视觉检测装置及方法与流程
1.本公开涉及面板检测技术领域,尤其涉及一种视觉检测装置及方法。
背景技术:
2.随着新能源发展、消费电子类产品种类增加,手机触摸屏、穿戴类触摸屏以及车载屏的需求也大量增加。面板行业在触摸屏的制造工艺中,在前端部分的cog(chip on glass,玻璃载芯片)工艺和fog(fpcb on glass,玻璃载柔性线路板)工艺,即ic(integrated circuit,集成电路)搭载在玻璃面板的工艺和fpcb(flexible printed circuit board,柔性线路板)搭载在玻璃面板的工艺,均需通过acf(anisotropic conductive film,异方性导电胶膜)的加热、加压,使ic(integrated circuit,集成电路)、fpcb与玻璃基板电极之间导通,而触摸屏质量优劣取决于acf导电粒子的压合状态。
3.因此,屏幕出厂前,需要对生产质量进行检测。acf导电粒子常见的粒径范围在3微米~5微米之间,以及屏幕的加工生产、装配过程中,均可能出现误差,从而影响屏幕的平整度。传统的acf导电粒子检测设备忽略了屏幕平整度的问题,对于存在不同平整度的屏幕来说,采用同一检测方式,检测时易导致粒子检效果不明显,进而造成局部虚焦,影响acf导电粒子的检测质量。
技术实现要素:
4.为解决现有技术中存在的至少以上技术问题,本公开实施例提供了一种视觉检测装置及方法。
5.本公开实施例一方面提供一种视觉检测装置,包括检测组件和移动组件;所述检测组件包括异物检测单元、位移传感器及z轴滑块板,所述异物检测单元及所述位移传感器设于所述z轴滑块板上,所述异物检测单元用于获取所述待测产品的导电粒子图像信息,所述位移传感器用于实时获取与待测产品间的距离信息;所述移动组件包括z轴补偿单元,所述z轴补偿单元与所述z轴滑块板连接,所述z轴补偿单元用于根据所述距离信息驱动所述z轴滑块板沿z轴方向移动,以调节补偿所述检测组件与所述待测产品之间的距离差。
6.在一些实施例中,所述检测组件还包括外观检测单元;所述外观检测单元设于所述z轴滑块板上,并用于获取所述待测产品的集成电路图像信息。
7.在一些实施例中,所述异物检测单元包括粒子检测相机和对位相机;所述粒子检测相机和所述对位相机设于所述z轴滑块板上,并且所述粒子检测相机、所述对位相机和所述位移传感器的圆心位于同一直线。
8.在一些实施例中,所述外观检测单元包括电路检测相机和支撑结构;所述电路检测相机通过所述支撑结构与所述z轴滑块板连接,以及所述电路检测相机与所述粒子检测相机沿z轴同心设置。
9.在一些实施例中,所述z轴补偿单元包括第一伺服电机、电机安装板、丝杠及与所述丝杠连接的固定座;所述第一伺服电机与所述电机安装板连接,所述丝杠沿z轴方向设
置,所述固定座与所述z轴滑块板连接;所述第一伺服电机驱动所述丝杠转动,所述丝杠用于带动所述固定座及所述z轴滑块板沿z轴移动。
10.在一些实施例中,所述移动组件还包括x轴扫描单元;所述x轴扫描单元包括沿x轴方向设置的第一滑轨及设于所述第一滑轨上的第一滑块,所述第一滑块连接第一驱动电机,所述第一驱动电机用于驱动所述第一滑块沿所述第一滑轨在x轴方向滑动;所述第一滑块与所述电机安装板固定连接。
11.在一些实施例中,还包括载台组件;所述载台组件包括用于承载所述待测产品的检测载台,所述检测组件和所述移动组件位于所述检测载台的一侧。
12.在一些实施例中,还包括输送组件;所述输送组件与所述载台组件连接,并用于驱动所述载台组件移动。
13.在一些实施例中,所述检测装置用于检测触摸屏、电容屏、电阻屏、液晶屏、平板电脑、手机屏所使用的异方性导电胶膜。
14.在一些实施例中,所述检测载台包括载台、托板、支撑块及定位单元;所述载台呈长方体形,所述载台的边缘分别通过支撑块与的呈条形所述托板连接,多条所述托板形成承载面,所述定位单元设于所述载台表面;所述定位单元包括第一定位块和第二定位块,所述第一定位块和所述第二定位块分别用于限位所述待测产品的长边和宽边。
