一种精密测头导向机构6自由度数据解耦方法
1.本发明涉及一种精密测量领域,特别涉及一种精密测头导向机构6自由度数据解耦方法。
背景技术:
2.精密测头作为坐标测量机的关键部件,其发展水平直接影响着坐标测量机的测量精度、工作性能、使用效率和柔性程度。坐标测量机的发展历史也表明,只有在精密测头为坐标测量机提供新的触测原理、新的测量精度后,坐标测量机才能发生一次根本的变化。换言之,精密测头是限制坐标测量机精度和测量速度的主要因素,坐标测量机能否满足现代测量要求也依赖于精密测头系统的不断创新与发展。实现导向机构6自由度的精密测量对提升测头的测量精度起到至关重要的作用。
技术实现要素:
3.精密测头导向机构由固定部分、移动部分、弹性机构和传感器组成。固定部分和移动部分之间有一定的间隙,两者之间通过弹性机构连接,并利用传感器感知弹性变形量,从而确定被测表面的坐标信息。在进行某一固定方向的移动时,导向机构的移动部分易产生沿三维正交轴线的线位移运动和围绕三维正交轴线的角位移运动。本发明的目的在于精确测量出6个自由度信息,提出一种精密测头导向机构6自由度数据解耦方法。该方法通过使用一组差动电容传感器和两组正交布置的不等面积极板的电容传感器,能够测量出3个线位移量和3个角位移量,最终实现提升测头测量精度的目的。
4.上述目的通过以下的技术方案实现:
5.一种精密测头导向机构6自由度数据解耦方法所基于的导向机构,包括垂向连接板、第一固定板、第二固定板、第一固定板第一上压板、第一固定板第二上压板、差动板、第一移动板第一上压板、第一移动板第二上压板、第二移动板上压板、第一移动板、第二移动板、第一移动板下压板、第二移动板第一下压板、第二移动板第二下压板、第一固定板第一下压板、第一固定板第二下压板、第二固定板第一下压板、第二固定板第二下压板、第一组簧片、第二组簧片、差动电容传感器、第一不等面积极板电容传感器静平面、第二不等面积极板电容传感器静平面、第一不等面积极板电容传感器动平面、第二不等面积极板电容传感器动平面、第一定极板、第二定极板、第三定极板、第四定极板、第一动极板、第二动极板、第三动极板、第四动极板。第一移动板和第二移动板整体通过第一组簧片和第二组簧片与第一固定板和第二固定板整体连接,使第一移动板和第二移动板整体能够产生相对第一固定板和第二固定板整体的相对移动;测头测针的受力可以来自任意方向,因此第一移动板和第二移动板整体相对于第一固定板和第二固定板整体的移动也是空间6自由度方向中的任意方向。
6.差动电容传感器可以测量第一移动板和第二移动板整体沿z轴方向的线位移;第一移动板和第二移动板整体的6自由度移动可以引起第一不等面积极板电容传感器容值的
变化,但是无法仅根据第一不等面积极板电容传感器容值的变化解耦出对应自由度的运动;移动部分的6自由度移动可以引起第二不等面积极板电容传感器容值的变化,但是无法仅根据第二不等面积极板电容传感器容值的变化解耦出对应自由度的运动;将差动电容传感器、第一不等面积极板电容传感器和第二不等面积极板电容传感器组合使用,可以解耦出对应自由度的运动。
7.第一不等面积极板电容传感器和第二不等面积极板电容传感器中,第一定极板、第三定极板、第一动极板、第二动极板、第三动极板和第四动极板的面积相等,均为s1;第二定极板和第四定极板的面积相等,均为s2;s1》s2。
8.当第一移动板和第二移动板整体沿x轴线位移移动δx时,第一不等面积极板电容传感器的第一定极板和第一动极板的容值会减小;第三定极板和第三动极板的容值也会减小;而第二定极板和第二动极板的容值,第四定极板和第四动极板的容值均不会发生变化。同时,第二不等面积极板电容传感器的第一定极板和第一动极板的容值会发生变化;第二定极板和第二动极板的容值会发生变化;第三定极板和第三动极板的容值会发生变化;第四定极板和第四动极板的容值会发生变化。
