外挂式相对重力仪多功能调平系统及调平和标校方法与流程
1.本发明属于重力仪调平技术领域,具体涉及一种外挂式相对重力仪多功能调平系统及调平和标校方法。
背景技术:
2.弹簧式静态相对重力仪是一种定点测量重力的高精度重力仪,需要在定点测量时保持弹簧重力敏感器处于相对水平零位状态。目前,无论是进口还是国产自研的静态相对重力仪,均采用纯手动调平三角支架实现水平零位调整。这种纯手动调平装置操作性能单一,且工作效率较低,不利于高效率和高精度重力测量。
技术实现要素:
3.本发明的目的是在于克服现有技术的不足之处,提供一种提高水平零位调平效率,满足多种工作需求的挂式相对重力仪多功能调平系统及调平和标校方法。
4.本发明的上述目的之一通过如下技术方案来实现:
5.一种挂式相对重力仪多功能调平系统,其特征在于:包括三角状调平装置及集成式高精度倾角仪传感器;所述集成式高精度倾角仪传感器与弹簧重力敏感器同轴线紧贴安装,用于精准检测重力敏感器的倾斜情况;所述三角状调平装置包括等腰三角形调平支架、两组水平指示气泡、三个支撑调节腿、控制电路板、电源模块、信号指示灯、矩形电连接器;所述三个支撑调节腿分别为x轴支撑调节腿、y轴支撑调节腿和z轴支撑调节腿;所述z轴支撑调节腿为手动支撑调节腿,所述x轴支撑调节腿、y轴支撑调节腿均为自动和手动调节复合式支撑腿;
6.所述三个支撑调节腿与等腰三角形调平支架垂直连接,三个支撑调节腿的中心线设置于等腰三角形的三个顶点上,x轴支撑调节腿与z轴支撑调节腿的中心连线方向、y轴支撑调节腿和z轴支撑调节腿的中心连线方向分别与高精度倾角仪传感器的x轴和y轴方向一致;所述z轴支撑调节腿由同轴上下设置的支撑顶角和地脚构成,地脚上端为螺杆结构,在三角形调平支架的下端设置有螺纹孔,螺杆与三角形调平支架下端的螺纹孔连接,支撑顶角下端通过法兰与等腰三角形调平支架固定连接,上端为锥形顶尖结构;x轴支撑调节腿和x轴支撑调节腿采用相同的结构形式,均由同轴上下设置的自动可调顶角组件及地脚构成,自动可调顶角组件由驱动电机及顶尖杆构成,驱动电机采用空心轴电机,并在空心轴内设有内螺纹,所述顶尖杆的下端设置有外螺纹,上端为锥形顶尖结构;所述顶尖杆通过下端的外螺纹与空心轴电机的内螺纹孔形成驱动连接,所述空心轴电机与三角形调平支架的上端固定连接,x轴支撑调节腿和x轴支撑调节腿的地脚通过上端的螺纹杆与等腰三角形调平支架上的螺纹孔形成螺纹连接;
7.所述两组水平指示气泡沿x轴和y轴方向分别固定安装在等腰三角形调平支架的上端,x轴和y轴方向的水平状态;所述信号指示灯安装于等腰三角形调平支架的上端,用于指示自动调平模式下的相应状态;所述电源模块和控制电路板安装于三角形调平支架中心
pid控制算法控制电机自动调节,具有自动学习能力,可实现较为理想的控制效果。
23.3、本发明设计成常规自动调平模式和倾斜-重力关系自动标定模式双功能。既满足常规重力测量时启动常规自动调平模式,也可以在实验室做倾斜-重力标定测试时启动倾斜-重力关系自动标定模式(大批量重力仪需要标定时更能体现出此功能的优势),可大大提高工作效率,解放劳动力。
附图说明
24.图1是本发明等腰三角形调平支架与倾角仪轴向关系示意图;
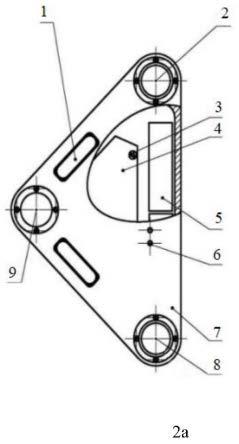
25.图2是本发明三角状调平装置的结构示意图;其中,2a为俯视图;2b为正视图;
26.图3是本发明调平装置与重力仪连接示意图;
27.图4是本发明双轴倾斜主动调平反馈控制原理框图;
28.图5是本发明常规自动调平模式和倾斜-重力关系自动标定控制流程图。
具体实施方式
29.以下结合附图并通过实施例对本发明的结构作进一步说明。需要说明的是本实施例是叙述性的,而不是限定性的。
30.一种外挂式相对重力仪多功能调平系统,请参见图1-5,包括三角状调平装置及集成式高精度倾角仪传感器11。所述集成式高精度倾角仪传感器与弹簧重力敏感器同轴线紧贴安装,用于精准检测重力敏感器的倾斜情况。所述三角状调平装置的基础结构件为等腰三角形调平支架,在等腰三角形调平支架上垂直安装有三个支撑调节腿,三个支撑调节腿的中心线设置于等腰三角形的三个顶点上。其中一个支撑调节腿设计为纯手动调节高度,该支撑调节腿定义为z轴支撑调节腿,测量作业时用于固定一个标准高度,其它两个支撑调节腿以此为高度基准。其它两个支撑调节腿设计为自动-手动调节复合双模式结构,这两个支撑调节腿分别对应为x轴支撑调节腿和y轴支撑调节腿,倾角仪传感器的x轴和y轴方向与x轴支撑调节腿和y轴支撑调节腿成一一对应关系。
