激光雷达的制作方法
1.本技术涉及雷达探测技术领域,尤其涉及一种激光雷达。
背景技术:
2.激光雷达是以发射激光来实现探测目标的距离、位置和/或速度等特征信息的系统。其工作原理是向目标发射探测光线,然后将接收到的从目标反射回来的回波光线与探测光线进行光电转换后再进行比较,以获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数中的一种或多种,从而对目标进行探测、跟踪和/或识别。
3.随着激光雷达的小型化要求越来越高,激光雷达内各元件模块的结构设计和安装布局越来越影响激光雷达的装调精度和效率以及整机尺寸。而装调精度和效率直接影响激光雷达的测距性能和生产效率。因此,在满足小型化需求的同时如何能够提高或保持激光雷达内部元件的装调精度和效率,成为业界的重要需求。
技术实现要素:
4.有鉴于此,本技术提供一种激光雷达,通过结构设计和/或安装布局提高激光雷达的测距性能和/或装调精度和效率。
5.本技术各实施例提供的激光雷达,包括外壳以及收容在所述外壳内的收发装置、振镜装置和转镜装置。所述外壳包括外壳底座,所述收发装置、振镜装置和转镜装置安装在所述外壳底座上。所述外壳沿水平的第一方向设有相对的外壳前端和外壳后端,所述外壳前端设有允许激光通过的窗口镜。所述收发装置用于发射探测光线以及回收并探测回波光线,所述振镜装置包括振镜电机和与所述振镜电机连接的反射镜,所述反射镜面向所述收发装置和所述转镜装置设置以实现所述收发装置和所述转镜装置之间的光线转向传播,其中,在水平的第二方向上,所述收发装置位于所述振镜电机和所述转镜装置之间,其中所述第二方向与所述第一方向垂直。
6.激光雷达包括收发装置、振镜装置和转镜装置,振镜装置的振镜电机、收发装置和转镜装置在水平第二方向上布置,可有效降低激光雷达在竖直方向的高度,同时水平布置更有利于提高内部各元件的装调精度和效率。
7.在一些实施例中,所述收发装置定义一与所述探测光线平行的纵向轴线,所述收发装置在所述纵向轴线上具有相对的收发装置前端和收发装置后端,所述收发装置前端与所述外壳前端的距离大于所述外壳后端与所述外壳后端的距离,所述振镜装置和所述转镜装置靠近所述外壳前端设置。在总体水平方向布置的情况下,通过协调各元件的前后位置,让收发装置靠后端设置,使振镜装置的反射镜的位置和角度设计有更大的优化空间,以实现光线在收发装置和转镜装置之间更高精度的转向传播。
8.在一些实施例中,所述振镜电机定义一电机轴线,所述电机轴线与所述收发装置的纵向轴线之间形成一小于90度的第一夹角,所述转镜装置位于所述第一夹角之外。
9.在一些实施例中,所述电机轴线与所述外壳前端的底边缘之间形成一大于 90度
且小于180度的第二夹角,所述转镜装置位于所述第二夹角之内,所述底边缘与所述第二方向平行。
10.在一些实施例中,所述激光雷达包括收容在所述外壳内的激光源装置,所述激光源装置包括光纤激光器,所述光纤激光器安装在所述外壳底座上并靠近所述外壳前端,其中,在所述第二方向上,所述转镜装置位于所述收发装置和所述光纤激光器之间。
11.在一些实施例中,所述激光源装置包括光纤耦合分束装置和光纤走线装置,所述光纤耦合分束装置在第三方向上安装在所述光纤激光器顶部,所述第三方向垂直于所述第一方向和所述第二方向,所述光纤走线装置安装在所述底座上并靠近所述外壳后端,从靠近所述光线耦合分束装置的位置延伸至靠近所述收发装置的位置。
12.在一些实施例中,所述激光雷达包括一减震底座,所述减震底座利用多个减震器安装在所述外壳底座上,所述减震底座与所述外壳底座在第三方向上间隔一距离,所述第三方向垂直于所述第一方向和所述第二方向;其中,所述收发装置、所述振镜装置和所述转镜装置都安装在所述减震底座上,以利用所述减震底座整体安装至所述外壳底座。
13.在一些实施例中,所述减震底座沿所述第二方向设有相对的减震底座第一端和减震底座第二端,所述减震底座包括位于所述减震底座第一端的振镜装置安装部、位于所述减震底座第二端的转镜装置安装部、以及位于所述振镜装置安装部和所述转镜装置安装部之间的收发装置安装部,多个所述减震器中的至少一个与所述减震底座第一端连接,多个所述减震器中的至少另外两个与所述减震底座第二端连接。
14.在一些实施例中,所述减震底座及其上支撑的收发装置、振镜装置和转镜装置共同构成的组件具有一质心,多个所述减震器的支撑点位形成的图形几何中心在所述第三方向上与所述质心对齐,并位于所述质心的上方。
15.在一些实施例中,所述减震底座设有一装配基准面,所述装配基准面面向所述外壳前端。
16.通过在减震底座上设置装配基准面,在将减震底座安装到激光雷达外壳时,可以使装配基准面与相邻外部元件的平面(比如,激光雷达外壳的一对应基准面)平行,从而对减震底座的初始安装位置形成定位效果,方便减震底座的安装和定位,简化装调程序,提高装配速度。
17.在一些实施例中,所述收发装置包括外壳、探测光线准直组件、主波光线散射组件、光线收集组件和光线探测组件。所述探测光线准直组件用于准直并发射探测光线至所述振镜装置;所述主波光线散射组件用于散射主波光线;所述光线收集组件用于收集所述回波光线,并将所收集的回波光线传输至所述光线探测组件;所述光线探测组件用于接收所述光线探测组件传输的回波光线和所述主波光线散射组件散射的主波光线,并将光信号转换为电信号。其中,所述探测光线准直组件、所述主波光线散射组件、所述光线收集组件和所述光线探测组件固定安装至所述外壳以形成单一收发模块。
18.上述实施例中,探测光线准直组件、主波光线散射组件、光线收集组件和光线探测组件都固定在外壳上,与外壳形成单一收发装置。该单一收发装置集成了探测光线的准直发射、回波光线的接收和探测,以及主波光线的散射、接收和探测。在装配至激光雷达壳体内之前,各组件已经按照设计精度装配在一起形成单一收发模块后。在激光雷达整机中,该收发装置即可根据整机需要任意调整其位置和姿态,都可以保证收发装置各组件之间的装
配精度,使得收发装置在激光雷达产品内的布局能够更加灵活,能够配合更加优化的光路设计。经过模块化设计后,结构紧凑,有利于减小了收发装置的体积,提高装调效率,降低生产成本。
19.在一些实施例中,所述转镜装置包括外壳、电机、转镜、一级速度监测装置和二级速度监测装置。外壳设有收容空间。电机位于所述收容空间内,所述电机包括相对所述外壳固定的定子以及能够相对所述定子旋转的外转子。转镜位于所述收容空间内并固定于所述外转子上以随所述外转子旋转。一级速度监测装置包括监测光电和采样位,所述采样位能够随所述外转子旋转,所述监测光电监测所述采样位的旋转位置从而监测所述外转子的旋转速度。二级速度监测装置包括光栅码盘和编码器,所述光栅码盘固定设置在所述外转子上以随所述外转子旋转,所述编码器监测所述光栅码盘上的光栅以实时监测所述外转子的角位移。
20.上述实施例中,电机为外转子电机,其相比于内转子电机,转镜可以直接固定在外转子上以跟随外转子旋转,不需要多次转接,有效减小了公差尺寸链,保证电机的旋转精度,使转镜装置能够满足高精度的光学使用要求;而且外转子电机的转动惯量更大,因此能够带动更大的转镜进行高速旋转。通过监测光电与采样位的一级速度监测,以及光栅码盘和编码器的二级速度监测,可以高精度的实时掌握电机的转动情况,通过控制中心对速度的分析,再对速度进行控制,即可实现对电机转速的高精度闭环监控。除此之外,在光栅码盘上设置有零位信息,除可监控转子的转速外,还可利用该零位信息掌握电机转子旋转时的实时方位位置信息。因此,控制中心就可以更加精确地将点云中的图像点与转子的绝对角度对应起来,从而提高点云成像地稳定性。
21.在一些实施例中,所述转镜装置包括外壳、电机和转镜。外壳呈筒状,并设有收容空间、出风口以及避让部。电机位于所述收容空间内,所述电机包括相对所述外壳固定的定子以及能相对所述定子旋转的外转子。转镜位于所述收容空间内并固定于所述外转子上以随所述外转子旋转,所述转镜的外表面与所述外壳的内表面相间隔以在二者之间形成缝隙,所述出风口与所述缝隙连通以在所述转镜旋转时将所述缝隙内的气流导出所述外壳,所述避让部暴露所述转镜以允许所述转镜能够反射探测光线至目标体以及接收从所述目标体反射回的回波光线。
22.由于转镜收容在外壳的收容空间内,而外壳又呈筒状,因此外壳能够对转镜形成更全面的保护效果,以降低转镜损坏的风险。外转子带转镜旋转时,转镜与外壳之间的缝隙内的空气可以从出风口排出,减小了转镜在旋转过程中受到的空气阻力,从而降低风噪和电机的功耗。
附图说明
23.图1是本技术一实施例的激光雷达的立体组合图。
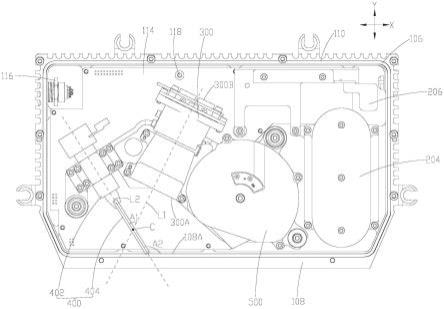
24.图2使图1的激光雷达内部结构的俯视图。
25.图3是图2的激光雷达内部结构的立体组合图。
26.图4是图3的激光雷达的光纤走线装置的立体图。
27.图5是减震底座的立体图。
28.图6是一激光雷达部分内部结构的主视图。
29.图7为本技术一实施例的收发装置的原理框图。
30.图8是本技术一实施例的激光雷达的收发装置的立体分解图。
