一种幅条k空间下的快速自旋回波的校正方法及系统与流程
1.本发明涉及核磁共振检测技术,具体涉及一种幅条k空间下的快速自旋回波的校正方法及系统。
背景技术:
2.核磁共振成像中,快速自旋回波类序列,通常利用cpmg条件避免伪影的出现。由于理想的cpmg条件很难达到,所以会有一系列的补偿措施,来确保在回波链中各个级别回波的一致。各个补偿方法中,最灵活适应的通常采用预扫描的方式,在序列实施的选层梯度、读出梯度、相位梯度基本确立的情况下,确定回波之间的差异从而实施补偿。
3.梯度固定的情况下,误差通常是确定的,因此常规笛卡尔k空间,由于选层、读出梯度不变,针对这些梯度误差的预扫描流程相对简单,通常可以只采集一个激发下的误差来应用到全体k空间。如果采用辐条状k空间采集,由于梯度随着辐条角度不停在变化,一个激发不足以覆盖全部的梯度情况。
技术实现要素:
4.针对上述问题,本发明提供一种幅条k空间下的快速自旋回波的校正方法,包括:
5.在自旋回波的选层梯度方向的每个预设间隔上选取一个测试平面;
6.根据预设角度旋转第一个测试平面,根据第一个测试平面的初始读出梯度、初始相位梯度的编码数值,获取第一读出梯度和第一相位梯度的编码数值;
7.根据自旋回波在第一聚相脉冲后对应形成的第一回波和第二回波在等中心处的相位值,计算所述第一聚相激发脉冲的修正相位;
8.根据第一回波和第二回波的相位差值,获得所述第一读出梯度的修正值和第一相位梯度的修正值;
9.使用所述第一聚相激发脉冲的修正相位、第一读出梯度的修正值和第一相位梯度的修正值,分别修正第一回波和第二回波之间的系统误差、所述第一读出梯度和第一相位梯度的编码数值。
10.进一步的,还包括:
11.根据预设角度继续旋转第一个测试平面,根据自旋回波在第二修正激发脉冲后对应形成的第一自旋回波和第二自旋回波在等中心处的相位值,计算所述第二修正激发脉冲的相位;
12.将第一个测试平面第一次旋转后获得的修正后的读出梯度、相位梯度作为初始读出梯度、初始相位梯度的编码数值,根据所述初始读出梯度、初始相位梯度的编码数值,获取第二读出梯度和第二相位梯度的编码数值;
13.根据第一回波和第二回波的相位差值,获得第二读出梯度的修正值和第一相位梯度的修正值;
14.用所述第二修正激发脉冲的相位、第二读出梯度的修正值和第二相位梯度的修正
值,分别修正第一回波和第二回波之间的系统误差、修正所述第一个测试平面第二次旋转的读出梯度、相位梯度的编码数值和相位;根据上述步骤,依次修正第一个测试平面每次旋转的读出梯度、相位梯度的编码数值和相位,直至完成所述第一个测试平面所有梯度的修正。
15.进一步的,在完成所述第一个测试平面所有梯度的修正的步骤之后,还包括:
16.根据第一个测试平面的对相位、读出梯度和相位梯度的修正步骤,依次修正剩余的测试平面的相位、读出梯度和相位梯度。
17.进一步的,根据第一回波和第二回波的相位差值,获得第二读出梯度的修正值和第一相位梯度的修正值,包括:
18.根据第一回波和第二回波的相位差值,获得第二读出梯度的修正梯度,根据所述修正梯度的持续时间,计算所述第二读出梯度的修正值;
19.根据初始相位梯度和第二相位梯度的相位斜率、磁旋比及初始相位到第二相位的持续时间,计算第二相位梯度的修正值。
20.进一步的,根据自旋回波在第一修正激发脉冲后对应形成的第一自旋回波和第二自旋回波在等中心处的相位值,计算所述第一修正激发脉冲的相位,包括:
21.在第一修正激发脉冲180。后,获取第一自旋回波和第二自旋回波在等中心处的相位值φ1,φ2,计算所述第一修正激发脉冲的相位φ,具体为:
22.φ=(φ1-φ2)/2
[0023][0024]
进一步的,根据第一回波和第二回波的相位差值,获得所述第一读出梯度的修正值和第一相位梯度的修正值,包括:
[0025]