15.在一些实施例中,所述检测组件还包括吸附单元;所述吸附单元包括设于所述载台上的吸附口和真空驱动结构,所述吸附口与所述真空驱动结构连接,所述真空驱动结构提供真空环境用于吸附所述载台上的所述待测产品。
16.在一些实施例中,所述输送组件包括y轴输送单元;所述y轴输送单元包括沿y轴方向设置的第二滑轨及设于所述第二滑轨上的第二滑块,所述第二滑块连接第二驱动电机,所述第二驱动电机用于驱动所述第二滑块沿所述第二滑轨在y轴方向滑动;所述第二滑块与所述载台组件连接。
17.在一些实施例中,所述输送组件还包括θ轴旋转单元,所述第二滑块通过所述θ轴旋转单元与所述载台组件连接;所述θ轴旋转单元包括第二伺服电机和谐波减速机,所述第二伺服电机与所述载台通过所述谐波减速机连接,所述第二伺服电机驱动所述载台旋转用于调节所述待测产品的角度。
18.本公开实施例另一方面提供一种视觉检测方法,所述方法包括:获取检测组件的检测端与待测产品间的距离信息;对比所述距离信息和预设距离,并确定所述距离信息与所述预设距离沿z轴方向的距离差;根据所述距离差发送驱动信号,通过z轴补偿单元驱动所述检测组件沿z轴方向移动,以消除所述距离差。
19.在一些实施例中,所述检测组件包括异物检测单元和外观检测单元,所述方法还包括:通过z轴补偿单元驱动所述异物检测单元和所述外观检测单元沿z轴方向移动,以使所述异物检测单元和所述外观检测单元与所述待测产品保持相同距离。
20.在一些实施例中,所述检测组件还包括位移传感器,所述方法还包括:通过所述位移传感器实时获取与所述待测产品间的距离信息,以通过所述z轴补偿单元驱动所述检测组件沿z轴方向实时移动,并实时消除所述距离差。
21.在一些实施例中,所述获取检测组件的检测端与待测产品间的距离信息步骤前,所述方法还包括:确定所述检测组件的检测边缘和所述检测组件的移动角度;使所述检测
组件位于所述检测边缘中,以所述移动角度移动。
22.本公开实施例提供的一种视觉检测装置及方法,可用于包括但不限于触摸屏、电容屏、电阻屏、液晶屏、平板电脑、手机屏等在绑定的工艺中所要用到的异方性导电胶膜的导电粒子异物检测及集成电路外观检测;检测过程中,可对检测组件实现z轴方向的补偿,即通过位移传感器实时检测检测组件与待测产品的间距,当距离改变(增大或减小)时,通过z轴运动补偿的方式使距离保持在固定状态。基于此,即便待测产品存在加工误差和装配误差的情况,通过z轴的实时补偿调整,仍可保持在同一检测距离,保证了成像质量和检测效果。
附图说明
23.通过参考附图阅读下文的详细描述,本公开示例性实施方式的上述以及其他目的、特征和优点将变得易于理解。在附图中,以示例性而非限制性的方式示出了本公开的若干实施方式,其中:
24.在附图中,相同或对应的标号表示相同或对应的部分。
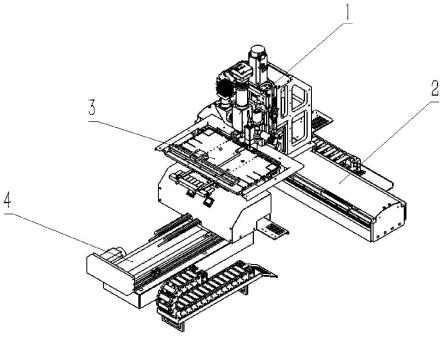
25.图1为本公开实施例提供的视觉检测装置的整体结构图;
26.图2为本公开实施例提供的视觉检测装置中检测组件的示意图;
27.图3为本公开实施例提供的视觉检测装置中移动组件的示意图;
28.图4为本公开实施例提供的视觉检测装置中载台组件的示意图;
29.图5为本公开实施例提供的视觉检测装置中输送组件的示意图;
30.图6为本公开实施例提供的视觉检测装置中异物检测单元的示意图;
31.图7为本公开实施例提供的视觉检测装置中外观检测单元的示意图;
32.图8为本公开实施例提供的视觉检测装置中z轴补偿单元的示意图;
33.图9为本公开实施例提供的视觉检测装置中x轴扫描单元的示意图;
34.图10为本公开实施例提供的视觉检测装置中检测载台的示意图;
35.图11为本公开实施例提供的视觉检测装置中吸附单元的示意图;
36.图12为本公开实施例提供的视觉检测装置中θ轴旋转单元的示意图;