31.图9是图8的收发装置的剖视图,其角度相对于图8的角度绕轴向偏转90 度。
32.图10是图8的收发装置的探测光线准直组件的立体放大图。
33.图11是图8的收发装置的光纤支架的立体放大图。
34.图12是图8中圈vi部分的放大图。
35.图13是图8的收发装置另一角度的组合状态的侧视图。
36.图14是图3中激光雷达内部结构的振镜装置的立体图。
37.图15是图14的振镜装置的横截面示意图。
38.图16是本技术一实施例提供的转镜装置的结构示意图。
39.图17为图16中所示转镜装置另一视角的示意图。
40.图18为图16中所示转镜装置的剖视示意图。
41.图19为图18中所示压板的结构示意图。
42.图20为本发明一实施例提供的转镜装置的结构示意图。
43.图21为图20中所示一级速度监测装置的结构示意图。
44.图22为图20中所示上盖的结构示意图。
45.图23为本技术一实施例提供的底座与编码器的装配示意图。
46.图24是本技术另一实施例提供的转镜装置的结构示意图。
47.元件标号说明:
48.外壳100、外壳底座102、上壳104、密封条106、外壳前端108、底边缘108a、外壳后端110、窗口镜112、电路板114、电气接插件116、检磁器件118。
49.激光源装置200、光纤激光器202、光纤耦合分束装置204和光纤走线装置 206、走线支架208、走线限位件210、第一光纤布置限位结构212、第二光纤布置限位结构214。
50.收发装置300、收发装置前端300a、收发装置后端300b、外壳302、窗口 301、第一外壳端303、第二外壳端304、纵向轴线l1、内部通道305、开口306、第一外壳部307、第二外壳部308、第三外壳部309、安装口310、挡板311、安装孔312、第一台阶313a、第二台阶313b、安装槽314、凸台316、定位销317、螺纹孔318、外壳螺纹孔319、第一接收镜片361、第二接收镜片362、压圈363、滤光片364、通光孔365、光阑366、固定槽367、探测光线准直组件320、发射底座321、发射准直镜322、光纤定位件323、光纤324、遮光罩325、安装筒 326、间隔327、主波光线散射组件340、主波光纤341、散射元件342、光纤支架343、光纤插芯344、散射元件安装部345、插芯安装部346、安装平面347、光纤容纳槽349、支架底座350、支架上盖351、底座基板352、底座安装部353、上盖基板354、上盖安装部355、沟槽356、侧缘357、通孔358、光线探测组件 380、连接套筒381、连接孔382、紧固件383,388,395、探测器电路板384、探测器385、安装支架386、电路板通孔387、间隔柱389、安装凸台390、轴向通孔391、支架通孔393、套筒螺纹孔394、安装法兰396、第一缺口部397、第二缺口部398。
51.振镜装置400、振镜电机402、反射镜404、电机轴线l2、第一夹角a1、第二夹角a2。
52.转镜装置500外壳510、电机530、转镜550、收容空间511、出风口512、缝隙551、底座513、上盖514、底板515、下围壁516、盖板517、上围壁518、圆角519、避让部521、装配基准面523、安装孔524、定子531、外转子532、固定轴533、定子线圈534、转子轭535、磁钢536、轴承
537、弹簧538、压板 539、凸出部541、橡胶垫543、一级速度监测装置570、监测光电571、采样位 572、信号传输线573、监测电路板574、凹槽525、通孔526、二级速度监测装置590、光栅码盘591、编码器592、编码器电路板593、编码器检测头594、凹设部527、凸台528、插孔529、码盘安装件596。
53.减震底座600、减震器602、减震底座第一端604、减震底座第二端606、振镜装置安装部608、转镜装置安装部610、收发装置安装部612、图形几何中心o、质心m、装配基准面614、安装孔616、底板618、下圆角622、围壁620、出风口624。
具体实施方式
54.下面,结合附图以及具体实施方式,对本技术做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
55.需要说明的是,本技术实施例中所有方向性指示(诸如上、下、左、右、前、后、内、外、顶部、底部
……
)仅用于解释在某一特定姿态(如附图所示) 下各部件之间的相对位置关系等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
56.还需要说明的是,当元件被称为“固定于”或“设置于”另一个元件上时,该元件可以直接在另一个元件上或者可能同时存在居中元件。当一个元件被称为“连接”另一个元件,它可以是直接连接另一个元件或者可能同时存在居中元件。
57.总的来说,本技术各实施例提供了一种激光雷达,包括外壳以及收容在所述外壳内的收发装置、振镜装置和转镜装置。所述外壳包括外壳底座,所述收发装置、振镜装置和转镜装置安装在所述外壳底座上。所述外壳沿水平的第一方向设有相对的外壳前端和外壳后端,所述外壳前端设有允许激光通过的窗口镜。所述收发装置用于发射探测光线以及回收并探测回波光线,所述振镜装置包括振镜电机和与所述振镜电机连接的反射镜,所述反射镜面向所述收发装置和所述转镜装置设置以实现所述收发装置和所述转镜装置之间的光线转向传播,其中,在水平的第二方向上,所述收发装置位于所述振镜电机和所述转镜装置之间,其中所述第二方向与所述第一方向垂直。
58.激光雷达包括收发装置、振镜装置和转镜装置,振镜装置的振镜电机、收发装置和转镜装置在水平第二方向上布置,可有效降低激光雷达在竖直方向的高度,同时水平布置更有利于提高内部各元件的装调精度和效率。
59.以下以举例的方式对该激光雷达的各组件进行具体说明。
60.图1是激光雷达一实施例的立体组合图,图2是图1的激光雷达的内部结构俯视图,图3是图2的内部结构的立体图。请参照图1至图3,该激光雷达包括外壳100以及收容在外壳内的激光源装置200、收发装置300、振镜装置400 和转镜装置500。
61.外壳100包括外壳底座102和上壳104,上壳104与外壳底座102固定,其间形成收容空间,收容激光雷达的内部元件。上壳104和外壳底座102的固定方式例如是螺丝紧固连接。上壳104和外壳底座102之间也可以设置密封条106,以实现外壳100的防水防尘密封。外壳100可采用散热性佳的材料制成,例如金属,以及时散发内部元件运行产生的热量。
62.外壳100具有相对的外壳前端108和外壳后端110,该外壳前端108设有允许激光通过的窗口镜112。外壳前端108和外壳后端110沿水平的第一方向y设置,以激光雷达产品正
常安装状态而言,即前后方向设置。在所示的实施例中,上壳104的前端可设有安装槽,窗口镜112安装在安装槽内,通过密封胶与上壳104密封紧固连接。窗口镜112设计成仅允许预定波长范围内的光通过,对其余波长段的光有效过滤,减小杂散光对激光雷达探测性能的影响。例如,该预定波长范围可为1500-1600nm。实际应用中可根据选定激光的工作波长来确定该预定波长范围。
63.外壳底座102上设有电路板114,外壳100上固定连接有电气接插件116,电气插接件116与电路板114电性连接,作为外部信息处理单元(图未示)的连接接口。
64.外壳100还可设有开盖保护装置,用于保护激光在使用过程中的安全性,防止产品在未安装上壳104时进行工作并造成意外伤害。在一些实施例中,开盖保护装置可包括固定到上壳104上的磁感组(图未示)和位于电路板114上的检磁器件118。磁感组与检磁器件118配合实现开盖保护功能。在一些实施例中,上壳104与外壳底座102有效安装时(即,紧固连接)时,电路板114上的磁检器件118检测到磁感组,激光雷达正常工作。当上壳104与外壳底座102 未有效安装时,电路板114上的检磁器件118无法检测到磁感组,激光雷达产品无法正常工作。在此,可以将电路板114上的检磁器件118与磁感组的距离在设定范围内时识别为上壳104与外壳底座102呈有效安装状态,该设定范围例如为1-2mm内。即,当检测到检测器件118与磁感组之间的距离大于该设定范围时,则视为未检测到磁感组。当上壳104与外壳底座102未有效安装时,电路板114上的检磁器件118无法检测到磁感组,产品无法正常工作,这样可以有效保护激光在使用过程中的安全性,防止产品在未有效安装上壳104时进行工作并造成意外伤害。
65.激光源装置200用于提供激光雷达所需要的激光。在所示的实施例中,激光源装置200包括光纤激光器202、光纤耦合分束装置204和光纤走线装置206。光纤激光器202用于产生激光,可根据所需要的性能参数选择现有的光纤激光器。在所示的实施例中,光纤激光器202安装在外壳底座102上并靠近外壳前端108。在与第一方向y垂直且也是水平的第二方向x上,转镜装置500位于收发装置300和光纤激光器200之间。在正常激光雷达安装状态,第二方向x 一般为水平的左右方向。