根据第一回波和第二回波的相位差值,获得第一读出梯度的修正梯度,根据所述修正梯度的持续时间,计算所述第一读出梯度的修正值;
[0026]
根据第一回波和第二回波的相位差值,获得第一相位梯度的修正梯度,根据所述修正梯度的持续时间,计算所述第一相位梯度的修正值。
[0027]
进一步的,根据初始读出梯度和第一读出梯度的相位斜率、磁旋比及初始梯度到第一梯度的持续时间,计算第一读出梯度的修正值,具体的为:
[0028][0029][0030]
g=s/t
[0031]
其中,为初始读出梯度和第一读出梯度的相位斜率,γ为磁旋比,s为以面积表示的第一梯度,t为初始梯度到第一梯度的持续时间。
[0032]
进一步的,根据初始相位梯度和第一相位梯度的相位斜率、磁旋比及初始相位到第一相位的持续时间,计算第一相位梯度的修正值,具体为:
[0033][0034][0035]
g=s/t
[0036]
其中,为初始相位梯度和第一相位梯度的相位斜率,γ为磁旋比,s为以面积表示的第一相位梯度,t为初始相位梯度到第一相位梯度的持续时间。
[0037]
进一步的,还包括:
[0038]
若所述测试平面是xy平面,随着旋转角度α的改变,读出梯度和相位梯度将由x路和y路梯度合成:
[0039]
greadx=gread*cos(α);gready=gread*sin(α);
[0040]
gphasex=gphase*sin(α);gphasey=gphase*cos(α)。
[0041]
本发明同时提供一种幅条k空间下的快速自旋回波的校正系统,包括:
[0042]
测试平面选取模块,用于在自旋回波的选层梯度方向的每个预设间隔上选取一个测试平面;
[0043]
第一编码数值获取模块,用于根据预设角度旋转第一个测试平面,根据第一个测试平面的初始读出梯度、初始相位梯度的编码数值,获取第一读出梯度和第一相位梯度的编码数值;
[0044]
第一修正相位计算模块,用于根据自旋回波在第一聚相脉冲后对应形成的第一回波和第二回波在等中心处的相位值,计算所述第一聚相激发脉冲的修正相位;
[0045]
第一修正值获取模块,用于根据第一回波和第二回波的相位差值,获得所述第一读出梯度的修正值和第一相位梯度的修正值;
[0046]
第一修正模块,用于使用所述第一聚相激发脉冲的修正相位、第一读出梯度的修正值和第一相位梯度修正值,分别修正第一回波和第二回波之间的系统误差、修正所述第一读出梯度和第一相位梯度的编码数值。
[0047]
本发明提供的一种幅条k空间下的快速自旋回波的校正方法及系统,构建幅条k空间下的快速自旋回波的校正模型,每个激发脉冲后,会重新计算梯度的补偿,解决幅条k空间下由于梯度随着辐条角度不停在变化,一个激发脉冲不足以覆盖全部的梯度情况,导致成像出像伪影的问题。
附图说明
[0048]
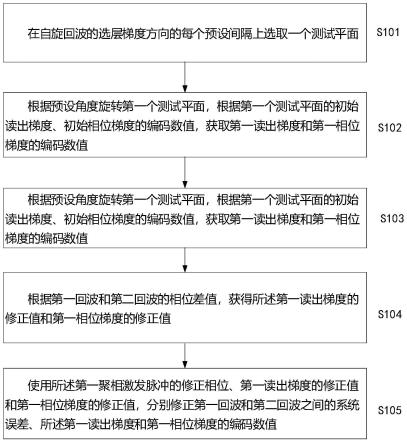
图1是本发明提供的一种幅条k空间下的快速自旋回波的校正方法的流程示意图;
[0049]
图2是本发明涉及的常规自旋回波的序列时序图;
[0050]
图3是本发明涉及的修正梯度及修正相位的位置图;
[0051]
图4是本发明涉及的幅条k空间成像平面的旋转角度的示意图;
[0052]
图5是本发明涉及的幅条k空间下的快速自旋回波的校正模型的构建流程图;
[0053]
图6是本发明涉及的一种幅条k空间下的快速自旋回波的校正系统的结构示意图。
具体实施方式
[0054]
在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受下面公开的具体实施的限制。
[0055]
常规自旋回波的序列时序图如图2所示,在每一个180聚焦脉冲1后,形成一个自旋回波2,通过改变相位编码梯度3的幅度,采集k空间不同位置的编码信息。
[0056]