37.图13为本公开实施例提供的视觉检测装置中y轴输送单元的示意图;
38.图14为本公开实施例提供的视觉检测方法的流程框图一;
39.图15为本公开实施例提供的视觉检测方法的流程框图二。
40.图中:
41.1:检测组件;2:移动组件;3:载台组件;4:输送组件;
42.11:异物检测单元;111:粒子检测模组;112:粒子检测相机固定板;113:z轴滑块板;114:对位相机模组;115:对位相机调整块;116:对位相机固定板;117:位移传感器固定板;118:粒子检测相机模组座板;119:位移传感器;1110:放大物镜;
43.12:外观检测单元;121:ic检测模组;122:ic相机固定板;123:ic镜头固定座;124:粒子检连接板;125:筋板;126:中间连接板;127:ic检连接板;128:ic相机调整块;129:位移台座板;1210:位移台;1211:ic镜头夹紧座;
44.21:z轴补偿单元;211:第一伺服电机;212:电机安装板;213:丝杠座板;214:导轨安装座;215:导轨压块;216:槽型光电安装座;217:槽型光电安装块;218:槽型光电传感器;
219:感应片;2110:滑块压块;2111:限位固定块;2112:限位胶柱;2113:直线导轨;2114:联轴器;2115:轴承固定座;2116:丝杠;2117:固定座;2118:防尘圈;2119:轴承固定座;2120:限位块;
45.22:x轴扫描单元;221:大理石底座直线电机;222:x轴拖链;223:x轴拖链移动端固定板;224:直线电子动子连接板;225:z轴筋板;226:加强轴;227:z轴连接板;228:z轴支撑板;229:x轴拖链行槽;
46.31:检测载台;311:载台;312:托板;313:支撑块;314:快速接头;315:x防静电定位块;316:定位块固定板;317:定位块固定块;318:y防静电定位块;
47.32:吸附单元;321:转台连接座;322:接头支撑杆;323:球阀开关;324:载台真空分流块;325:微管接头;326:感应钣金;327:转台限位胶垫;328:转台限位块;329:圆柱销;
48.41:θ轴旋转单元;411:减速机安装底板;412:谐波减速机;413:固定法兰;414:槽型光电传感器;415:载台立板;416:载台侧立板;417:第二伺服电机;418:载台限位胶垫;419:转台限位座;
49.42:y轴输送单元;421:大理石y轴模组底座;422:丝杠模组;423:螺旋管;424:塑料管夹;425:模组动子板;426:y轴拖链移动固定钣金;427:拖链行槽垫板;428:y轴拖链行槽;429:y轴拖链。
具体实施方式
50.为使本公开的目的、特征、优点能够更加的明显和易懂,下面将结合本公开实施例中的附图,对本公开实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本公开一部分实施例,而非全部实施例。基于本公开中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本公开保护的范围。
51.如图1所示,本公开实施例提供一种视觉检测装置,该装置包括检测组件1、移动组件2、载台组件3和输送组件4,检测组件1用于获取待测产品(如触摸屏、电容屏、电阻屏、液晶屏、平板电脑、手机屏等所使用的异方性导电胶膜)的检测信息,移动组件2用于驱动检测组件沿x轴向及z轴向运动,载台组件3用于承载待测产品,输送组件4用于驱动载台组件3沿y轴向及θ旋转向运动。以下对视觉检测装置的结构及功能进行具体描述。