66.光纤耦合分束装置204将光纤激光器202产生的激光分成多束,形成多路光纤324输入至收发装置500,以提供多路探测光线,提高激光雷达探测精度。该器件属于现有技术,因此其工作原理和构造在此不再赘述。光纤耦合分束装置204在第三方向z上安装在光纤激光器202顶部,其中,第三方向z垂直于第一方向y和第二方向x。在正常激光雷达安装状态,第三方向z一般为竖直方向。
67.如图2、图3和图4,光纤走线装置206用于从光纤耦合分束装置204引出的光纤324的走线,对光纤324在传播路径上起到限位与保护作用。光纤走线装置206安装在外壳底座102上并靠近外壳后端110,从靠近光线耦合分束装置 204的位置延伸至靠近收发装置500的位置。在所示的实施例中,光纤走线装置 206包括走线支架208和走线限位件210。走线支架208紧固到外壳底座102,例如通过自身结构和螺丝。走线限位件210紧固到走线支架208上,例如通过自身结构和螺丝。走线支架208上设置有第一光纤布置限位结构212,走线限位件上设置有第二光纤布置限位结构214,均在光纤324的走线路径上对光纤布置起到引导与限位作用。光纤布置限位结构的形式不限,可以为走线槽,限位柱,绕线柱等。作为举例,所示的实施例中,第一光纤布置限位结构212为板材弯折行程的走线槽,第二光纤布置限位结
构214为限位柱。
68.再参考图2和图3,收发装置300接收激光源装置200提供的激光后,用于发射探测光线以及回收并探测回波光线。振镜装置400用于将收发装置300发射的探测光纤反射至转镜装置500,以及将转镜装置500反射回的回波光线反射至收发装置300。转镜装置500用于将振镜装置400反射的探测光纤反射至探测物上,并接收从探测物上发射回的回波光线。
69.在激光雷达领域,振镜装置400和转镜装置500共同构成激光雷达的扫描模块。收发装置300发射的一路或多路激光首先到达振镜装置400,激光在振镜装置内实现反射,然后到达转镜装置500。激光在振镜装置400内实现光路在垂直方向一定角度范围内的往复扫描,激光在转镜装置400内实现光路在水平方向一定角度范围内的往复扫描。经过转镜装置500后的激光出射到被测目标后漫反射回到收发装置300,收发装置300实现激光回波接收,控制中心通过测距计算得出目标点位距离,当出射点位足够覆盖被测目标主要特征时,控制中心即可识别出目标外形及目标距离。
70.振镜装置400包括振镜电机402和与振镜电机402连接的反射镜404,反射镜404面向收发装置300和转镜装置500设置以实现收发装置300和转镜装置 500之间的光线转向传播。在水平的第二方向x上,收发装置300位于振镜电机402和转镜装置404之间。振镜装置400的振镜电机402、收发装置300和转镜装置500在水平第二方向上布置,可有效降低激光雷达在竖直方向的高度,同时水平布置更有利于提高内部各元件的装调精度和效率。
71.在所示的实施例中,从整体布局来看,在第二方向x上或者左右方向上,从左至右分别为振镜电机402、收发装置300、转镜装置500、光纤激光器202;振镜装置400、转镜装置500、光纤激光器202和光纤耦合分束装置204靠近外壳前端108,而收发装置300和光纤走线装置206靠近外壳后端110。在总体水平方向布置的情况下,通过协调各元件的前后位置,让收发装置300靠后端设置,使振镜装置400的反射镜402的位置和角度设计有更大的优化空间,以实现光线在收发装置300和转镜装置500之间更高精度的转向传播。
72.收发装置300定义一纵向轴线l1,该纵向轴线l1与其发射的探测光纤平行。收发装置300在纵向轴线l1上具有相对的收发装置前端300a和收发装置后端300b。收发装置前端300a与外壳前端108的距离大于收发装置后端300b 与外壳后端110的距离,即收发装置300靠近外壳后端110设置,而振镜装置 400和转镜装置500靠近外壳前端108设置。
73.振镜电机402定义一电机轴线l2,电机轴线l2与收发装置300的纵向轴线l1之间形成一小于90度的第一夹角a1,转镜装置500位于第一夹角a1之外。纵向轴线l1和电机轴线l2相交于点c,在本文中,第一夹角a1是指点c 沿纵向轴线l1向收发装置300发射的射线与点c沿电机轴线l2向振镜电机402 发射的射线之间构成的夹角。
74.另一方面,电机轴线l2与外壳前端108与第二方向x平行的底边缘108a 之间形成一大于90度且小于180度的第二夹角a2,转镜装置500位于该第二夹角a2之内。电机轴线l2和底边缘108a相交于点d,在本文中,第二夹角 a2是指点d沿电机轴线l2向振镜电机402发射的射线与点d沿第二方向x向右(如果振镜装置400和转镜装置500的左右关系对调,则改为沿第二方向x 向左)发射的射线之间的夹角。
75.参考图5和图6,激光雷达包括一减震底座600,减震底座600利用多个减震器602安装在外壳底座102上,收发装置300、振镜装置400和转镜装置500 都安装在减震底座600上,以利用减震底座600整体安装至外壳底座102。减震底座600与外壳底座102在第三方向z上
间隔一距离,即相对于外壳底座102,减震底座600是悬空的,两者之间的唯一物理连接是依靠多个减震器602,因此减震底座600与外壳100是振动隔离的。由此,可避免或减少外壳100的任何振动或冲击传递至收发装置300、振镜装置400和转镜装置500,提高产品的抗震性能,从而提高雷达测距性能。
76.减震底座600沿第二方向x设有相对的减震底座第一端604和减震底座第二端606,减震底座600包括位于减震底座第一端604的振镜装置安装部608、位于减震底座第二端606的转镜装置安装部610、以及位于振镜装置安装部608 和转镜装置安装部610之间的收发装置安装部612。
77.在所示的实施例中,设置有三个减震器602,一个与减震底座第一端604连接,另外两个与减震底座第二端606连接。在其他实施例中,减震器602的数量可多余三个,多个减震器602中的至少一个与减震底座第一端604连接,多个减震器602中的至少另外两个与减震底座第二端606连接。
78.同时参考图2和图6,减震底座600及其上支撑的收发装置300、振镜装置 400和转镜装置500共同构成的组件具有一质心m,多个减震器602的支撑点位形成的图形几何中心o在第三方向z上与上述质心m对齐,并位于上述质心m 的上方。上述组件的质心m低于减震器602的支撑点位形成的图形几何中心o,可以使得转镜组件500更加稳定的运转,防止其发生偏摆造成不想要的机械震动和噪音。
79.如图5,减震底座600设有一装配基准面614,装配基准面614面向外壳前端108。装配基准面614用于对减震底座600的初始位置形成定位。在所示的实施例中,装配基准面614为平面。通过在减震底座600上设置装配基准面614,在将减震底座600安装到激光雷达外壳时,可以使装配基准面614与相邻外部元件的平面(比如,激光雷达外壳的一对应基准面)平行,从而对减震底座600 的初始安装位置形成定位效果,方便减震底座600的安装和定位,简化装调程序,提高装配速度。由于收发装置300、振镜装置400和转镜装置500安装至减震底座600使得三者之间的位置关系精确装调后,通过减震底座600统一安装至外壳底座102,因此一旦减震底座600定位精确,则其承载的收发装置300、振镜装置400和转镜装置500都会定位精确。
80.装配基准面614的具体位置不进行限定,在本实施例中,装配基准面614 面向外壳前端108设置。为方便定位工装的安装,装配基准面614上设有用于与定位工装连接的安装孔616或其他连接定位结构。
81.下面结合图7-13介绍收发装置的具体实施方式,结合图14和图15介绍振镜装置的具体实施方式,结合图16-24介绍转镜装置的具体实施方式。
82.收发装置300
83.激光雷达的收发装置作为激光雷达核心部件,直接影响激光雷达的内部结构布局及测距性能指标,收发装置涉及各种元器件,其装调精度和效率直接影响激光雷达的测距性能和生产效率。因此,如何提高收发装置的装调精度和效率,成为业界的重要需求。
84.本技术各实施例提供的收发装置包括外壳、探测光线准直组件、主波光线散射组件、光线收集组件和光线探测组件。其中,探测光线准直组件用于准直并发射探测光线至激光雷达的扫描装置。主波光线散射组件用于散射主波光线。光线收集组件用于收集扫描装置反射的回波光线,并将所收集的回波光线传输至光线探测组件。光线探测组件用于接收