现实中,cpmg条件很难满足,因此回波2以及后续回波存在着相位误差,这种误差会不可避免的在最终图像上出现伪影。
[0057]
为了消除这种影响,本发明提供一种幅条k空间下的快速自旋回波的校正方法,如图1所示,包括如下步骤:
[0058]
步骤s101,在自旋回波的选层梯度方向的每个预设间隔上选取一个测试平面。
[0059]
步骤s102,根据预设角度旋转第一个测试平面,获取第一读出梯度和第一相位梯度的编码数值。
[0060]
据预设角度旋转第一个测试平面,根据初始读出梯度、初始相位梯度的的编码数值,获得旋转后第一读出梯度和第一相位梯度的编码数值。
[0061]
步骤s103,根据自旋回波在第一聚相脉冲后对应形成的第一回波和第二回波在等中心处的相位值,计算所述第一聚相激发脉冲的修正相位。
[0062]
在图3所示的第一修正激发脉冲180。后,获取第一自旋回波和第二自旋回波在等中心处的相位值φ1,φ2,计算所述第一修正激发脉冲的相位φ,具体为:
[0063]
φ=(φ1-φ2)/2
[0064][0065]
步骤s104,根据第一回波和第二回波的相位差值,获得所述第一读出梯度的修正值和第一相位梯度的修正值。
[0066]
根据第一回波和第二回波的相位差值,获得第一读出梯度的修正梯度,根据所述修正梯度的持续时间,计算所述第一读出梯度的修正值,具体的,根据初始读出梯度和第一读出梯度的相位斜率、磁旋比及初始梯度到第一梯度的持续时间,计算第一读出梯度的修正值,如图3中箭头4所示的梯度,具体的为:
[0067][0068][0069]
g=s/t
[0070]
其中,为初始读出梯度和第一读出梯度的相位斜率,γ为磁旋比,s为以面积表示的第一梯度,t为初始梯度到第一梯度的持续时间。
[0071]
根据第一回波和第二回波的相位差值,获得第一相位梯度的修正梯度,根据所述修正梯度的持续时间,计算所述第一相位梯度的修正值,具体的,根据初始相位梯度和第一相位梯度的相位斜率、磁旋比及初始相位到第一相位的持续时间,计算第一相位梯度的修正值,如图3中箭头5所示的梯度,具体为:
[0072][0073][0074]
g=s/t
[0075]
其中,为初始相位梯度和第一相位梯度的相位斜率,γ为磁旋比,s为以面积表示的第一相位梯度,t为初始相位梯度到第一相位梯度的持续时间。
[0076]
第一读出梯度的修正值和第一相位梯度的修正值和第一修正激发脉冲的相位φ的数值会随着选层位置,梯度大小的变化而变化。
[0077]
步骤s105,使用所述第一聚相激发脉冲的修正相位、第一读出梯度的修正值和第一相位梯度的修正值,分别修正第一回波和第二回波之间的系统误差,修正所述第一读出梯度和第一相位梯度的编码数值。
[0078]
在修正系统误差和第一读出梯度和第一相位梯度的编码数值后,根据预设角度继续旋转第一个测试平面,根据自旋回波在第二修正激发脉冲后对应形成的第一自旋回波和第二自旋回波在等中心处的相位值,计算所述第二修正激发脉冲的相位;
[0079]
将第一个测试平面第一次旋转后获得的修正后的读出梯度、相位梯度作为初始读出梯度、初始相位梯度的编码数值,根据所述初始读出梯度、初始相位梯度的编码数值,获取第二读出梯度和第二相位梯度的编码数值;
[0080]
根据第一回波和第二回波的相位差值,获得第二读出梯度的修正值和第一相位梯度的修正值;根据第一回波和第二回波的相位差值,获得第二读出梯度的修正梯度,根据所述修正梯度的持续时间,计算所述第二读出梯度的修正值;根据初始相位梯度和第二相位梯度的相位斜率、磁旋比及初始相位到第二相位的持续时间,计算第二相位梯度的修正值。
[0081]