52.在一些实施例中,检测组件1包括异物检测单元11、位移传感器119及z轴滑块板113,异物检测单元11及位移传感器119设于z轴滑块板113上,异物检测单元11用于获取待测产品的导电粒子图像信息,位移传感器119用于实时获取与待测产品间的距离信息。在进行异物检测时,待测产品的表面的平整度局部存在偏差,如因加工误差和装配误差导致的平整度偏差。本公开实施例中,通过实时获取距离信息,并通过z轴补偿的方式,消除该偏差,使异物检测单元11始终保持同一检测距离,进而保证了成像质量和检测效果。
53.例如,实时获取距离信息的方式包括设置位移传感器119,位于传感器119设置在异物检测单元11的前端,其实时获取位移传感器119与待测产品之间的垂直距离,其中,位于传感器119和异物检测单元11的位置均是固定的,因此,可实时确定异物检测单元11与待测产品之间的垂直距离,当前端检测到距离信息异常时,便可通过z轴补偿单元21进行运动补偿,以及时调整异物检测单元11与待测产品的间距。
54.本公开实施例中,获取的距离信息与设定的距离(所需保持的距离)对比包括三种
情况:一种是距离信息大于设定距离,此时异物检测单元11与待测产品的间距变大,需要z轴补偿单元21调整缩小间距;一种是距离信息小于设定距离,此时异物检测单元11与待测产品的间距变小,需要z轴补偿单元21调整增大间距;一种是距离信息等于设定距离,此时异物检测单元11与待测产品的间距无需改变。
55.如图6所示,示意了异物检测单元11的具体结构图,本公开实施例中,异物检测单元11包括粒子检测模组111、粒子检测相机固定板112、z轴滑块板113、对位相机模组114、对位相机调整块115、对位相机固定板116、位移传感器固定板117、粒子检测相机模组座板118、位移传感器119及放大物镜1110。
56.粒子检测模组111安装在粒子检测相机模组座板118上,包括粒子检测相机、镜头和放大物镜1110,镜头的一端通过粒子检测相机固定板112与粒子检测相机连接,另一端与放大物镜1110通过细螺纹连接;对位相机模组114安装在对位相机固定板116上,包括对位相机;位移传感器119安装在位移传感器固定板117上;其中,粒子检测相机、对位相机和位移传感器的圆心位于同一直线。对位相机固定板116、位移传感器固定板117、对位相机调整块115均通过紧固件安装在粒子检测相机模组座板118上,粒子检测相机模组座板118安装在z轴滑块板113上。
57.异物检测单元11使用时,检测组件1带动对位相机移动,对位相机与待测产品上的标定点进行定位,确定检测组件1的运动坐标,然后,检测组件1在坐标内沿设定的路径/行程移动,移动过程中,通过异物检测单元11获取待测产品的导电粒子图像信息。
58.本公开实施例中,移动组件2包括z轴补偿单元21,z轴补偿单元21与z轴滑块板113连接,z轴补偿单元21用于根据距离信息驱动z轴滑块板113沿z轴方向移动,以调节补偿检测组件1与待测产品之间的距离差。
59.z轴滑块板113可沿z轴方向升降,z轴滑块板113上的位移传感器119和对位相机模组114等可同步升降,进而使位移传感器119和对位相机模组114可沿z轴方向进行微调。其中,z轴补偿单元21为z轴滑块板113升降的驱动结构。
60.例如,如图8所示,示意了z轴补偿单元21的具体结构图,z轴补偿单元21包括第一伺服电机211、z轴电机安装板212、丝杠座板213、导轨安装座214、导轨压块215、槽型光电安装座216、槽型光电安装块217、槽型光电传感器218、感应片219、滑块压块2110、限位固定块2111、限位胶柱2112、直线导轨2113,联轴器2114、轴承固定座2115、丝杠2116、固定座2117、防尘圈2118、轴承固定座2119及限位块2120。
61.槽形光电传感器218安装在槽型光电安装块217上,槽型光电安装块217安装在槽型光电安装座216上,用于z轴滑块板113的位置检测;直线导轨2113安装在导轨安装座214上,并由导轨压块215保证导轨垂直精度,滑块压块2110保证滑块运动垂直精度;第一伺服电机211安装在z轴电机安装板212上,并通过联轴器2114与丝杠2116连接,采用定制紧配轴承固定座2115、轴承固定座2119及丝杠螺母固定座2117,进而保证z轴高精度运动。