光线收集组件传输的回波光线和所述主波光线散射组件散射的主波光线,并将光信号转换为电信号。其中,所述探测光线准直组件、所述主波光线散射组件、所述光线收集组件和所述光线探测组件固定安装至所述外壳以形成单一收发模块。如此,本技术激光雷达的收发装置的各组件固定在外壳上,与外壳形成单一收发装置。该单一收发装置集成了探测光线的准直发射、回波光线的接收和探测,以及主波光线的散射、接收和探测。各组件一旦按照设计精度装配在一起形成单一收发模块后,在激光雷达整机中,该收发模块即可根据整机需要任意调整其位置和姿态,而不用担心收发装置各组件之间的装配精度变化,使得收发装置在激光雷达产品内的布局能够更加灵活,能够配合更加优化的光路设计。经过模块化设计后,结构紧凑,有利于减小了收发装置的体积,提高装调效率,降低生产成本。
85.以下以举例的方式对该收发装置的各组件进行具体说明。
86.图7是该收发装置的原理框图。如图7,收发装置主要包括探测光线准直组件、主波光线散射组件、光线收集组件和光线探测组件。探测光线准直组件从激光源装置接收探测光线,主波光线散射组件从激光源装置接收主波光线。探测光纤准直组件接收激光源装置提供的探测光线,准直并发射探测光线至扫描装置。扫描装置将探测光线导向至目标物,从目标物反射回的回波光线再经过扫描装置导向至收发装置的光线收集组件。光线收集组件将回波光线传输至光线探测组件。主波光线散射组件接收激光源装置提供的主波光线,并将接收的主波光线向光线探测组件散射。光线探测组件同时接收光线收集组件传输的回波光线和主波光线散射组件散射的主波光线,将光信号转换为电信号,并将得到的电信号传输至信号处理系统进行处理以得到目标物的距离、速度和/或三维等信息,从而对目标物进行探测、跟踪和/或识别。
87.图8和图9示出了收发装置300一实施例的具体结构,其中图8为收发装置300的立体分解图,图9为图8的收发装置300各元件装配后的剖视图。
88.如图8和图9,所示的收发装置300主要包括外壳302、探测光线准直组件 320、主波光线散射组件340、光线收集组件和光线探测组件380,其中探测光线准直组件320、主波光线散射组件340、光线收集组件和光线探测组件380固定安装至外壳302以形成单一收发模块。
89.在所示的实施例中,外壳302包括相互远离的第一外壳端303和第二外壳端304。第一外壳端303设置在收发装置前端300a,第二外壳端304设置在收发装置后端300b。外壳302内部在其第一外壳端303和第二外壳端304之间形成一供光线传递的内部通道305。探测光线准直组件320设置在内部通道305,用于从第一外壳端303朝远离第二外壳端304的方向发射探测光线,而光线探测组件380固定安装至第二外壳端304。光线收集组件设置在第一外壳端303和光线探测组件380的探测器385之间,用于收集并传输回波光线至光线探测组件380的探测器385。
90.在所示的实施例中,从第一外壳端303到第二外壳端304的方向定义为轴向(即回波光线在内部通道305内的传播方向),收发装置300的纵向轴线l1 与该轴向平行。外壳302在轴向上依次包括靠近第一外壳端303的第一外壳部 307、与第一外壳部307连接的第二外壳部308和与第二外壳部308连接并靠近第二外壳端304的第三外壳部309。第一外壳部307的外轮廓垂直于轴向的横截面呈矩形,且在轴向上具有一致的横截面积。第二外壳部308连接在第一外壳部307和第三外壳部309之间,其外轮廓垂直于轴向的横截面也呈矩形,但其
横截面积在从第一外壳部307至第三外壳部309的方向上逐渐减小。第三外壳部309的外轮廓垂直于轴向的横截面呈圆形,且在轴向上具有一致的横截面积。也就是说,第一外壳部307总体上为中空的棱柱,第二外壳部308总体上为中空的棱台,第三外壳部309总体上为中空的圆柱,其外表面为圆柱面。虽然外壳302在此被例示为具有不同外轮廓的三个外壳部,应当理解这些具体结构仅仅是以举例方式进行描述本技术,而不应对本技术构成限制,因此在其他实施例中,外壳302也可以具有不同的外形。
91.如图8,外壳302的侧面还设有一安装口310和一用于封闭安装口310的挡板311。安装口310贯穿外壳302的壁部。未被挡板311封闭时,该安装口310 可供内部通道305内的元件装配提供操作和观察窗口。在所示的实施例中,安装口310贯穿第二外壳部308的壁部。在其他实施例中,安装口310也可以设置在外壳302的其他合适部位,只要能够提供元件装配的操作和观察窗口即可。
92.外壳302的外部还设有用以安装至激光雷达装置内的安装部。在图8和图9 所示的示例中,安装部为从外壳302的外表面延伸出的凸耳,凸耳设有安装孔312,如此即可利用紧固件穿过安装孔312进而将收发装置300固定在激光雷达内部,例如激光雷达的底座上。本实施例中,外壳302安装至减震底座600的收发装置安装部612。收发装置安装部612设置有与上述安装孔312配合的安装结构,例如螺孔、凸柱等。在其他实施例中,安装部也可以采用其他形式,只要能将收发装置300固定安装在激光雷达内部即可。
93.第一外壳端303具有开口306,方便外壳302的内部通道305内的元件装配。第二外壳端304设有与内部通道305连通的窗口301,该窗口301允许内部通道 305内的回波光线通过进而传播至光线探测组件380的探测器385(后面再详细描述)。
94.光线收集组件包括设置于外壳302内部通道305的一个或多个接收镜片,接收镜片将回波光线传输至光线探测组件380的探测器385上。在图8和图9 的示例中,包括两个接收镜片,即第一接收镜片361和第二接收镜片362,其中第一接收镜片361的直径大于第二接收镜片362的直径,第一接收镜片361设置在靠近或位于第一外壳端303的位置,第二接收镜片362设置在靠近或位于第二外壳端304的位置,且第一接收镜片361和第二接收镜片362的中心轴线重合。在其他实施例中,可以仅设置一个接收镜片或多余两个的接收镜片。当只设置一个接收镜片时,该接收镜片可设置在靠近或位于第一外壳端303的位置。当设置多余两个的接收镜片时,两个接收镜片可分别设置在靠近或位于第一外壳端303和第二外壳端304的位置,而其余接收镜片设置在上述两个接收镜片之间。
95.接收镜片可以采用任何合适的方式安装至外壳302的内部通道305。仅仅作为举例,在所示的实施例中,外壳302的内表面在第一外壳部307和第二外壳部308交界处设有第一台阶313a,第一接收镜片361利用该第一台阶313a限位,并点胶固定。第一接收镜片361具有矩形外轮廓,与第一外壳部307的内壁面形状适配。第一接收镜片361还设有开槽,该开槽是用于固定探测光线准直组件320,将在后面详细描述。外壳302内表面在靠近第二外壳端304位置处设有第二台阶313b,第二接收镜片362利用该第二台阶313b限位,并利用一压圈363将第二接收镜片362压在该第二台阶313b上进行固定。
96.为了去除发射激光波长范围之外的光线,降低环境光和杂散光对回波光线接收的影响,在一些实施例中,还可以在内部通道305设置滤光片364。在图8 和图9的示例中,滤光片364固定安装在第一外壳端303的开口306中。也就是说,滤光片364设置在内部通道305的
最前端,在所述回波光线的传播路径上,接收镜片位于滤光片364下游,即回波光线先经过滤光片364再到达接收镜片。这样设置的其中一个优点是,由于光束在内部通道305中传播时光线角度较大,而在最前端时,光线角度最小,此时进行滤光,滤光效果会更好。在滤光片364设有一通光孔365,该通光孔365允许探测光线准直组件320发射的探测光线通过。如此,滤光片364既可以滤除发射激光波长范围之外的光线,又不对探测光线的发射形成阻碍。
97.为了进一步降低杂散光,在一些实施例中,还可以在接收镜片与探测器385 之间设置光阑366。因此,在一些具体实施例中,光线收集组件可以包括在扫描装置和探测器385之间依次设置的滤光片364、一个或多个接收镜片361,362 以及光阑366。光阑366将在后面结合光线探测组件380来具体介绍。
98.探测光线准直组件320将激光源装置提供的激光(即探测光线)准直并发射至激光雷达的扫描装置。同时参考图10,为一例示性的探测光线准直组件320 的立体放大分解图,该探测光线准直组件320包括发射底座321、发射准直镜 322、光纤定位件323、光纤324、遮光罩325。发射准直镜322和光纤定位件323固定安装在发射底座321上,光纤324出射光线的端部固定至光纤定位件 323,光纤324将激光源装置提供的激光射向发射准直镜322准直后,向激光雷达的扫描装置发射。
99.在所示的具体构造中,发射底座321具有相对的两端,一端设有安装筒326,发射准直镜322固定在该安装筒326内;光纤定位件323固定在发射底座321 的另一端,并与发射准直镜322之间形成间隔327。具体安装过程可以是,发射准直镜322放置在发射底座321第一端的安装筒326内,光纤定位件放置在发射底座321的另一端,通过装调相对位置使得激光发射角满足要求后,点胶固定。遮光罩325遮住该间隔327,防止灰尘污染光纤324出光端面,同时防止光纤324端面出射光直接散射至光线探测组件380。