31.本实施例的等腰三角形调平支架如图1所示,设a、b、c分别代表z、x、y轴支撑腿,a为固定高度,b、c以a为基准高度进行高度调节,进而实现a、b、c在同一高度水平面上。当倾角仪x、y轴与调平支架x、y轴向完全对应,设两等腰边长为l,当b、c两支撑腿向a的轴向位移分别为lb和lc,此时倾角仪传感器x轴、y轴的倾斜角分别为θ
x
、θy,在很小倾斜角范围内,轴向位移与倾斜角关系可等价为:
[0032][0033]
由式(1)可知等腰三角形调平支架可实现x、y轴正交无耦合调平,即x、y轴支撑腿各自运动相互不影响,为后续自动调平控制算法奠定简化基础。当倾角仪传感器与水平基准面的安装误差极小可忽略不计,则倾斜角θ与重力变化量δg关系等价为:
[0034][0035]
由于相对重力仪测量精度较高,允许倾斜造成的误差不超过5μgal(5x10-8
ms2),故
由此推算出水平零位偏差不得超过10-4
rad。本设计的三角调平装置的两等腰边长l=18cm,当θ=10-4
rad,则有式(1)可得lb或lc等于18μm,故要求步进电机行进精度优于18μm。为了使重力仪稳定可靠地放置三角调平装置上,设计三角调平装置内心(内切圆圆心)与重力仪重心在垂轴线重合,由理论推算可到内心至三角形三边距离为:
[0036][0037]
内心至三角调平装置的a支点距离为:
[0038][0039]
内心至三角调平装置的b、c支点距离为:
[0040][0041]
由式(3)、(4)和(5)可求得l
oa
:l
ob
:l
oc
≈0.246:1:1。重力仪整体总量最大不超过10kg(98n),结合前面分析可求得x、y和z轴支撑腿分别称重约为43.633n、43.633n和10.734n,故电机驱动能力需大于43.633n,本设计采用定制步进电机,持续驱动能力为45n。
[0042]
上述三角状调平装置结构如图2所示,主体结构主要上述等腰三角形调平支架7、两组水平指示气泡1、上述三个支撑调节腿、控制电路板4、电源模块5、信号指示灯6、矩形电连接器10等组成。其中z轴支撑调节腿9由同轴上下设置的支撑顶角9.1和地脚9.2构成,地脚上端为螺杆结构,在三角形调平支架的下端设置有螺纹孔,螺杆与三角形调平支架下端的螺纹孔连接,通过旋转地脚,可实现z轴支撑高度的调节,支撑顶角下端通过法兰与等腰三角形调平支架固定连接,上端为锥形顶尖结构。x轴支撑调节腿2和y轴支撑调节腿3采用相同的结构形式,均由同轴上下设置的自动可调顶角组件及地脚(分别用2.3和8.3标注)构成,地脚的结构形式及与三角形调平支架的结构的连接方式参考上述z轴支撑调节腿及z轴支撑调节腿与三角形调平支架的结构的连接方式,在此不再赘述。而自动可调顶角组件由驱动电机(分别用2.2和8.2标注)及顶尖杆(分别用2.1和8.1标注)构成,驱动电机采用空心轴电机,并在空心轴内设有内螺纹,所述顶尖杆的下端设置有外螺纹,上端为锥形顶尖结构,顶尖杆的下端与空心轴电机驱动连接。在驱动电机的作用下,可实现顶尖杆的上下伸缩调节。
[0043]
所述两水平气泡用于指示三角调平装置的水平姿态,具体的,在等腰三角形调平支架上端沿x轴和y轴方向分别固定一水平气泡,通过两个水平气泡分别检测x轴和y轴方向的水平状态。信号指示灯用于指示自动调平模式下的相应状态,控制电路板用于接重力仪的控制系统发出的控制指令和控制驱动电机运动;等腰三角形调平支架用于连接三个支撑腿并放置电路板、电源模块、水平指示气泡、信号指示灯等,矩形连接器通过线缆将重力仪与调平装置进行信号联通。本设计的调平装置独立供电电源采用充电式锂电池,输出+24v/1.8a电压供控制电路板使用。
[0044]