62.使用时,通过丝杠螺母固定座2117与z轴滑块板113和/或直线导轨2113连接,通过丝杠2116驱动固定座2117沿z轴升降,进而实现检测组件1的z轴方向的微调。具体地,第一伺服电机211的输出轴与丝杠连接,输出轴的正转或反转,可同步丝杠的正转或反转,进而调节固定座2117沿丝杠轴向的升高或下降,第一伺服电机211接收控制器发送的驱动信号,该驱动信号控制第一伺服电机211的启动时长,通过启动时长确定丝杠转动的周数,进而调
节固定座2117的位置。控制器接收位移传感器119发送的距离信息,并根据该距离信息确定第一伺服电机211的启动时长。
63.如图2所示,本公开实施例中,检测组件1还包括外观检测单元12,其中,异物检测单元11用于获取待测产品的导电粒子图像信息,外观检测单元12用于获取待测产品的集成电路图像信息。外观检测单元12可与异物检测单元11同步沿z轴方向移动。
64.如图7所示,示出了外观检测单元7的具体结构,本公开实施例中,外观检测单元12包括ic检测模组121、ic相机固定板122、ic镜头固定座123、粒子检连接板124、筋板125、中间连接板126、ic检连接板127、ic相机调整块128、位移台座板129、位移台1210及ic镜头夹紧座1211。
65.ic检测模组121的电路检测相机安装在ic相机固定板122,ic检测模组121的镜头安装在ic镜头固定座123上,通过ic镜头夹紧座1211进行夹紧;其中,镜头处可进行360度旋转;中间连接板126与粒子检连接板124、ic检连接板127安装连接,通过筋板125加强连接;位移台1210安装在位移台座板129上;ic相机调整块128、位移台座板129安装在ic检连接板127上。
66.本公开实施例中,基于ic相机调整块128和位移台座板129可实现ic检测模组121在y轴方向的调节,通过中间连接板126与z轴滑块板113,进而在z轴补偿单元21的驱动下,可实现ic检测模组121在z轴方向进行微调。通过外观检测单元12获取的集成电路图像信息可判断待测产品的外观质量。
67.例如,在获取集成电路图像信息后,可通过人工识别的方式判断待测产品的外观是否合格,或者,例如,通过图像处理单元提取集成电路图像的特征点信息,并与预设的特征点信息进行对比,进而判断待测产品的外观是否合格。例如,特征点信息对比结果在设定的范围内,则判断ic的外观合格。
68.如图3所示,本公开实施例中,移动组件2还包括x轴扫描单元22,x轴扫描单元22与z轴补偿单元21连接,并用于驱动z轴补偿单元21沿x轴方向移动。
69.如图9所示,示出了z轴补偿单元21的具体结构,本公开实施例中,x轴扫描单元22包括大理石底座直线电机221、x轴拖链222、x轴拖链移动端固定板223、直线电子动子连接板224、z轴筋板225、加强轴226、z轴连接板227、z轴支撑板228及x轴拖链行槽229。其中,大理石底座直线电机221的壳体部分为第一滑轨,如,在大理石底座直线电机221的壳体上或者壳体的侧端设置条形轨道结构,大理石底座直线电机221为第一驱动电机,直线电子动子连接板224为第一滑块,直线电子动子连接板224能x轴方向滑动。
70.大理石底座直线电机221可保证x轴高精度平稳运动;x轴拖链222安装在x轴拖链行槽229上,x轴拖链移动端固定板223安装在直线电子动子连接板224上,直线电子动子连接板224安装在大理石底座直线电机221上,z轴筋板225与z轴连接板227、z轴支撑板228连接,通过加强轴226加强固定形成z轴固定架;z轴补偿单元21安装在z轴固定架上。
71.例如,z轴固定架上形成半包围的容置槽,z轴补偿单元21安装在该容置槽内,z轴补偿单元21随z轴固定架同步移动,进而实现对检测组件1在x轴方向的调节。
