一种长轴工件机器视觉检验装置
1.本发明主要涉及视觉检测领域,具体是一种长轴工件机器视觉检验装置。
背景技术:
2.对于船用螺栓、销子等长轴类零件,需要在加工完成后对其表面质量进行检测,以确保产品的表面质量,一旦表面质量不达标,则需要进行返工。利用机器视觉的检测机构能够高效的完成工件表面质量的检测工作,但是长轴类工件本身重量较大,无法为其匹配合适的检测生产线完成检测,且工件的吊装转运过程也增加了检测难度,增加了工件表面被磕碰、划伤的概率。因而对于现在的长轴类工件的检测,仍然需要依赖工作人员肉眼的检测,使得检测结果并不准确,无法保证对于长轴类工件表面质量的良好检测。
技术实现要素:
3.为解决现有技术的不足,本发明提供了一种长轴工件机器视觉检验装置,它能够对存放状态的长轴类零件进行检测,在不对工件进行吊装与输送的前提下,完成对长轴类工件表面质量的视觉检测,提高了检测效率与检测精度。
4.本发明为实现上述目的,通过以下技术方案实现:
5.一种长轴工件机器视觉检验装置,包括存放架以及检测架,所述存放架与检测架均为三角形,所述存放架两侧均设置若干用于放置长轴工件的承托部件,所述承托部件设置在存放架两端的承托架以及一对承托辊轮,两个所述承托辊轮铰接在承托架顶部,所述存放架底部设置对接槽;所述检测架底部铰接与对接槽相配合的连接杆,所述检测架底部铰接伸展架,所述检测架与伸展架之间设置伸展动力机构,所述检测架两侧水平设置调整滑轨,所述调整滑轨上滑动设置调整座,两个所述调整座同步运行,两个所述调整座上设置连接架,所述检测架上设置用于推动连接架上下滑动的调整动力机构,所述调整座上设置导轨,所述导轨上设置滑动座,所述导轨后侧设置直线位移驱动装置,所述直线位移驱动装置用于带动滑动座沿导轨往复直线运动,所述滑动座前端设置圆形的固定轴,所述固定轴上转动设置环套,所述环套上设置角度调整机构,所述环套上设置工业相机,所述检测架上与导轨相对一侧设置控制器,所述伸展动力机构、直线位移驱动装置、调整动力机构以及角度调整机构均与控制器电连接。
6.所述承托架底部设置驱动辊,所述驱动辊上设置把手,所述驱动辊与其中一个承托辊轮抵触接触。
7.所述伸展动力机构包括电推杆以及滑动支杆,所述电推杆的末端与检测架铰接,所述电推杆的前端与伸展架铰接,所述滑动支杆连接在检测架与电推杆之间。
8.所述直线位移驱动装置包括设置在检测架两端的延伸架,两侧的所述延伸架上分别转动设置主动带轮以及从动带轮,所述主动带轮与从动带轮之间张紧有同步带,所述主动带轮上设置伺服电机。
9.所述固定轴中部设置环槽,所述环套与环槽相适应,所述环套与环槽之间设置轴
承。
10.所述环套一侧设置环齿,所述角度调整机构为设置在滑动座上的角度调整电机,所述角度调整电机与环齿之间通过主动齿轮啮合。
11.所述伸展架中部设置中置安装杆,所述调整动力机构包括调整丝杠以及调整电机,所述调整丝杠转动设置在安装杆两端,所述调整丝杠上配合设置调整螺母,所述调整螺母与连接架中部固定连接,所述调整电机设置在安装杆底部,所述调整电机通过齿轮传动驱动调整丝杠。
12.所述连接杆前端设置卡槽,所述卡槽与对接槽插接配合。
13.对比现有技术,本发明的有益效果是:
14.长轴类工件通常在三角形的支架两侧通过两点式横担暂存,三角形的支架比较稳定,且通过三角形的设置方式,可以保证工件在存放时互不干涉,从而减少工件间的磕碰。本检测装置的检测架能够实现与存放架的对接,并且完成检测用工业相机的调整,从而完成对存放架上不同位置工件的检测。本检测装置可以避免工件的吊装运输,减少工件受到磕碰划伤的风险。本装置替代了人工检验的工作,提高了工件的表面质量检测效率与检测精度。
附图说明
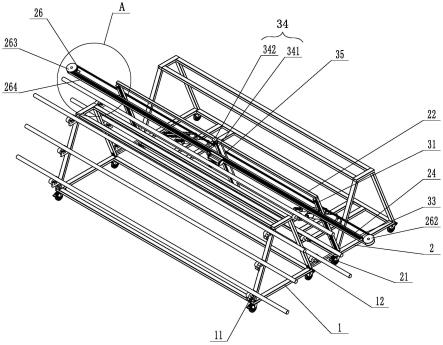
15.附图1是本发明立体视角结构示意图;
16.附图2是本发明左视视角结构示意图;
17.附图3是本发明检测架第一立体视角结构示意图;
18.附图4是本发明检测架第二立体视角结构示意图;
19.附图5是本发明a部局部放大结构示意图;
20.附图6是本发明b部局部放大结构示意图。