9.当第一移动板和第二移动板整体沿y轴线位移移动δy时,第一不等面积极板电容传感器的第一定极板和第一动极板的容值会发生变化;第二定极板和第二动极板的容值会发生变化;第三定极板和第三动极板的容值会发生变化;第四定极板和第四动极板的容值会发生变化。同时,第二不等面积极板电容传感器的第一定极板和第一动极板的容值会减小;第三定极板和第三动极板的容值也会减小;而第二定极板和第二动极板的容值,第四定极板和第四动极板的容值均不会发生变化。
10.当第一移动板和第二移动板整体沿z轴线位移移动δz时,差动电容传感器的容值会发生变化;第一不等面积极板电容传感器的第一定极板和第一动极板的容值会减小;第三定极板和第三动极板的容值也会减小;而第二定极板和第二动极板的容值,第四定极板和第四动极板的容值均不会发生变化。同时,第二不等面积极板电容传感器的第一定极板和第一动极板的容值会减小;第三定极板和第三动极板的容值也会减小;而第二定极板和第二动极板的容值,第四定极板和第四动极板的容值均不会发生变化。
11.当第一移动板和第二移动板整体绕x轴角位移运动α时,第一不等面积极板电容传感器的第一定极板和第一动极板的容值会发生变化;第三定极板和第三动极板的容值会发生相反变化;而第二定极板和第二动极板的容值,第四定极板和第四动极板的容值均不会发生变化。同时,第二不等面积极板电容传感器的第一定极板和第一动极板的容值会减小;第三定极板和第三动极板的容值也会减小;而第二定极板和第二动极板的容值,第四定极板和第四动极板的容值均不会发生变化。
12.当第一移动板和第二移动板整体绕y轴角位移运动β时,第一不等面积极板电容传感器的第一定极板和第一动极板的容值会减小;第三定极板和第三动极板的容值也会减小;而第二定极板和第二动极板的容值,第四定极板和第四动极板的容值均不会发生变化。同时,第二不等面积极板电容传感器的第一定极板和第一动极板的容值会发生变化;第三定极板和第三动极板的容值会发生相反变化;而第二定极板和第二动极板的容值,第四定极板和第四动极板的容值均不会发生变化。
13.当第一移动板和第二移动板整体绕z轴角位移运动ε时,第一不等面积极板电容传
感器和第二不等面积极板电容传感器的情况相同,第一定极板和第一动极板的容值会减小,第三定极板和第三动极板的容值也会减小;第二定极板和第二动极板的容值会发生变化;第四定极板和第四动极板的容值会发生相反变化。
14.根据上述位移量与电容值的变化规律,可以实现导向机构6自由度冗余数据的精确解耦。
15.本发明具有以下特点及有益效果:
16.本发明方法包含的差动电容传感器与2组正交布置的不等面积极板的电容传感器,可使用冗余数据高精度的分解出测头导向模块沿x、y和z轴,以及绕x、y和z轴的6个自由度。
17.本发明装置用途广泛,尤其适用于精密测头中的高精度导向模块。
附图说明
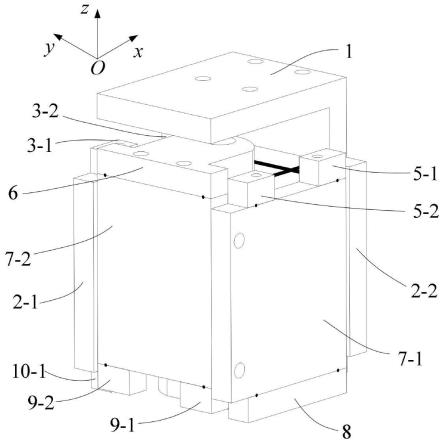
18.图1为精密测头导向机构整体结构图。
19.图2为导向机构固定部分和移动部分局部结构图。
20.图3为差动电容传感器测量原理图。
21.图4为第一不等面积极板电容传感器测量原理图。
22.图5为第二不等面积极板电容传感器测量原理图。