100.光纤定位件323可以是任何合适的将光纤324相对于发射准直镜322定位的元件,在所示的实施例中,光纤定位件323被实施为光纤v型槽。光纤v型槽是一种常用的光纤定位件323,因此其光纤定位原理及具体结构不在此展开描述。光纤定位件323中夹持一路或多路光纤324,优选多路光纤324,这将有利于提高激光雷达分辨率。在采用多路光纤324的情况下,多路光纤324在光纤定位件323中按一定间距竖直排列,光纤324的出光端面设置于发射准直镜322 的焦平面,多路光纤324出射的多路光线通过发射准直镜322后,形成多路与发射准直镜322的光轴成一定夹角的发射光线,发射至扫描模块。图8和图9 所示的实施例中,光纤耦合分束装置204将光纤激光器202的光纤分成四路光纤324,在其他实施例中也可以采用更多或更少路的光纤324。
101.发射底座321固定设置在外壳302的内部通道305内,以便于探测光线准直组件320从第一外壳端303向外稳定地发射探测光线。发射底座321设置在靠近第一外壳端303的位置,在所示的实施例中,发射底座321固定在第一接收镜片361上,从而将探测光线准直组件320固定在第一接收镜片361上。在一个具体的固定方式中,第一接收镜片361设有穿透其轴向两侧的固定槽367,发射底座321固定在固定槽367中。该发射底座321与固定槽367可以是间隙配合;如此,可调节发射底座321与第一接收镜片361之间的相对位置。当调整到使发射准直镜322的光轴和第一接收镜片361的光轴之间的夹角满足预定关系后,发射底座321和固定槽367之间点胶固定。固定槽367从第一接收镜片361的边缘朝向第一接收镜片361的光学中心沿伸(即,径向向内延伸),发射底座321固定在该固定槽367靠近该光学中心的槽底
部。在另一些具体的固定方式中,第一接收镜片361也可以在靠近其光学中心的位置形成固定孔,发射底座321固定在该固定孔中,同样可起到将该探测光线准直组件320固定在第一接收镜片361的作用。
102.所示的实施例中设置第一接收镜片361和第二接收镜片362,发射底座321 固定在靠近第一外壳端303的第一接收镜片361上。在设置仅仅一个接收镜片或多余两个接收镜片的实施例中,发射底座321可固定至位于或靠近第一外壳端303设置的那个接收镜片上,以减少发射光线在内部通道305的传播距离。在上述的实施例中,发射底座321都是固定在接收镜片上,应当理解的是这仅仅是定位发射底座321的一种具体实施方式。在其他实施例中,发射底座321 也可以通过其他元件定位在内部通道305中。例如,内部通道305中还可以设置额外的定位元件来定位发射底座321。
103.主波光线散射组件340将激光源装置提供的主波光线散射至光线探测组件 380,从而探测器385同时接收回波光线和主波光线。具体而言,激光源装置通过光纤来提供主波光线,主波光线通过散射方式散射至光线探测组件380的探测器385。该主波光线可以直接散射至光线探测组件380的探测器385,即不需要经过其他光学元件;也可以通过其他光学元件,例如光学透镜,进行汇聚后传输至探测器385。
104.图8和图9的示例中,主波光线被光线收集组件收集后再传输至探测器385。如图8和图9,主波光线散射组件340包括有主波光纤341和散射元件342。主波光纤341用于向外壳302的内部通道305发射主波光线。散射元件342相对于外壳302固定在内部通道305内,用于接收主波光线并将所接收的主波光线散射至光线探测组件380。具体而言,散射元件342位于第一接收镜片361和第二接收镜片362之间,用于将所接收的主波光线散射至第二接收镜片362并经第二接收镜片362传输至光线探测组件380。
105.更具体而言,主波光线散射组件340包括光纤支架343、光纤插芯344和所述散射元件342。光纤支架343固定在外壳302上,并伸入外壳302的内部通道 305。主波光纤341固定在光纤插芯344中,光纤插芯344固定安装在光纤支架 343上,从而将主波光纤341固定。散射元件342固定设置在光纤支架343上。光纤插芯344定位成使得主波光线朝向散射元件342的散射面发射主波光线。
106.同时参考图11,光纤支架343上设有散射元件安装部345和插芯安装部346。散射元件342固定安装在散射元件安装部345上。在所示的具体结构中,散射元件安装部345是从光纤支架343主体结构中延伸出的一个凸块,该凸块具有一个安装平面347,散射元件342为一个毛玻璃块,毛玻璃块通过粘结剂粘附到该安装平面347上。在其他实施例中,散射元件342也可以是表面经过磨砂处理的其他结构件,只要其表面能散射主波光线即可。
107.光纤插芯344插接在插芯安装部346中。在所示的具体结构中,插芯安装部346是从光纤支架343主体结构延伸出的一个凸块,该凸块设有贯穿的插孔,光纤插芯344插入该插孔内,让光纤插芯344内的主波光纤341正对所述散射元件342的散射面。在其他实施例中,插芯安装部346还可以是其他结构,以其他方式固定光纤插芯344。
108.在以上实施例中,实现主波光线散射功能的各元件,例如光纤插芯344和散射元件342,都支撑在光纤支架343上。在其他实施例中,散射元件342也可以不支撑在光纤支架343上。
109.另外,在一些实施方式中,光线支架还可以设有光纤容纳槽349,用以容纳探测光
线准直组件320的光纤324,对探测光线准直组件320的光纤324提供保护作用。探测光线准直组件320的光纤324穿过该光纤容纳槽349进入外壳302 的内部通道305,进而到达光纤定位件323进行定位。以下对这种实施方式进行举例说明。应当理解的是,这样的光纤容纳槽349也可以不设置在光纤支架343 上,而可由独立于光纤支架343的其他元件形成。
110.如图8、图9和图11,光纤容纳槽349朝向探测光线准直组件320,更具体而言,朝向探测光线准直组件320的光纤定位件323弯曲延伸,光纤324容纳在光纤容纳槽349内并被光纤容纳槽349导向至光纤定位件323。在所示的具体结构中,光纤支架343包括支架底座350和支架上盖351,支架上盖351扣合在支架底座350上,该光纤容纳槽349形成在支架底座350和支架上盖351之间。更具体而言,支架底座350包括一底座基板352及形成在底座基板352一端的底座安装部353;支架上盖351包括一上盖基板354及形成在上盖基板354一端的上盖安装部355。底座基板352形成一弯曲延伸的沟槽356,该沟槽356面向上盖基板354的一侧为开放侧,且沟槽356两端在底座基板352的两端形成开口。支架上盖351扣合到支架底座350后,上盖基板354即覆盖底座基板352 的沟槽356,即封闭沟槽356面向上盖基板354的开放侧,从而在所述沟槽356 的位置形成光纤容纳槽349,光纤容纳槽349在光纤支架343的两端具有开口。
111.光纤支架343具有一朝向光纤定位件323弯曲延伸的侧缘357,散射元件安装部345和插芯安装部346沿该侧缘357间隔设置。在所示的具体结构中,侧缘357形成在底座基板352上,沟槽356沿着该侧缘357弯曲延伸。
112.该底座安装部353固定安装至外壳302的外侧,以将支架底座350固定至外壳302;该上盖安装部355固定安装至外壳302的外侧,以将支架上盖351固定至外壳302。在一实施方式中,外壳302设有一贯穿外壳302的壁部的安装槽 314,光纤支架343从外壳302的外侧穿过安装槽314伸入到外壳302的内部通道305。插芯安装座346与该安装槽314正对。该安装槽314提供了插芯安装部 346和/或光纤插芯344穿过外壳302的壁部的通道,插芯安装部346可以完全位于外壳302的内部通道305,也可以部分穿过安装槽314而位于外壳302的外侧,只要能让光纤插芯344插入插芯安装部346即可。底座安装部353和上盖安装部355分别固定安装至外壳302在安装槽314两相对侧的部位。如此,该光纤支架343的一端被固定安装至外壳302的外侧。在所示的具体结构中,底座安装部353为自底座基板352的一端沿远离上盖基板354的方向弯折延伸的底座安装片,而上盖安装部355为自上盖基板354的一端沿远离底座基板352 的方向弯折延伸的上盖安装片。
113.结合图12,外壳302在安装槽314两相对侧的部位分别设有两个凸台316,而底座安装部353和上盖安装部355分别固定安装至两个所述凸台316上。底座安装片和上盖安装片与凸台316之间设置有连接结构,例如销孔配合结构或螺钉螺孔配合结构。同时参考图12,在该具体结构中,每个凸台316上设有一个定位销317和一个螺纹孔318,底座安装片和上盖安装片每个都设有两个通孔 358,其中一个通孔收容定位销317,紧固件359如螺钉穿过另一个通孔358并与凸台316上对应的螺纹孔318螺纹连接。
114.该安装槽314的至少一部分沿轴向延伸至第三外壳部309。在所示的具体结构中,安装槽314全部设置在第三外壳部309上。具体而言,安装槽314从第二外壳部308和第三外壳部309交接的部位在第三外壳部309上沿轴向延伸。两个凸台316设置在第三外壳部309上,且与第二外壳部308紧邻。第二外壳部308上的安装口310位于第一外壳端303和安装槽