用所述第二修正激发脉冲的相位、第二读出梯度的修正值和第二相位梯度的修正值,分别修正第一回波和第二回波之间的系统误差、修正所述第一个测试平面第二次旋转的读出梯度、相位梯度的编码数值和相位;根据上述步骤,依次修正第一个测试平面每次旋转的读出梯度、相位梯度的编码数值和相位,直至完成所述第一个测试平面所有梯度的修正。
[0082]
在完成所述第一个测试平面所有梯度的修正后,根据第一个测试平面的对相位、读出梯度和相位梯度的修正步骤,依次修正剩余的测试平面的相位、读出梯度和相位梯度。从而构建幅条k空间下的快速自旋回波的校正模型。
[0083]
进一步的,若所述测试平面是xy平面,随着旋转角度α的改变,读出梯度和相位梯度将由x路和y路梯度合成,如图4所示:
[0084]
greadx=gread*cos(α);gready=gread*sin(α);
[0085]
gphasex=gphase*sin(α);gphasey=gphase*cos(α)。
[0086]
梯度输出的变化,导致系统状态的改变,修改正梯度4、5和修改正相位也会同时随着变化。为满足奈奎斯特采样定律,辐条k空间相位编码数为笛卡尔坐标系下的π/2倍,这意味了通过扫描时先预扫描计算修正值所花费的时间非常长。
[0087]
幅条k空间下的快速自旋回波的校正模型的构建流程如图5所示,沿选层梯度方向每隔定长选取一个测试平面,确定读出梯度和相位梯度的编码数值,并按不大于10
°
的角度旋转,获取回波信号,根据回波信号计算对应的读出梯度的修正值g4,相位梯度的修正值g5,以及修正相位φ,然后,使用上述三个修正值修正读出梯度和相位梯度的编码数值,以及回波的系统误差,接着,继续按不大于10
°
的角度旋转第一个测试平面,确定第二次旋转的读出梯度和相位梯度的编码数值,然后计算对应的读出梯度的修正值g4,相位梯度的修正值g5,以及修正相位φ,使用上述三个修正值修正第二次旋转获得的读出梯度和相位梯度的编码数值,以及回波的系统误差,直至第一个测试平面的所有梯度修正完成。根据第一个测试平面的对相位、读出梯度和相位梯度的修正步骤,依次修正剩余的测试平面的相位、读出梯度和相位梯度。至此,校正模型构建完成。
[0088]
基于同一发明构思,本发明同时提供一种条k空间下的快速自旋回波的校正系统,如图6所示,包括:
[0089]
测试平面选取模块610,用于在自旋回波的选层梯度方向的每个预设间隔上选取一个测试平面;
[0090]
第一编码数值获取模块630,用于根据预设角度旋转第一个测试平面,根据第一个测试平面的初始读出梯度、初始相位梯度的编码数值,获取第一读出梯度和第一相位梯度的编码数值;
[0091]
修正相位计算模块640,用于根据自旋回波在第一聚相脉冲后对应形成的第一回波和第二回波在等中心处的相位值,计算所述第一聚相激发脉冲的修正相位;
[0092]
第一修正值计算模块650,用于根据第一回波和第二回波的相位差值,获得所述第一读出梯度的修正值和第一相位梯度的修正值;
[0093]
第一修正模块660,用于使用所述第一聚相激发脉冲的修正相位、第一读出梯度的修正值和第一相位梯度修正值,分别修正第一回波和第二回波之间的系统误差、修正所述第一读出梯度和第一相位梯度的编码数值。
[0094]
进一步的,还包括:
[0095]
第二修正相位计算模块,用于根据预设角度继续旋转第一个测试平面,根据自旋回波在第二修正激发脉冲后对应形成的第一自旋回波和第二自旋回波在等中心处的相位值,计算所述第二修正激发脉冲的相位;
[0096]
第二修正值获取模块,用于将第一个测试平面第一次旋转后获得的修正后的读出梯度、相位梯度作为初始读出梯度、初始相位梯度的编码数值,根据所述初始读出梯度、初始相位梯度的编码数值,获取第二读出梯度和第二相位梯度的编码数值;
[0097]
第二修正值获取模块,用于根据第一回波和第二回波的相位差值,获得第二读出梯度的修正值和第一相位梯度的修正值;
[0098]