23.图中标记:1-垂向连接板;2-1-第一固定板;2-2-第二固定板;3-1-第一固定板第一上压板;3-2-第一固定板第二上压板;4-差动板;5-1-第一移动板第一上压板;5-2-第一移动板第二上压板;6-第二移动板上压板;7-1-第一移动板;7-2-第二移动板;8-第一移动板下压板;9-1-第二移动板第一下压板;9-2-第二移动板第二下压板;10-1-第一固定板第一下压板;10-2-第一固定板第二下压板;11-1-第二固定板第一下压板;11-2-第二固定板第二下压板;12-第一组簧片;13-第二组簧片;14-差动电容传感器;15-第一不等面积极板电容传感器静平面;16-第二不等面积极板电容传感器静平面;17-第一不等面积极板电容传感器动平面;18-第二不等面积极板电容传感器动平面;19-第一定极板;20-第二定极板;21-第三定极板;22-第四定极板;23-第一动极板;24-第二动极板;25-第三动极板;26-第四动极板。
具体实施方式
24.下面结合附图及具体实施方式对本发明作进一步的详细描述。但不应将此理解为本发明上述主题的范围仅限于以下的实施方式,凡基于本发明内容所实现的技术均属于本发明的范围。
25.如图1、图2、图3、图4和图5所示,一种精密测头导向机构6自由度数据解耦方法所基于的导向机构,包括垂向连接板1、第一固定板2-1、第二固定板2-2、第一固定板第一上压板3-1、第一固定板第二上压板3-2、差动板4、第一移动板第一上压板5-1、第一移动板第二上压板5-2、第二移动板上压板6、第一移动板7-1、第二移动板7-2、第一移动板下压板8、第二移动板第一下压板9-1、第二移动板第二下压板9-2、第一固定板第一下压板10-1、第一固定板第二下压板10-2、第二固定板第一下压板11-1、第二固定板第二下压板11-2、第一组簧片12、第二组簧片13、差动电容传感器14、第一不等面积极板电容传感器静平面15、第二不
等面积极板电容传感器静平面16、第一不等面积极板电容传感器动平面17、第二不等面积极板电容传感器动平面18、第一定极板19、第二定极板20、第三定极板21、第四定极板22、第一动极板23、第二动极板24、第三动极板25、第四动极板26。第一移动板7-1和第二移动板7-2整体通过第一组簧片12和第二组簧片13与第一固定板2-1和第二固定板2-2整体连接,使第一移动板7-1和第二移动板7-2整体能够产生相对第一固定板2-1和第二固定板2-2整体的相对移动;第一不等面积极板电容传感器静平面15和第一不等面积极板电容传感器动平面17组成第一不等面积极板电容传感器;第二不等面积极板电容传感器静平面16和第二不等面积极板电容传感器动平面18组成第二不等面积极板电容传感器;测头测针的受力可以来自任意方向,因此第一移动板7-1和第二移动板7-2整体相对于第一固定板2-1和第二固定板2-2整体的移动也是空间6自由度方向中的任意方向。
26.如图3所示,差动电容传感器14可以测量第一移动板7-1和第二移动板7-2整体沿z轴方向的线位移;第一移动板7-1和第二移动板7-2整体的6自由度移动可以引起第一不等面积极板电容传感器容值的变化,但是无法仅根据第一不等面积极板电容传感器容值的变化解耦出对应自由度的运动;第一移动板7-1和第二移动板7-2整体的6自由度移动可以引起第二不等面积极板电容传感器容值的变化,但是无法仅根据第二不等面积极板电容传感器容值的变化解耦出对应自由度的运动;将差动电容传感器14、第一不等面积极板电容传感器和第二不等面积极板电容传感器组合使用,可以解耦出对应自由度的运动。
27.如图4和图5所示,第一不等面积极板电容传感器和第二不等面积极板电容传感器中,第一定极板19、第三定极板21、第一动极板23、第二动极板24、第三动极板25和第四动极板26的面积相等,均为s1;第二定极板20和第四定极板22的面积相等,均为s2;s1》s2。
28.第一移动板7-1和第二移动板7-2整体沿x轴线位移移动δx时,第一不等面积极板电容传感器的第一定极板19和第一动极板23的容值会减小;第三定极板32和第三动极板25的容值也会减小;而第二定极板20和第二动极板24的容值,第四定极板22和第四动极板26的容值均不会发生变化。同时,第二不等面积极板电容传感器的第一定极板19和第一动极板的容值会发生变化23;第二定极板20和第二动极板24的容值会发生变化;第三定极板21和第三动极板25的容值会发生变化;第四定极板22和第四动极板26的容值会发生变化。
