,方管15通过固定螺栓22与u型卡18连接,方管15一侧设有第二圆水准气泡20,方管15顶部设有激光靶21。由此结构,方管15铝合金材质,反射贴16居中贴在方管15上,第二圆水准气泡20焊接在方管15中间侧部。在焊接第二圆水准气泡20时,必须保证第二圆水准气泡20水平居中。
29.优选的方案中,反射贴16上设有刻度1601,激光靶21上设有十字丝2101。由此结构,激光靶21的十字丝2101上设有刻度,十字丝2101的刻度是为了让发射装置25与接收装置26更好的对中,提高测量精度。
30.优选的方案中,反射贴16底部中心点设有卡槽17,竖井27底部设有测钉,卡槽17与竖井27的测钉连接。由此结构,反射贴16底部中心点的卡槽17是为了让反射贴16更好的与测钉对中。
31.实施例2:结合实施例1进一步说明:一种竖井三角联系高精度装置的测量方法,安装接收装置26:将u型卡18与反射贴16固定好,将卡槽17与竖井27的测钉连接;反射贴16调平:通过调整第三伸缩杆23和第四伸缩杆24的长度,以使第二圆水准气泡20水平;安装发射装置25:将固定板3、第一伸缩杆1、第二伸缩杆2与竖井27上的预埋件安装好,高精度激光发射器10通过对中螺栓5与对中盘4连接;基座6调平:高精度激光发射器10对中井底激光靶21中心点发射激光,通过调整第一伸缩杆1和第二伸缩杆2初平调节;通
过调整多个脚螺旋7,以使圆水准气泡8和管水准气泡9水平,达到精准调平;安装棱镜头14测量:在高精度激光发射器10顶部安装棱镜头14;测量发射装置25水平角β、水平距离l和测尺读数a,得到发射装置25上的平面坐标及高程;经过控制测量平差计算得到发射装置上的平面坐标及高程。
32.测出l型测钉11到激光靶21距离b、激光靶21到竖井27底部测钉距离c;经过控制测量平差计算即可得到井底测钉的平面坐标和高程。得到竖井27底部测钉的平面坐标及高程。
33.本发明高精度激光发射器10投点精度:k为(1/4500-1/200000),向井下深度为l米投点的投点误差为:m=
±k×
(l
×
10
³
)
㎜
,垂准精度k为1/200000,当深度l=100米时,投点误差m为0.5
㎜
;高精度激光发射器(10)测距精度为0.6+1ppm,测距中误差为m=(a+b
×
d)
㎜
,当距离d=100米时,测距中误差为0.7
㎜
。
34.上述的实施例仅为本发明的优选技术方案,而不应视为对于本发明的限制,本发明的保护范围应以权利要求记载的技术方案,包括权利要求记载的技术方案中技术特征的等同替换方案为保护范围。即在此范围内的等同替换改进,也在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1