314之间。在所示的具体构造中,在未被挡板311封闭时,安装口310与安装槽314在轴向上连通,而在垂直于轴向的宽度上,安装口310的宽度大于安装槽314的宽度。该实施例通过设置安装口310与安装槽314连通,在安装主波光线散射组件340时,可以让主波光线散射组件340从较大的安装口310进入外壳302的内部通道305,然后横向移动至较窄的安装槽314位置进行固定,也避免了光学元件从狭窄的安装槽314插入至外壳302内部导致元件刮伤甚至损坏的问题。拆卸主波光线散射组件340时,可以原路返回,避免直接从狭窄的安装槽314退出导致光学元件刮伤升值损坏的问题。同时也可以提高拆装效率。
115.请参考图8和图9,光线探测组件380接收回波光线和主波光线,将光信号转换为电信号。光线探测组件380利用一连接套筒381与外壳302固定连接。在所示的实施例中,该连接套筒381固定套接在第三外壳部309上。在一实施方式中,连接套筒381的筒壁上设有连接孔382,第三外壳部309的壁部上对应设有外壳螺纹孔319,紧固件383例如螺丝穿过连接孔382与外壳螺纹孔319螺纹连接以将连接套筒381固定至第三外壳部309上。连接孔382的孔径至少在一个方向上大于外壳螺纹孔319的孔径,使得在紧固件383将连接套筒381紧固至第三外壳部309之前,连接套筒381和第三外壳部309之间的相对位置关系是可以调节的。在所示的实施例中,连接孔382的孔径在第三外壳部309的轴向和周向上都大于外壳螺纹孔319的孔径,因此连接套筒381和第三外壳部309在轴向和周向上的位置关系都可以相对调整。由此,光线探测组件380可以相对于光线收集组件进行调整。具体而言,该连接孔382为腰形孔,该腰形孔的长度方向与轴向平行,腰形孔的宽度和长度都大于螺纹孔319的直径,且第三外壳部309的外配合面为圆柱面,连接套筒381的内配合面也为圆柱面,因此在被紧固件383紧固之前,连接套筒381和第三外壳部309可以沿其配合面相对转动或平移。为便于说明,上述及下述描述中引入了“孔径”来描述一些孔的大小,如果孔是非圆形的,非圆形孔的孔径应该理解为通过该孔几何中心的孔的尺寸;由于是非圆形,所以其孔尺寸在不同角度或方向上可能是不同的。例如,以腰形孔而言,其定义长度方向和宽度方向,其长度可以理解为长度方向上的孔径,宽度可以理解为宽度方向上的孔径。
116.光线探测组件380包括探测器电路板384和安装在探测器电路板384上的探测器385,探测器电路板384与一安装支架386固定连接,而安装支架386与连接套筒381固定连接。因此,当连接套筒381相对于第三外壳部309进行位置调整时,即同时带动探测器385相对于光线收集组件的调整。探测器385可以采用任何合适类型的探测器385,例如apd(雪崩光电二极管)探测器385,其利用apd载流子的雪崩倍增效应放大光电信号,以提高检测的灵敏度。探测器385、探测器电路板384以及他们之间的连接及详细工作原理可参考现有技术,在此不展开描述。
117.在所示的固定方式中,探测器电路板384设有电路板通孔387,安装支架 386对应设有支架螺纹孔,紧固件388例如螺丝穿过电路板通孔387与支架螺纹孔螺纹连接以将探测器电路板384固定至安装支架386上。在所示的具体结构中,探测器电路板384在其四角落位置设有四个电路板通孔387,安装支架386 对应位置设有四个间隔柱389,支架螺纹孔设置在间隔柱389内,紧固件388穿过电路板通孔387与对应的支架螺纹孔螺纹连接,即可将探测器电路板384紧固至安装支架386。在其他实施例中,可以使用更多或更少的紧固件来固定探测器电路板384和安装支架386,电路板通孔和支架螺纹孔也可以设置在其他部位。另外,在其他实施例中,也可以采用其他合适的方式来固定探测器电路板384 和安装支架386。
118.安装支架386也呈板状,间隔柱389固定在安装支架386和探测器电路板 384之间,以将安装支架386与探测器电路板384间隔开。在所示的实施例中,光阑366安装在安装支架386上,正对探测器385。光阑366的作用是减少杂散光进入探测器385,可有效降低杂散光对接收性能的影响。光阑366设有多个孔,用于让主波光线和多路回波光线通过。光阑366与探测器385在轴向上的距离可为0.3mm至1.0mm之间。为了实现如此小的距离间隔,安装支架386正对探测器385的部位设有一安装凸台390,光阑366通过点胶固定至安装凸台390面对探测器385的一侧。该安装凸台390设有一轴向通孔391,该轴向通孔391与第二外壳端304的窗口313正对,并与光阑366正对。如此,外壳302的内部通道305的主波光线和回波光线即可依次穿过第二外壳端304的窗口313、安装凸台390的轴向通孔391、光阑366的孔进而到达探测器385。在所示的具体结构中,安装凸台390在面对探测器385的一侧设有一形状与光阑366外形匹配的凹陷,光阑366容纳在该凹陷内,可对光阑366在周向上有效定位。
119.安装支架386设有支架通孔393,连接套筒381对应设有套筒螺纹孔394,紧固件395例如螺丝穿过支架通孔393与套筒螺纹孔394螺纹连接以将安装支架386固定至连接套筒381上。其中,支架通孔393的孔径大于对应套筒螺纹孔394的孔径,使得在紧固件395将安装支架386紧固至连接套筒381之前,安装支架386和连接套筒381之间的相对位置关系是可以调节的。具体而言,安装支架386和连接套筒381可以相对转动或平移。在所示的实施例中,支架通孔393与对应套筒螺纹孔394的孔径差值大于安装支架386和连接套筒381 之间的相对位置调节量,如此可以保证能够从任何偏差位置调整到合适位置,从而提高元件装调有效性。在所示的具体结构中,安装支架386在其四个角落位置设有四个支架通孔393,连接套筒381在面对安装支架386的一端设有一安装法兰396,四个螺纹孔设置在该安装法兰396的四个角落位置,与安装支架 386的支架通孔393位置对应,紧固件395穿过支架通孔393与套筒螺纹孔394 螺纹连接即可将安装支架386固定至连接套筒381上。在其他实施例中,通孔和螺纹孔也可以采用其他布局方式,或者采用其他合适的连接方式。
120.安装支架386与连接套筒381、连接套筒381与外壳302之间都可相对移动,因此可通过装调使得各路回波光线分别聚焦到对应的探测器385感光面上。上述实施例中介绍的装调方式简单易操作,从而可提高收发装置300的装调效率。
121.连接套筒381远离探测器385的一端设有一缺口,该缺口与外壳302的安装槽314正对。如图8和图13所示的实施例中,该缺口包括第一缺口部397和第二缺口部398,第一缺口部397位于最外端,第一缺口部397和第二缺口部 398在轴向上连通。在连接套筒381的周向上,第一缺口部397的周向宽度大于第二缺口部398的周向宽度。用于安装光纤支架343的两个凸台316收容在第一缺口部397中,而第二缺口与安装槽314正对。在装配过程中,第二缺口部 398与安装槽314正对,暴露出插芯安装部346,以便能够从外壳302的外部将光纤插芯344插入插芯安装部346内。具有一宽一窄的两个缺口部仅仅是一种具体实施方式,在其他实施例中,缺口也可以只具有单一宽度,或者缺口也可以不收容凸台316。
122.综上所述,本技术实施例提供的激光雷达的收发装置中,探测光线准直组件、主波光线散射组件、光线收集组件和光线探测组件都固定在外壳上,与外壳形成单一收发装置。该单一收发装置集成了探测光线的准直发射、回波光线的接收和探测,以及主波光线的散射、接收和探测。在装配至激光雷达壳体内之前,各组件已经按照设计精度装配在一起形成单一收发模块后。在激光雷达整机中,该收发装置即可根据整机需要任意调整其位置和姿
态,都可以保证收发装置各组件之间的装配精度,使得收发装置在激光雷达产品内的布局能够更加灵活,能够配合更加优化的光路设计。经过模块化设计后,结构紧凑,有利于减小了收发装置的体积,提高装调效率,降低生产成本。
123.振镜装置400
124.结合图5和图14,例示了振镜装置400安装至减震底座600的安装结构示意图。
125.在所示的实施例中,振镜电机402利用电机安装座406和电机压块408安装至减震底座600上。具体而言,电机安装座406固定至振镜装置安装部608 的安装凹陷609中(见图5),例如,减震底座600在安装凹陷609周围设有螺纹孔,电机安装座406上对应设有通孔,通过螺丝410穿过通孔拧入对应的螺纹孔中固定。电机压块408固定至电机安装座406上,使得振镜电机402夹持在电机安装座406和电机压块408之间。减震底座600上设置有振镜电机六个自由度一定的调节量,来实现振镜装置400相对于其他部件位置的精确调节。电机压块408固定至电机安装座406上的其中一种方式可以是,例如,电机安装座406设有螺纹孔,电机压块408对应设有通孔,通过螺丝412穿过通孔拧入对应的螺纹孔中固定。