29.当第一移动板7-1和第二移动板7-2整体沿y轴线位移移动δy时,第一不等面积极板电容传感器的第一定极板19和第一动极板23的容值会发生变化;第二定极板20和第二动极板24的容值会发生变化;第三定极板21和第三动极板25的容值会发生变化;第四定极板22和第四动极板26的容值会发生变化。同时,第二不等面积极板电容传感器的第一定极板19和第一动极板23的容值会减小;第三定极板21和第三动极板25的容值也会减小;而第二定极板20和第二动极板24的容值,第四定极板22和第四动极板26的容值均不会发生变化。
30.当第一移动板7-1和第二移动板7-2整体沿z轴线位移移动δz时,差动电容传感器14的容值会发生变化;第一不等面积极板电容传感器的第一定极板19和第一动极板23的容值会减小;第三定极板21和第三动极板25的容值也会减小;而第二定极板20和第二动极板24的容值,第四定极板22和第四动极板26的容值均不会发生变化。同时,第二不等面积极板电容传感器的第一定极板19和第一动极板23的容值会减小;第三定极板21和第三动极板25的容值也会减小;而第二定极板20和第二动极板24的容值,第四定极板22和第四动极板26的容值均不会发生变化。
31.当第一移动板7-1和第二移动板7-2整体绕x轴角位移运动α时,第一不等面积极板电容传感器的第一定极板19和第一动极板23的容值会发生变化;第三定极板21和第三动极板25的容值会发生相反变化;而第二定极板20和第二动极板24的容值,第四定极板22和第四动极板26的容值均不会发生变化。同时,第二不等面积极板电容传感器的第一定极板19和第一动极板23的容值会减小;第三定极板21和第三动极板25的容值也会减小;而第二定极板20和第二动极板24的容值,第四定极板22和第四动极板26的容值均不会发生变化。
32.当第一移动板7-1和第二移动板7-2整体绕y轴角位移运动β时,第一不等面积极板电容传感器的第一定极板19和第一动极板23的容值会减小;第三定极板21和第三动极板25的容值也会减小;而第二定极板20和第二动极24板的容值,第四定极板22和第四动极板26的容值均不会发生变化。同时,第二不等面积极板电容传感器的第一定极板19和第一动极板23的容值会发生变化;第三定极板21和第三动极板25的容值会发生相反变化;而第二定极板20和第二动极板24的容值,第四定极板22和第四动极板26的容值均不会发生变化。
33.当第一移动板7-1和第二移动板7-2整体绕z轴角位移运动ε时,第一不等面积极板电容传感器和第二不等面积极板电容传感器的情况相同,第一定极板19和第一动极板23的容值会减小,第三定极板21和第三动极板25的容值也会减小;第二定极板20和第二动极板24的容值会发生变化;第四定极板22和第四动极板26的容值会发生相反变化。
34.根据上述位移量与电容值的变化规律,可以实现导向机构6自由度冗余数据的精确解耦。
35.对所公开实施案例的上述说明,使本领域专业技术人员能够实现或使用本发明,对本实施案例的多种修改对本领域的专业技术人员来说是显而易见的。本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施案例中体现。因此,本发明将不会被限制于本方法所示的实施案例,而是要求符合本文所公开的原理和新颖性特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1