正常工作时,调平装置与重力仪的连接如图3所示。自动调平模式时,先手动调节z轴支撑腿下部的地脚,以设置基准高度,再由控制电路板控制x、y轴支撑腿的自动可调顶角组件实行自动调平运动;手动调平模式时,先手动调节z轴支撑腿下部的地脚,设置基准高度,再手动调节x、y轴支撑腿下部的地脚,实现水平零位调平。
[0045]
上述驱动电机采用定制的高精度步进直线电机作为自动执行机构。采用独立电源
模块(可反复充电式锂电池),电源模块和控制电路板安装于三角形调平支架中心对称位置,其中驱动电路采用下螺柱和螺钉的配合结构3进行固定安装。工作时,重力仪主体与调平支架通过可回收式数据线进行信号连接,将倾角仪信号传输至电机控制电路板中,控制电路板将收集到的倾角信号做适当控制算法处理后,输出控制信号驱动控制x轴和y轴电机运动,以z轴支撑调节腿高度为基准,实现水平零位自动调平。当且电机驱动异常或不需要自动调平功能等特殊情况下,可启动x轴和y轴的手动调平模式,并可卸下电源模块减轻支架重量。同时,设计常规自动调平模式和倾斜-重力关系自动标定双功能,由重力仪的显控操作界面与调平装置控制电路板互发控制指令实现。
[0046]
本实施例的双轴倾斜主动调平反馈控制原理如图4所示。由前面分析可知,等腰三角形调平支架可实现x、y轴正交无耦合调平,故采取相同且独立的反馈控制电路实现对x、y轴支撑腿反馈控制。正常测量时,当z轴支撑腿基准高度已确定,x轴或y轴支撑腿相对于z轴支撑腿高度形成的倾斜位移量就会传输至tm4c123系列控制器(可满足两轴电机单独控制),控制器按照设定的神经元-pid控制算法输出的控制信号至tmc246全桥驱动器,驱动器输出驱动信号驱动x轴或y轴支撑腿的步进电机正反运动,迫使弹簧重力敏感器(含严格水平安装的倾角仪传感器)达到理想的水平零位(按实际应用,设定一定的水平零位范围),由此形成闭环反馈控制,实现自动调平,同时通过can总线将倾角仪传输至重力仪显控界面显示。由于x、y轴是正交无耦合的自动调平控制,且在外场测量时需要在不同测量点实现自动调平,针对此类反反复复地闭环控制运动,采用具有学习功能的神经元-pid控制算法控制电机运动,在运动中学习和修正参数,逐步积累学习经验,达到更好的控制效果。学习规则如式(6):
[0047]
δωi(k)=ηi·
z(k)
·
u(k)
·
xi(k)(6)
[0048]
式中ηi表示学习速率,z(k)表示控制系统偏差,u(k)表示控制器输出,xi(k)表示输入信号量,δωi(k)表示学习变化增量。由于x、y轴支撑腿电机是以某一基准零位正反转实现高度升降,故神经元网络激活函数采用双曲正切激活函数,其表达式如式(7):
[0049][0050]
此输出激活函数以0为中心,
±
1为边界,正负域梯度和权重一样,利于算法学习和水平零位反馈控制。
[0051]
本实施例的外挂式相对重力仪多功能调平系统的调平和标校方法控制流程图如图5所示,重力仪显控与自动调平装置采用双向can总线12通信,即显控操作界面与自动调平装置控制器互相发送和接收控制指令。当调平装置控制器收到显控发来的控制信号数字1时,控制器即时进入常规自动调平测量模式,并亮起红灯,当自动调平完成,将亮起绿灯,以此提示工作人员可开始重力测量;当调平装置控制器收到显控发来的控制信号数字2时,控制器即时倾斜-重力关系标定模式,并亮起红灯,当自动调平完成,将亮起绿灯,以此提示工作人员可开始倾斜-重力关系标定。自动调平完成10秒后,控制器向显控发数字指令3,显控收到指令后按照设定程序自动开启重力测量,同时调平装置控制器进行计时,调平装置按设定的一个重力测量时间(一般为5至10分钟,按需确定)保持水平姿态以保证重力测量无误,之后控制电机按规律升降x、y轴支撑腿高度,并在每一倾斜高度保持一个重力测量时间以保证重力测量无误,依次反复动作即可完成倾斜-重力关系标定,一个标定轮回完成时
亮起红灯,以此提示标定工作完成。
[0052]
尽管为说明目的公开了本发明的实施例和附图,但是本领域的技术人员可以理解:在不脱离本发明及所附权利要求的精神范围内,各种替换、变化和修改都是可以的,因此,本发明的范围不局限于实施例和附图所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1