一种基于弧形桥联臂结构的光纤法珀加速度传感器
1.本发明涉及光纤传感技术领域,具体涉及一种基于弧形桥联臂结构的光纤法珀加速度传感器。
背景技术:
2.现代科技高速发展,光纤技术的水准也在日益提升,以光纤作为媒介的传感技术也获得了蓬勃发展。光纤传感以光纤为介质,不易受电磁干扰、耐腐蚀、体积小、环境适应性较强,在传感领域得到越来越多的重视,以光纤传感为代表的传感技术也一直是重点的研发方向。
3.与传统的电类传感器相比,光纤传感器在各种恶劣环境下具有其独有的技术优势,在危险环境中可以通过光纤远程传输实现对环境的直接探测,比如矿井的易燃易爆环境下的温度压力探测,发电厂的强电磁干扰环境下的电流和电压的探测,石化产业的易爆、强腐蚀环境中的振动信号的探测。光纤传感器不仅在使用条件上优于电类传感器,同时其还具有易复用组网、远距离探测、分布式探测的优点,是诸多领域理想的传感设备。
4.光纤法珀加速度传感器是众多光纤传感器中常用的一种,除了具有光纤传感器的优点外,还具有灵敏度高、检测精度高、测量动态范围大等优点。但现有的高灵敏度、高可靠性的光纤法珀加速度传感器成本较高,很难大规模的应用。传感器的制作工艺不成熟,对于部分传感器封装工作难度较大,不能达到批量生产的要求。
技术实现要素:
5.本发明的目的是为了克服现有技术的不足,而提供一种基于弧形桥联臂结构的光纤法珀加速度传感器,能够提高加速度传感器的灵敏度和侧向抗干扰能力。
6.本发明是通过以下技术方案实现的:
7.一种基于弧形桥联臂结构的光纤法珀加速度传感器,包括单模光纤、玻璃插芯和加速度传感芯片,单模光纤插入固定在玻璃插芯中,玻璃插芯与微腔基底上表面连接在一起,单模光纤的端面与微腔基底上表面紧贴,起到光传输作用;加速度传感芯片由两层硅材料结构组成,分别为微腔基底和加速度敏感膜片;
8.所述微腔基底由单晶硅片制成,单晶硅片的下表面腐蚀有一定深度的圆柱形微腔;
9.所述加速度敏感膜片由单晶硅片制成,包括环形外框、弧形桥联臂结构膜片和加速度敏感质量块;所述圆形外框是具有一定环宽的圆环结构,其下表面与速度敏感膜片的上表面键合在一起;弧形桥联臂结构膜片位于包括环形外框轴向的中心位置,是镂空的弧形桥联臂结构的弹性膜片;加速度敏感质量块是圆柱形结构,位于弧形桥联臂结构膜片的正中间,在其两侧对称分布,用于带动弹性膜片随加速度变化上下振动;
10.所述圆柱形微腔的上表面与加速度敏感质量块的上表面作为第一个反射面和第二反射面,构成加速度敏感的法珀腔,腔长为两个反射面之间的长度;
11.所述弧形桥联臂结构是本发明的关键。弧形桥联臂结构外部与加速度敏感膜片的环形外框连接,内部与加速度敏感膜片的质量块连接。其结构的纵向刚度决定了传感器的灵敏度,其横向刚度决定了传感器的横向交叉敏感度。弧形桥联臂结构可为一级桥联结构和双级桥联结构;一级桥联结构为若干弧形臂直接连接环形外框和质量块,全部弧形臂在沿同一圆周方向等间隔分布。双级桥联结构的弧形臂分为两组,分别分布在内圈和外圈且在圆周方向上等角度间隔分布,两圈的弧形臂弯曲方向相反,双级桥联结构增加了一个近似环形的环形片结构,分别与内圈和外圈的弧形臂的一端连接,内圈弧形臂另一端与质量块连接,外圈弧形臂的另一端与环形外框连接。根据力学形变理论,弧形桥联臂结构,在同等外形尺寸下,弧形臂长度越长、臂宽度越窄、壁厚度越薄,则其纵向刚度越小,灵敏度越高;级联级数越多,臂数量越多,则其横向刚度越大,抗横向交叉敏感越强。级联级数、弧形臂个数、长度、宽度、厚度等参数的设置可随测量要求调整。在同等外形尺寸下弧形臂长度比其它连接臂长度长,在其它条件相同时可得到更优良的传感性能。