21.附图中所示标号:1、存放架;2、检测架;11、承托部件;12、对接槽;13、承托架;14、承托辊轮;15、驱动辊;16、把手;21、连接杆;22、伸展架;23、伸展动力机构;24、导轨;25、滑动座;26、直线位移驱动装置;27、环套;28、角度调整机构;29、工业相机;31、调整滑轨;32、调整座;33、连接架;34、调整动力机构;35、安装杆;211、卡槽;231、电推杆;232、滑动支杆;251、环槽;252、角度调整电机;261、延伸架;262、主动带轮;263、从动带轮;264、同步带;265、伺服电机;271、环齿;341、调整丝杠;342、调整电机。
具体实施方式
22.结合附图和具体实施例,对本发明作进一步说明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所限定的范围。
23.如图1-6所示,本发明所述一种长轴工件机器视觉检验装置,包括存放架1以及检测架2,所述存放架1作为工件的暂存架,通常存放架1为三角形支撑结构,存放架1的两侧边上均安装若干用于放置长轴工件的承托部件11,通过存放架1两端的一对承托部件11,可以实现对长轴类工件的承托暂存。具体的,所述存放架1底部还可以安装轮组,轮组可实现长轴工件的转运,为工件的搬运提供基础。本发明所公布的长轴工件视觉检测装置,是基于存
放架1的结构而设计的配套装置,可以在长轴类工件暂存时对工件的表面质量进行检测。
24.所述检测架2为独立设置,检测架2本身为三角形架体支撑结构,为了方便转移,所述检测架2底部也安装万向轮组,轮组本身可锁死。
25.所述承托部件11为焊接在存放架1两端的承托架13以及一对承托辊轮14,两个所述承托辊轮14转动连接在承托架13顶部,两个所述承托辊轮14平行设置,两个所述承托辊轮14之间为长轴类工件的存放位置。通过承托辊轮14的设置,不会对工件外表划伤,且能够使长轴类工件更为方便的转动,从而对工件的外表进行视觉检测。在进行视觉检测时,为了保障工件整个圆周面都得到检测,因而需要对工件进行转动,至少需要旋转两次,使工件整个圆周均进行依次视觉识别才能完成工件的表面质量检测。为了使工件能够更为流畅的旋转,本实施方式中在所述承托架13底部转动安装驱动辊15,所述驱动辊15上具有把手16,所述驱动辊15与其中一个承托辊轮14抵触接触。通过转动把手16,可以带动驱动辊15带动其中一个承托辊轮14转动,从而带动工件的转动,使工件能够轻松的转动,从而完成不同角度下的视觉检测。
26.所述存放架1底部设置对接槽12,所述检测架2底部铰接与对接槽12相配合的连接杆21,所述连接杆21前端设置卡槽211,所述卡槽211与对接槽12插接配合。当卡槽211与对接槽12配合后,可插接销子进行固定,从而完成检测架2与存放架1的对接,从而完成后续工业相机29检测时的稳定性,保证检测相机29与工件之间的距离。
27.所述检测架2底部铰接伸展架22,铰接点在所述伸展架22的底部,所述检测架2与伸展架22之间设置伸展动力机构23,所述伸展动力机构23能够使伸展架22顶部展开,从而使伸展架22能够展开一定角度后与存放架1的侧边平行,使工业相机29在对每层的长轴类工件进行检测时,均能够保证与工件之间的距离。具体的,所述伸展动力机构23包括电推杆231以及至少两个滑动支杆232,所述电推杆231的末端与检测架2铰接,所述电推杆231的前端与伸展架22铰接,所述滑动支杆232铰接连接在检测架2与电推杆231之间。所述滑动支杆232作为支撑杆,可以对伸展架22进行稳定的支撑。所述电推杆231作为动力机构,若电推杆231设置至少两个,则多个电推杆231应当同步驱动。
28.所述检测架2两侧水平安装调整滑轨31,所述调整滑轨31上滑动安装调整座32,两个所述调整座32上连接有连接架33,两个所述调整座32同步运行,从而保障连接架33能够沿着调整滑轨31进行往复的直线运动。所述检测架2上设置用于推动连接架33上下滑动的调整动力机构34,所述伸展架22中部焊接安装中置安装杆35,所述中置安装杆35作为调整动力机构34的安装位置。具体的,本实施方式中所述调整动力机构34包括调整丝杠341以及调整电机342,安装杆35的两端安装轴承座,所述调整丝杠341转动安装在安装杆35两端的轴承座上。所述调整丝杠341上配合有调整螺母,所述调整螺母与连接架33中部固定连接,所述调整电机342安装在安装杆35底部,所述调整电机342通过齿轮传动驱动调整丝杠341。所述调整电机342优选伺服电机,通过调整电机342的驱动,可使连接架33能够在调整滑轨31的限位下稳定的进行滑动,从而适配不同层安置的工件的高度。所述调整座32上安装导轨24,所述导轨24呈水平状态,从而与存放的长轴工件的轴线平行,从而为工业相机29的移动进行引导。所述导轨24上滑动安装有滑动座25,所述导轨24后侧安装直线位移驱动装置26,所述直线位移驱动装置26用于带动滑动座25沿导轨24往复直线运动。通过调整滑轨31以及导轨24的引导作用,可以使工业相机29在平面内移动,从而适配任意位置的长轴类工