126.如图15,电机安装座406的上表面设有与振镜电机402外轮廓配合的第一半圆弧面414。电机压块408上设置有与振镜电机402外轮廓配合的第二半圆弧面416。第一半圆弧面414和第二半圆弧面416在竖直方向具有预设的偏心距离 h,在所示的实施例中,该偏心距离h可以是0.5mm~1.0mm。该偏心距离h的设置可有效帮助电机压块408实现振镜电机402的夹紧固定。
127.转镜装置500
128.图16至图23是以安装至减震底座600的独立转镜装置作为例子进行描述,图24是以转镜装置的部分壳体与减震底座600一体成型的例子进行描述,两者主要结构一致,可以相互参考。
129.请参阅图16至图18,本技术一实施例提供的转镜装置500包括外壳510、电机530以及转镜550,外壳510开设有收容空间511,电机530和转镜550都位于收容空间511内,转镜550与电机530连接,以在电机530的驱动下进行旋转。
130.外壳510呈筒状,收容空间511的形状与外壳510的形状相同,即收容空间511也呈筒状,转镜550位于收容空间511内。筒状的外壳510,相比于其它的形状例如摇篮状或碗状的外壳510,能够对转镜550形成更全面的保护,以降低转镜550损坏的风险。
131.外壳510设有出风口512,出风口512沿外壳510的径向贯穿外壳510。转镜550的外表面与外壳510的内表面相间隔,从而在转镜550与外壳510之间形成缝隙551,出风口512与缝隙551连通以在转镜550旋转时将缝隙551内的气流导出外壳510。由于外壳510呈筒状,且缝隙551本身较小,因此转镜550 在旋转过程中空气阻力会比较大。通过在外壳510上设置出风口512,出风口 512可以将转镜550旋转时形成的气流排出外壳510,有效减小了转镜550在旋转过程中遇到的空气阻力,从而降低电机530的功耗和风噪。
132.出风口512的具体位置不进行限定,在本实施例中,出风口512设置在外壳510的周向壁即外壳510在周向上的侧壁,转镜550在周向上的外表面与外壳510在周向上的内表面之间存在缝隙551。将出风口512设置在外壳510的周向壁上,可以使转镜550在旋转时周向空气流通顺畅,从而降低转镜550旋转时遇到的空气阻力。
133.出风口512的具体数量不进行限定,在本实施例中,出风口512的数量为多个,多个
出风口512沿外壳510的周向间隔分布成若干行。通过设置多个出风口512并使其间隔排布,可以使缝隙551内的气流就近从相应的出风口512 排出,有效降低转镜550气流的流速,进而降低风噪和空气阻力。
134.出风口512的具体形状不进行限定,在本实施例中,出风口512呈矩形,并沿外壳510的周向延伸。
135.可以理解地,外壳510可以是一体成型,也可以是由多个部分组装而成。在本实施例中,外壳510包括底座513和固定至底座513的上盖514,底座513 和上盖514围合形成收容空间511。通过将外壳510分为底座513和上盖514两部分,方便在组装过程中将电机530安装在外壳510的内部。
136.底座513和上盖514的具体形状不进行限定,例如,二者可以都是筒状或半筒状(即筒状沿其中心轴分成两半形状),也可以是其中一个为筒状,另一个为板状,只要底座513和上盖514组装在一起后能够形成筒状外壳510即可。
137.在图16和图17所示的实施例中,底座513包括底板515和自底板515外周向上盖514延伸的下围壁516,上盖514包括盖板517和自盖板517外周向底座513延伸的上围壁518,底板515、下围壁516、上围壁518以及盖板517围合形成收容空间511,上围壁518和下围壁516固定在一起共同形成外壳510的周向壁,出风口512设于上围壁518和/或下围壁516。此时底座513和上盖514 都呈筒状。
138.在另一实施例中,底座513包括底板和自底板外周向上盖514延伸的下围壁,底板、下围壁以及上盖514围合形成收容空间511,下围壁形成外壳510的周向壁,出风口512设于下围壁。此时底座513呈筒状,上盖514可以是筒状,也可以是板状。
139.在又一实施例中,上盖514包括盖板和自盖板外周向底座513延伸的上围壁,底座513、上围壁以及盖板围合形成收容空间511,上围壁形成外壳510的周向壁,出风口512设于上围壁。此时上盖514呈筒状,底座513可以是筒状,也可以是板状。
140.在本实施例中,上围壁518和下围壁516分别设有多个出风口512。位于上围壁518的多个出风口512沿上盖514的周向间隔分布,位于下围壁516的多个出风口512沿底座513的周向间隔分布。位于下围壁516的多个出风口512 与位于上围壁518的多个出风口512在外壳510的轴向上相间隔。具体地,上围壁518和下围壁516上都设有三个出风口512,但在其他实施例中可设置其他数目的出风口512。
141.如图18所示,在一些实施例中,外壳510在轴向上的内表面与外壳510在周向上的内表面的连接处呈弧形过渡以形成一圆角519。连接处形成圆角519有利于空气在该处的顺滑流动,相对尖角,可显著减小空气在该处的扰动,从而降低风阻和风噪。具体地,底板515的内表面与下围壁516的内表面弧形过渡以形成圆角519,同样,上围壁518的内表面与盖板517的内表面也弧形过渡。
142.如图16所示,外壳510上设有避让部521,避让部521暴露转镜550以允许转镜550能够反射探测光线至目标以及接收从目标反射回来的回波光线。通过在外壳510上设置避让部521,可避免外壳510影响探测光线和回波光线的传播。
143.可以理解地,避让部521可以是外壳510上由透明材料形成的区域,也可以是设置在外壳510上的窗口,只要不影响探测光线和回波光线的传播即可。在本实施例中,避让部521为设于外壳510的周向壁上的窗口,该窗口连通收容空间511,底板515的内表面和下围
壁516的内表面的连接处进行圆角处理的部位延伸至窗口处,以与外壳510的外部连通。
144.在本实施例中,上盖514和底座513分别设有窗口部,位于上盖514的窗口部与位于底座513的窗口部相对并连通,从而形成窗口。在外壳510的轴向上,窗口的高度大于转镜550的厚度。具体地,位于上盖514的窗口部开设于上围壁518,位于下盖的窗口部开设于下围壁516。通过在上围壁518和下围壁 516上都设置窗口部,且两个窗口部形成的窗口的高度大于转镜550的厚度,保证有效的光学路径不会被底座513和上盖514遮挡,也即,保证探测光线和回波光线不会被底座513和上盖514挡住。
145.如图16所示,外壳510的外侧设有用于对转镜550的初始位置形成定位的装配基准面523,所述装配基准面523为平面。通过在外壳510上设置装配基准面523,在将转镜装置500安装到激光雷达外壳时,可以使装配基准面523与相邻外部元件的平面(比如,激光雷达外壳的一对应基准面)平行,从而对转镜 550的初始安装位置形成定位效果,方便转镜装置500的安装,简化装调程序,提高装配速度。
146.装配基准面523的具体位置不进行限定,在本实施例中,装配基准面523 设于底座513位于窗口位置的一段平面。为方便定位工装的安装,装配基准面 523上设有与定位工装配合的安装孔524。
147.请参阅图18,在一些实施例中,电机530包括定子531和外转子532,定子531相对外壳510固定,外转子532则能相对定子531旋转,转镜550固定在外转子532上,以随外转子532一起旋转。电机530为外转子电机,外转子电机相比于内转子电机,外转子532位于定子531的外侧,因此转镜550可以直接固定在外转子532上,不需要进行多次转接,有效减小了公差尺寸链,保证电机530的旋转精度,以满足高精度的光学使用要求。而且外转子电机的转动惯量比内转子电机的转动惯量大,因此,电机530可以带动更大的转镜550 实现高速旋转。
148.定子531包括固定轴533和安装在固定轴533外周的定子线圈534,固定轴 533的轴向两端分别与底座513和上盖514连接固定,使得固定轴533的两端分别被底座513和上盖514支撑,也即,由底座513和上盖514支撑定子531的全部重量。具体地,定子线圈534环设于固定轴533的外周并通过胶水固定,固定轴533的两端分别通过螺丝与盖板517和底板515固定连接,而上围壁518 又与下围壁516固定连接,因此可以增强了固定轴533的稳定性,使外转子532 在相对定子531旋转时运行更平稳。
149.外转子532包括转子轭535和磁钢536,转子轭535能够相对定子531旋转,磁钢536安装在转子轭535的内周面,即靠近定子线圈534的一侧,磁钢536 与定子线圈534之间具有气隙。具体地,转子轭535套设在定子531的外周,并与固定轴533转动连接,转镜550固定连接于转子轭535的外侧。当定子线圈534内通入电流产生电磁场时,磁钢536就能在定子线圈534的作用下进行旋转,并带动转子轭535和转镜550一起旋转。