12.本发明提供的一种基于弧形桥联臂结构的光纤法珀加速度传感器,与现有的技术相比,具有如下优点:
13.1、本发明设计的一种基于弧形桥联臂结构的光纤法珀加速度传感器体积小、耐高温、易于封装、可以批量生产,适用于多场景的应用。
14.2、本发明设计了两种弧形桥联臂结构膜片:一级桥联结构和双级桥联结构。这两种结构的膜片能够提高加速度传感器的轴向灵敏度,同时减小侧向交叉灵敏度,测量精度较高。
附图说明
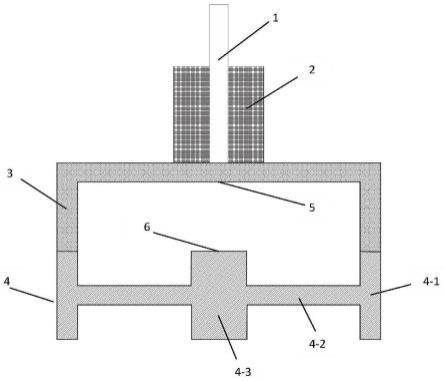
15.图1为本发明中基于弧形桥联臂结构的光纤法珀加速度传感器的结构示意图。
16.图2为本发明中弧形桥联臂结构膜片为一级桥联结构时的加速度敏感膜片的俯视图。
17.图3为本发明中弧形桥联臂结构膜片为双级桥联结构时的加速度敏感膜片的俯视图。
18.图4为本发明中加速度传感芯片的制作方法示意图。
19.图中标号含义:1为单模光纤;2为玻璃插芯;3为微腔基底;4为加速度敏感膜片;4-1为环形外框;4-2为弧形桥联臂结构膜片;4-3为加速度敏感质量块;4-4为弧形桥联臂;4-5为内圈弧形臂;4-6为外圈弧形臂;5为圆柱形微腔的上表面;6为加速度敏感质量块的上表面。
具体实施方式
20.为了使本发明的方案和优点被更清楚的理解,下面结合附图和具体实施方式对本发明作进一步详细地描述。
21.如图1所示,一种基于弧形桥联臂结构的光纤法珀加速度传感器,包括单模光纤(1)、玻璃插芯(2)和加速度传感芯片,单模光纤(1)插入固定在玻璃插芯(2)中,玻璃插芯(2)与微腔基底(3)的上表面连接在一起,单模光纤(1)的端面与微腔基底(3)的上表面紧贴,起到光传输作用;加速度传感芯片由两层硅材料结构组成,分别为微腔基底(3)和加速
度敏感膜片(4);
22.所述微腔基底(3)由单晶硅片制成,单晶硅片的底部腐蚀凹进形成一定深度的圆柱形微腔,外部形成圆形外框,腐蚀凹进部形成圆柱形微腔的上表面5;
23.所述加速度敏感膜片(4)由单晶硅片制成,包括环形外框(4-1)、弧形桥联臂结构膜片(4-2)和加速度敏感质量块(4-3);所述微腔基底3的圆形外框是具有一定环宽的圆环结构,其下表面与速度敏感膜片(4)的环形外框4-1上表面键合在一起;弧形桥联臂结构膜片(4-2)位于包括环形外框(4-1)轴向的中心位置,是镂空的弧形桥联臂结构的弹性膜片;加速度敏感质量块(4-3)是圆柱形结构,位于弧形桥联臂结构膜片(4-2)的正中间,在其上下两侧对称分布,用于带动弹性膜片随加速度变化上下振动,加速度敏感质量块4-3的顶部形成加速度敏感质量块的上表面6;
24.所述圆柱形微腔的上表面(5)与加速度敏感质量块(4-3)的上表面(6)作为第一个反射面和第二反射面,构成加速度敏感的法珀腔,腔长为两个反射面之间的长度;