72.如图4所示,示意了载台组件3的具体结构,本公开实施例中,视觉检测装置还包括载台组件3,载台组件3用于放置承载待测产品,检测组件1位于载台组件3的上方/侧方,对载台组件3上的待测产品进行检测。其中,载台组件3包括检测载台31和吸附单元32。其中,
检测载台31起承载待测产品的作用,并通过吸附单元32对待测产品进行吸附固定。如图10所示,检测载台31包括载台311、托板312、支撑块313、快速接头314、x防静电定位块315、定位块固定板316、定位块固定块317及y防静电定位块318。
73.例如,托板312通过支撑块313与载台311连接。例如,托板312的材质为透明材质,外观检测的镜头可在托板312的底部,或者,托板312与载台311之间的间隙内完成集成电路的图像信息采集。
74.例如,x防静电定位块(第一定位块)315、定位块固定板316、定位块固定块317与y防静电定位块(第二定位块)318形成x轴方向、y轴方向的定位单元。例如,x防静电定位块315和y防静电定位块318上分别设置有用于限位待测产品的抵接面,并且x防静电定位块315和y防静电定位块318分别通过滑动结构与载台311滑动连接,例如,滑动结构为配合的滑槽及滑块等,本公开中对滑动结构不进行限定。
75.根据待测产品的产品尺寸,调整x防静电定位块315和y防静电定位块318的位置,使之限位的尺寸与待测产品相适配,待测产品上料时,将待测产品的一条边(长边)抵接在x防静电定位块315,另一条边(宽边)抵接在y防静电定位块318,进而可方便人工快速放料,以提高产品检测的工作效率。
76.如图11所示,示出了吸附单元的具体结构,本公开实施例中,吸附单元32包括转台连接座321、接头支撑杆322、球阀开关323、载台真空分流块324、微管接头325、感应钣金326、转台限位胶垫327、转台限位块328及圆柱销329。
77.θ轴旋转单元32通过圆柱销329与载台311连接。也即,在载台311上设置通孔,通孔的数量与圆柱销329的数量相同,连接时,圆柱销329拆入通孔内,进而实现载台311与转台连接座321的连接。
78.转台连接座321安装在谐波减速机412(结构参考后面的文字描述)上,并与载台311连接;可通过谐波减速机412驱动转台连接座321转动,进而实现对检测组件1的θ轴向补偿,以及保证载台311检测边缘与大理石底座直线电机221运动平行。接头支撑杆322连接转台连接座321和载台真空分流块324,球阀开关323安装在载台真空分流块324上,分别控制载台311的各项气路开关,进而可实现对待测产品的真空吸附;也即,载台311上放置待测产品后,启动吸附单元32,将待测产品吸附固定在载台311上,实现对待测产品的定位,气动固定的连接方式操作简单快捷,且对于待测产品的固定效果好,以及不会对待测产品的表面造成破损、毁坏。
79.例如,转台限位胶垫327与转台限位块328连接,安装在转台连接座321下方,转台连接座321旋转至一定位置后,触碰θ轴旋转单元41上的限位结构(结构参考后面的文字描述),使得载台311无法继续转动,从而达到防止过撞的作用。
80.如图5所示,示出了输送组件4的具体结构,本公开实施例中,输送组件4包括θ轴旋转单元41和y轴输送单元42。θ轴旋转单元41及y轴输送单元42用于驱动载台组件3沿θ轴方向和y轴方向的调节,输送组件4与移动组件2配合,可实现对检测组件1或载台组件3在x轴方向、y轴方向、z轴方向以及θ轴方向旋转,多维方向调节,确保视觉检测的精准性。
81.如图12所示,θ轴旋转单元41包括减速机安装底板411、谐波减速机412、固定法兰413、槽型光电传感器414、载台立板415、载台侧立板416、第二伺服电机417、载台限位胶垫418和转台限位座419。