第二修正模块,用于使用所述第二修正激发脉冲的相位、第二读出梯度的修正值和第二相位梯度的修正值,分别修正第一回波和第二回波之间的系统误差、修正所述第一个测试平面第二次旋转的读出梯度、相位梯度的编码数值和相位;根据上述步骤,依次修正第一个测试平面每次旋转的读出梯度、相位梯度的编码数值和相位,直至完成所述第一个测试平面所有梯度的修正。
[0099]
进一步的,还包括:
[0100]
修正模块,用于根据第一个测试平面的对相位、读出梯度和相位梯度的修正步骤,依次修正剩余的测试平面的相位、读出梯度和相位梯度。
[0101]
进一步的,第一修正值获取模块,包括:
[0102]
第二读出梯度修正值获取子模块,用于根据第一回波和第二回波的相位差值,获得第二读出梯度的修正梯度,根据所述修正梯度的持续时间,计算所述第二读出梯度的修正值;
[0103]
第二相位梯度修正值获取子模块,用于根据初始相位梯度和第二相位梯度的相位斜率、磁旋比及初始相位到第二相位的持续时间,计算第二相位梯度的修正值。
[0104]
进一步的,第一修正相位计算模块,包括:
[0105]
在第一修正激发脉冲180。后,获取第一自旋回波和第二自旋回波在等中心处的相位值φ1,φ2,计算所述第一修正激发脉冲的相位φ,具体为:
[0106]
φ=(φ1-φ2)/2
[0107][0108]
进一步的,第一修正值获取模块,包括:
[0109]
第一读出梯度计算子模块,用于根据第一回波和第二回波的相位差值,获得第一读出梯度的修正梯度,根据所述修正梯度的持续时间,计算所述第一读出梯度的修正值;
[0110]
第一相位梯度计算子模块,用于根据第一回波和第二回波的相位差值,获得第一相位梯度的修正梯度,根据所述修正梯度的持续时间,计算所述第一相位梯度的修正值。
[0111]
进一步的,根据初始读出梯度和第一读出梯度的相位斜率、磁旋比及初始梯度到第一梯度的持续时间,计算第一读出梯度的修正值,具体的为:
[0112][0113][0114]
g=s/t
[0115]
其中,为初始读出梯度和第一读出梯度的相位斜率,γ为磁旋比,s为以面积表示的第一梯度,t为初始梯度到第一梯度的持续时间。
[0116]
进一步的,根据初始相位梯度和第一相位梯度的相位斜率、磁旋比及初始相位到第一相位的持续时间,计算第一相位梯度的修正值,具体为:
[0117][0118][0119]
g=s/t
[0120]
其中,为初始相位梯度和第一相位梯度的相位斜率,γ为磁旋比,s为以面积表示的第一相位梯度,t为初始相位梯度到第一相位梯度的持续时间。
[0121]
进一步的,还包括:
[0122]
梯度合成模块,若所述测试平面是xy平面,随着旋转角度α的改变,读出梯度和相位梯度将由x路和y路梯度合成:
[0123]
greadx=gread*cos(α);gready=gread*sin(α);
[0124]
gphasex=gphase*sin(α);gphasey=gphase*cos(α)。
[0125]
本发明提供的一种幅条k空间下的快速自旋回波的校正方法及系统,构建幅条k空间下的快速自旋回波的校正模型,每个激发脉冲后,会重新计算梯度的补偿,解决幅条k空间下由于梯度随着辐条角度不停在变化,一个激发脉冲不足以覆盖全部的梯度情况,导致成像出像伪影的问题。
[0126]
最后应该说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制,尽管参照上述实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解依然可以对本发明的具体实施方式进行修改或者等同替换,而未脱离本发明精神和范围的任何修改或者等同替换,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1