25.所述弧形桥联臂结构是本发明的关键。弧形桥联臂结构外部与加速度敏感膜片4的环形外框(4-1)连接,内部与加速度敏感膜片的质量块(4-3)连接。其结构的纵向刚度决定了传感器的灵敏度,其横向刚度决定了传感器的横向交叉敏感度。弧形桥联臂结构可为一级桥联结构(如图2)和双级桥联结构(如图3);一级桥联结构为若干弧形桥联臂(4-4)直接连接环形外框(4-1)和质量块(4-3),全部弧形臂在沿同一圆周方向等间隔分布。双级桥联结构的弧形臂分为两组,分别分布在内圈和外圈且在圆周方向上等角度间隔分布,两圈的弧形臂弯曲方向相反,双级桥联结构增加了一个近似环形的环形片结构,分别与内圈和外圈的弧形臂的一端连接,内圈弧形臂(4-5)另一端与质量块(4-3)连接,外圈弧形臂(4-6)的另一端与环形外框(4-1)连接。根据力学形变理论,弧形桥联臂结构,在同等外形尺寸下,弧形臂长度越长、臂宽度越窄、壁厚度越薄,则其纵向刚度越小,灵敏度越高;级联级数越多,臂数量越多,则其横向刚度越大,抗横向交叉敏感越强。级联级数、弧形臂个数、长度、宽度、厚度等参数的设置可随测量要求调整。在同等外形尺寸下弧形臂长度比其它连接臂长度长,在其它条件相同时可得到更优良的传感性能。
26.作为本发明的一种实施方式:弧形桥联臂结构膜片为一级桥联结构的情况下,当弧形桥联臂结构膜片的半径为6mm、厚度为20μm、六个弧形臂宽均为0.95mm、上下两侧加速度敏感质量块的半径均为1.3mm、厚度均为177.5μm时,仿真结果得出光纤法珀加速度传感器测量灵敏度为1.9584μm/g;在传感器侧向和轴向分别施加1g加速度时,侧向灵敏度与轴向灵敏度之比为9.4
×
10-8
。
27.作为本发明第二种实施方式:弧形桥联臂结构膜片为双级桥联结构的情况下,当弧形桥联臂结构膜片的半径为6mm、厚度为20μm、内圈六个弧形臂宽均为0.26mm、外圈六个弧形臂宽均为0.38mm、上下两侧加速度敏感质量块的半径均为1.3mm、厚度均为177.5μm时,仿真结果得出光纤法珀加速度传感器测量灵敏度为10.106μm/g;在侧向和轴向分别施加1g加速度时,侧向灵敏度与轴向灵敏度之比为1.3
×
10-6
。
28.如图4所示为本发明中加速度传感芯片的制作方法示意图,具体包括如下步骤:准备一片双面抛光的圆形硅片,在硅片表面涂覆光刻胶,如图4a所示;放置1号掩膜版,刻蚀出一个圆柱形微腔,去除剩余部分的光刻胶,完成微腔基底(3)的制作,如图4b-4c所示;准备另一片双面抛光的单晶硅片,在其表面涂覆一层光刻胶,放置2号掩膜版,刻蚀出一个具有
一定深度的圆环腔结构,去除剩余部分的光刻胶,如图4d-4f所示;将第一片硅片刻蚀的一面与第二片硅片刻蚀圆环腔的一面键合在一起,如图4g所示;在第二片硅片的另一表面涂覆一层光刻胶,放置2号掩膜版,刻蚀出一个对称的圆环腔结构,硅片中心留下的对称圆柱形结构为加速度敏感质量块(4-3),如图4h-4i所示;在剩余的薄硅膜片的表面涂覆一层光刻胶,放置带有单圈或双圈结构的弧形桥联臂图案的掩膜版,刻蚀出镂空的结构,去除剩余部分的光刻胶,形成弧形桥联臂结构膜片(4-2),最终完成所述的加速度传感芯片的制作,如图4j-4l所示。
29.最后应当说明的是,本发明说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。以上实施例仅用以说明本发明的技术方案而非限制,尽管参照上述实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1