82.谐波减速机412安装在减速机安装底板411上,并与第二伺服电机417连接,第二伺服电机417设置在载台立板415与载台侧立板416所围成的空间内;载台限位胶垫418与转台限位座419连接,与上述转台限位胶垫327与转台限位块328配合,可防止旋转时过撞;槽型光电传感器414安装在固定法兰413上;载台立板415与载台侧立板416连接。
83.谐波减速机412与载台311连接,通过第二伺服电机417驱动谐波减速机412和载台311同步转动,进而实现θ轴向的调节,其中,载台限位胶垫418、转台限位座419与转台限位胶垫327、转台限位块328配合达到防止过撞的目的。另外,在谐波减速机412的外围设置一个或多个的槽型光电传感器414,通过槽型光电传感器414获取谐波减速机412的转动信息,控制器可根据该转动信息控制第二伺服电机417的启停,从而达到θ轴向的精准调节。
84.如图13所示,本公开实施例中,y轴输送单元42包括大理石y轴模组底座421、丝杠模组422、螺旋管423、塑料管夹424、模组动子板425、y轴拖链移动固定钣金426、拖链行槽垫板427、y轴拖链行槽428及y轴拖链429。其中,丝杠模组422中包括第二驱动电机和第二滑轨,模组动子板425为第二滑块。
85.丝杠模组422安装在大理石y轴模组底座421,保证y轴高精度平稳运动;模组动子板425安装在丝杠模组422上;螺旋管423通过塑料管夹424固定,与载台真空分流块324连接。y轴拖链行槽428与拖链行槽垫板427连接;y轴拖链429安装在y轴拖链行槽428上。
86.载台侧立板416的底部与模组动子板425的表面固定连接,从而使θ轴旋转单元41可同y轴输送单元42沿y轴向同步移动,进而实现在y轴方向对载台组件3进行调节。
87.如图14所示,本公开实施例提供一种视觉检测方法,方法包括:
88.步骤s20:获取检测组件1的检测端与待测产品间的距离信息。视觉检测时,需要实时获取检测组件1前端的距离信息,然后,再根据该距离信息,及时对检测组件1的位置进行调节,从而达到检测组件1的z轴运动补偿的目的。
89.本公开实施例中,距离信息通过本公开实施例公开的视觉检测装置中的位移传感器119获取。具体的获取方式可参考上述有关视觉检测装置的描述,此处便不再赘述。
90.步骤s30:对比距离信息和预设距离,并确定距离信息与预设距离沿z轴方向的距离差。根据距离差,确定z轴补充的行程。例如,标准的距离为一设定距离,且无距离差时,计数为零,距离信息变大时,距离差为正数,反之,距离信息减小时,距离差为负数。
91.步骤s40:根据距离差信息发送驱动信号,通过z轴补偿单元21驱动检测组件1沿z轴方向移动,以消除距离差。
92.当距离差为正数时,需要缩小检测组件1检测端与待测产品间的距离,当距离差为负数时,需要增大检测组件1检测端与待测产品间的距离。具体的驱动及消除方式,可参考上述有关视觉检测装置的描述,此处便不再赘述。
93.本公开实施例中,检测组件1包括异物检测单元11和外观检测单元12,该方法中通过z轴补偿单元21驱动异物检测单元11和外观检测单元12沿z轴方向移动,以使异物检测单元11和外观检测单元12与待测产品保持相同距离。
94.也即,异物检测单元11和外观检测单元12均可实现在z轴方向的运动补偿,异物检测单元11用于获取待测产品的导电粒子图像信息,外观检测单元12用于获取待测产品的集成电路图像信息,两者获取图像信息过程中,始终与待测产品保持在同一检测距离,进而可获取高质量的成像及检测效果。
95.例如,在步骤s20中通过位移传感器119实时获取与待测产品间的距离信息,后续的步骤中,实时的确定检测组件1z轴方向的距离差,并通过z轴补偿单元21对异物检测单元11和外观检测单元12进行实时的z轴方向补偿,以实现实时的消除距离差。
96.如图15所示,本公开实施例提供一种视觉检测方法,方法还包括:
97.步骤s10:确定检测组件1的检测边缘和检测组件1的移动角度;使检测组件1位于检测边缘中,以移动角度移动。
98.当待测产品完成安装后(稳定安装在检测平台上),将待测产品移动至检测位,然后,在大理石底座直线电机的作用下,移动检测组件1,检测组件1中包括对位相机模组,对位相机模组对待测产品进行mark点拍照定位,并结合标定坐标系,确定检测组件1在检测时所需的检测边缘及移动角度,以及将该信息反馈给运动控制系统。
99.在检测过程中,运动控制系统根据移动角度信息调节待测产品所在平台的角度,然后,检测组件1复位移动至检测的初始位置。启动检测操作,检测组件1在检测边缘范围内进行异物及外观检测,也即,进行步骤20至步骤40的操作。
100.需要说明的是,本公开实施例中视觉检测方法的描述,与上述视觉检测装置实施例的描述是类似的,具有同装置实施例相似的有益效果,因此不做赘述。对于本公开实施例提供的视觉检测方法中未尽的技术细节,可以根据图1至图13任一附图的说明而理解。
101.根据本公开实施例中的视觉检测装置进行视觉检测的方法如下:
102.首先,进行待测产品的上料操作。预先获取待测产品的尺寸信息,检测操作人员调节第一定位块和第二定位块(x防静电定位块315和y防静电定位块318)的位置,放置待测产品在载台311上,使待测产品的边缘分别贴近x防静电定位块315和y防静电定位块318,然后,启动吸附单元32,使待测产品被吸附在载台311上,至此,完成待测产品的上料操作。载台组件3随输送组件4沿y轴方向移动至检测位,该位置,载台组件3位于检测组件1的下方。
103.启动检测,检测组件1移动,对位相机与待测产品进行对位操作,即mark点拍照定位,确定待测产品检测位置,以及确定移动组件2的移动行程,并反馈给运控系统(控制器),运控系统发送脉冲给谐波减速机412进行θ轴向补偿;大理石底座直线电机221回到检测的初始位;第二步进行图像采集,图像采集过程中,通过位移传感器119实时获取距离信息,z轴补偿单元21实时调节检测组件1的高度(z轴向),通过z轴补偿,可确保检测距离始终保持相同。
104.信息采集完成后,输送组件4将载台组件3复位至初始的上料位,吸附单元32关闭,取下待测产品,然后,放置下一个待测产品。
105.本公开实施例提供的一种视觉检测装置及方法,可用于包括但不限于触摸屏、电容屏、电阻屏、液晶屏、平板电脑、手机屏等在绑定的工艺中所要用到的异方性导电胶膜的导电粒子异物检测及集成电路外观检测;检测过程中,可对检测组件实现z轴方向的补偿,即通过位移传感器实时检测检测组件与待测产品的间距,当距离改变(增大或减小)时,通过z轴运动补偿的方式使距离保持在固定状态。基于此,即便待测产品存在加工误差和装配误差的情况,通过z轴的实时补偿调整,仍可保持在同一检测距离,保证了成像质量和检测效果。
106.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特
点包含于本公开的至少一个实施例或示例中。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
107.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或隐含地包括至少一个该特征。在本公开的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
108.以上,仅为本公开的具体实施方式,但本公开的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本公开揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本公开的保护范围之内。因此,本公开的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1