150.转子轭535与固定轴533转动连接的具体方式不进行限定,在本实施例中,外转子532包括轴承537,轴承537位于固定轴533与转子轭535之间。轴承537与转子轭535固定连接、与固定轴533转动连接,从而实现固定轴533和转子轭535的转动连接。轴承537的具体地数量不进行限定,具体地,轴承537 设有两个,两个轴承537沿固定轴533的轴向间隔分布。
151.轴承537与盖板517之间设有弹簧538,该弹簧538呈压缩状态。弹簧538 的弹力作用在轴承537上可以对轴承537形成预压,从而在轴向上对外转子532 形成一定的限位效果,使外转子532能够在定子线圈534和磁钢536的相互作用下绕固定轴533旋转。
152.请参阅图18和图19,在一些实施例中,转镜装置500包括压板539,压板 539能够沿轴向将转镜550抵压在外转子532上,使转镜550相对外转子532固定,从而使得转镜550能够随外转子532旋转。具体地,转镜550呈中空状,并环绕在转子轭535的外侧。转镜550的内侧设有凸出部541,压板539在与转子轭535固定连接时,就会将凸出部541压紧在转子轭535上,从而实现转镜 550和外转子532相对固定的效果。
153.转镜550的具体形状不进行限定,可以采用常用的棱镜,例如,可以是正多面体状或异性多面体状。
154.压板539与凸出部541之间设有橡胶垫543,橡胶垫543能够产生形变,具有缓冲效果,通过计算橡胶垫543的压缩量和压板539与凸出部541在轴向上的间隙量,可以避免压板539将凸出部541压紧在转子轭535上时因压力过大而损坏转镜550。
155.请参阅图19至图22,在一些实施例中,转镜装置500包括一级速度监测装置570,一级速度监测装置570包括监测光电571和采样位572,采样位572能够随外转子532旋转,监测光电571监测采样位572的旋转位置从而监测外转子532的旋转速度。外转子532在相对定子531旋转时,会带动采样位572一起运动,当采样位572运动至监测光电571处后,监测光电571就能监测到采样位572,并根据采样位572监测外转子532的旋转速度。
156.采样位572由一个或多个沿圆周方向布置的挡片或缺口形成,该挡片或缺口形成在压板539上,从而使采样位572能够跟随外转子532一起旋转。在本实施例中,采样位572为设置在压板539上的一个挡片。采样位572可以更多,不同数量适应不同的控制方案,理论上数量越多能实现的角度细分精度越高,相应的速度监控精度越高。
157.监测光电571包括间隔相对设置的光线发射器和接收器,采样位572跟随外转子532旋转时能够从光线发射器和接收器之间穿过。具体地,光线发射器和接收器设置在上盖514上。当挡片跟随外转子532运动至光线发射器和接收器之间时,挡片就会阻断由光线发射器朝向接收器发射的光线,也即,接收器不会接收到来自光线发射器的光线,监测光电571即可监测到挡片此时位于光线发射器和接收器之间。
158.一级速度监测装置570还包括信号传输线573和与信号传输线573电连接的监测电路板574,监测光电571电连接在监测电路板574上。上盖514的外侧设有凹槽525,凹槽525内设有与收容空间511连通的通孔526,监测电路板574 和信号传输线573位于凹槽525内,监测光电571穿过通孔526伸进收容空间 511内。
159.请参阅图18和图23,在一些实施例中,转镜装置500包括二级速度监测装置590,二级速度监测装置590与一级速度监测装置570在轴向上相互间隔。二级速度监测装置590包括光栅码盘591和编码器592,光栅码盘591固定设置在外转子532上以随外转子532旋转,编码器592监测光栅码盘591上的光栅以实时监测外转子532的角位移。具体地,光栅码盘591与外转子532同轴设置,编码器592固定在底座513上,当外转子532相对定子531旋转时,光栅码盘 591就会相对编码器592旋转,在旋转过程中,编码器592就会监测到光栅码盘 591上不同的光栅,达到监测外转子532角位移从而达到监控电机530转速的效果。
160.光栅码盘591上刻有一定数量的光栅数,根据监测精度不同,光栅数也可以不同,例如可为200~5000,光栅数越多,检测精度越高,因此可根据检测精度要求合理进行选择。在本实施例中,光栅码盘591的光栅数为1500线,每线对应角度为360/1500=0.24
°
。
161.通过光栅码盘591的光栅数来实现旋转角度检测的细分,比其它的转速监测方式,
例如霍尔配合磁钢极数的方式实现的旋转角度的细分,精度提高。以8 极对的磁钢和霍尔为例,其可实现的角度细分为360/8=45
°
,0.24
°
和45
°
相差甚大。通过监测光电571与采样位572的一级速度监测,以及光栅码盘591 和编码器592的二级速度监测,可以高精度的实时掌握电机530的转动情况,通过控制中心对速度的分析,再对速度进行控制,即可实现对电机530转速的高精度闭环监控。除此之外,在光栅码盘591上设置有零位信息,除可监控外转子532的转速外,还可利用该零位信息掌握电机530的外转子532旋转时的实时方位位置信息。因此,控制中心就可以更加精确地将点云中的图像点与外转子532的绝对角度对应起来,从而提高点云成像地稳定性。
162.编码器592包括编码器电路板593和编码器检测头594,编码器电路板593 与底座513固定连接,编码器检测头594电连接在编码器电路板593靠近光栅码盘591的一侧,以用于监测光栅码盘591上的光栅。具体地,编码器检测头 594与光栅码盘591在轴向上的距离为0.5mm至1.5mm,以避免因距离过大或过小而影响检测的有效进行。
163.底座513设有凹设部527,凹设部527与收容空间511连通,编码器电路板 593固定安装在凹设部527内。通过在底座513上设置容纳编码器电路板593的凹设部527,可方便编码器592的安装。
164.凹设部527的中部设有凸台528,固定轴533固定安装至凸台528。编码器电路板593上对应设有穿孔,以供凸台528穿过。具体地,凸台528的中部设有插孔529,固定轴533的一端插入插孔529内。在组装过程中,凸台528能够对固定轴533和编码器592形成一定的限位效果,以便进行固定操作。
165.转子轭535上安装有码盘安装件596,光栅码盘591固定于码盘安装件596 上。码盘安装件596与转子轭535和光栅码盘591之间的具体连接方式不进行限定,在本实施例中,码盘安装件596粘贴于转子轭535面对底座513的端面上,光栅码盘591粘贴于码盘安装件596面对底座513的端面上,也即,光栅码盘591通过码盘安装件596固定至转子轭535靠近底座513的端面上。粘贴固定方式操作简单,方便组装。
166.图24例示了转镜装置的部分壳体与减震底座一体成型的实施例。如图24 所示,与图16至图23的实施例不一致的地方在于,转镜装置外壳的底座与减震底座600一体成型,减震底座600上设有装配基准面614和安装孔616,如前所述,这有利于减震底座600和转镜装置等元件初始位置的定位。结合图5,与减震底座600一体成型的转镜装置外壳的底座包括底板618和自底板618一体向上延伸的下围壁620,底板618的内表面与下围壁620的内表面弧形过渡以形成圆角622,如前所述,该圆角622有利于气流平滑流动,降低噪音。作为转镜装置外壳的一部分,下围壁620上也设有出风口624,如前所述,出风口624可以将转镜旋转时形成的气流及时排出外壳,有效减小了转镜在旋转过程中遇到的空气阻力,从而降低电机的功耗和风噪。其余结构一致,可以参考前述实施例的描述,在此不再赘述。
167.本技术实施例中的转镜装置,转镜收容在外壳的收容空间内,而外壳又呈筒状,因此外壳能够对转镜形成更全面的保护效果,以降低转镜损坏的风险。外转子带转镜旋转时,转镜与外壳之间的缝隙内的空气可以从出风口排出,减小了转镜在旋转过程中受到的空气阻力,从而降低风噪和电机的功耗。
168.另一方面,本技术实施例的转镜装置,电机为外转子电机,其相比于内转子电机,转镜可以直接固定在外转子上以跟随外转子旋转,不需要多次转接,有效减小了公差尺寸
链,保证电机的旋转精度,使转镜装置能够满足高精度的光学使用要求;而且外转子电机的转动惯量更大,因此能够带动更大的转镜进行高速旋转。通过监测光电与采样位的一级速度监测,以及光栅码盘和编码器的二级速度监测,可以高精度的实时掌握电机的转动情况,通过控制中心对速度的分析,再对速度进行控制,即可实现对电机转速的高精度闭环监控。除此之外,在光栅码盘上设置有零位信息,除可监控转子的转速外,还可利用该零位信息掌握电机转子旋转时的实时方位位置信息。因此,控制中心就可以更加精确地将点云中的图像点与转子的绝对角度对应起来,从而提高点云成像地稳定性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1