件,完成存放架1上任意高度的长轴工件的表面质量检测。所述直线位移驱动装置26包括焊接在检测架2两端的延伸架261,延伸架261延长到导轨24端部一端,两侧的所述延伸架261上分别转动安装主动带轮262以及从动带轮263,所述主动带轮262与从动带轮263之间张紧有同步带264,所述主动带轮262上设置伺服电机265。所述同步带264与滑动座25背部固定连接,通过伺服电机265驱动主动带轮262转动,可利用同步带264带动滑动座25沿导轨24进行直线运动,从而实现工业相机29沿工件轴线方向的位移。
29.具体的,为了使工业相机29的姿态得到更好的调整,本实施方式还增加了工业相机29的摆动机构。所述滑动座25前端设置圆形的固定轴,所述固定轴上转动设置环套27,所述固定轴中部设置环槽251,所述环套27即配合安装在环槽251内,通过环槽251对环套27进行限位。所述环套27与环槽251之间设置轴承,从而使环套27能够更为顺畅的转动。所述环套27上设置角度调整机构28,工业相机29即安装在所述环套27上,通过角度调整机构28的驱动,可以带动环套27上的工业相机29转动一定的角度,从而微调工业相机29相对于工件的拍摄角度,确保良好的视觉识别效果,使工件的表面质量检测更为精确。具体的,所述环套27一侧具有环齿271,所述角度调整机构28为在滑动座25上固定安装的角度调整电机,所述角度调整电机与环齿271之间通过主动齿轮啮合。通过角度调整电机的驱动,可实现环套27在滑动座25上的转动,从而完成工业相机29的姿态调整。
30.所述检测架2上与导轨24相对一侧设置控制器,所述伸展动力机构23、直线位移驱动装置26、调整动力机构34以及角度调整机构28均与控制器电连接,通过控制器完成本装置中各动作元件的控制。工业相机29采集的图像传递到控制器,由控制器对图像进行识别比对并做出判断,给出工件表面质量的缺陷状况,并根据评判标准给出评级,完成工件的检测。以时间为顺序,本装置的检测逻辑为:首先将检测架2移动到与存放架1的平行位置,随后将连接杆21展开与存放架1底部的对接槽12完成对接。然后通过控制器控制伸展动力机构23伸展,将伸展架22展开一定角度,使伸展架22与存放架1侧边平行。随后通过控制器控制调整动力机构34推动连接架33在调整滑轨31的限位下滑动,使连接架33移动到最顶部工件一侧,随后通过控制器控制角度调整机构28动作,使工业相机29能够正对工件表面,随后控制器控制直线位移驱动机构26动作,带动滑动座25自导轨24一端移动到另一端,完成对长轴工件一面的视觉检测。随后通过驱动辊驱动工件转动120度,随后控制器控制直线位移驱动机构26反向动作,带动滑动座25自导轨24上返回,完成另一角度下的长轴工件的视觉检测,随后通过驱动辊驱动工件继续转动120度,然后控制器控制直线位移驱动机构26带动滑动座25继续自导轨24一端移动到另一端,完成该长轴工件的视觉检测。通过两侧的长轴工件转动以及工业相机29的三次直线位移,完成了长轴工件的表面视觉检测。随后,控制器控制调整动力机构34推动连接架33在调整滑轨31的限位下向下滑动,使连接架33移动到第二层的长轴工件一侧,随后重复上述的直线位移驱动机构26带动滑动座25自导轨24两端往复移动三次,长轴工件转动两次,最终完成该长轴工件的检测,重复上述操作,直至该侧长轴工件完全完成,随后通过控制器控制伸展动力机构23收缩,使伸展架22收回,松开连接杆21与对接槽12的连接,将检测架2移动到存放架1一侧或者另一存放架1所在位置,完成其他工件的检测。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1