在轨检测拼接式望远镜各子镜曲率半径非一致性的方法
1.本发明属于光学检测技术领域,具体涉及一种在轨检测拼接式望远镜各子镜曲率半径非一致性的方法。
背景技术:
2.采用拼接式主镜结构已成为未来空间超大口径望远镜发展的重要趋势。传统采用单块镜面的空间大口径望远镜在镜面加工、检测、支撑设计与轻量化,以及整个镜体的运输、发射等方面存在很大困难。拼接式主镜结构的出现为解决这些问题提供了有效途径。
3.拼接式空间望远镜主镜结构中,各拼接子镜曲率半径非一致性(不同的拼接子镜具有不同的曲率半径)是影响拼接式空间望远镜最终成像性能的关键问题之一。拼接式空间望远镜在轨展开之后,需要经过一些复杂的步骤,逐步完成不同拼接子镜的共焦与共相,而各拼接子镜曲率半径非一致性作为一种特殊的“面形误差”,会降低共相之后的面形精度。
4.拼接式空间望远镜主镜各拼接子镜曲率半径非一致性误差的准确检测是曲率半径非一致性在轨校正的必要前提。目前美国已经发射的詹姆斯
·
韦伯空间望远镜具有调整各拼接子镜曲率半径非一致性的能力。然而相关的各拼接子镜曲率半径非一致性误差检测方法并没有公开,需要自主研发相关方法以解决各拼接子镜曲率半径非一致性误差在轨检测的问题。
技术实现要素:
5.为了有效检测拼接式空间望远镜各拼接子镜曲率半径非一致性误差,本发明提供一种在轨检测拼接式望远镜各子镜曲率半径非一致性的方法,以填补该领域的空白。
6.本发明解决上述技术问题采用的技术方案是:
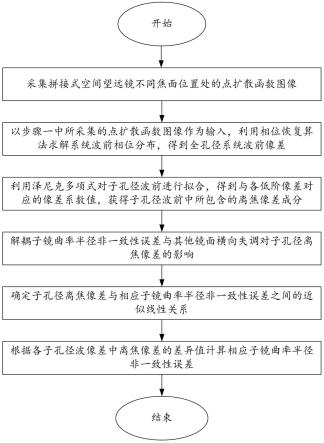
7.本发明的在轨检测拼接式望远镜各子镜曲率半径非一致性的方法,包括以下步骤:
8.步骤一、采集拼接式空间望远镜不同焦面位置处的点扩散函数图像;
9.步骤二、以步骤一中所采集的点扩散函数图像作为输入,利用相位恢复算法求解系统波前相位分布,得到全孔径系统波前像差;
10.步骤三、利用泽尼克多项式对子孔径波前进行拟合,得到与各低阶像差对应的像差系数值,获得子孔径波前中所包含的离焦像差成分;
11.步骤四、解耦子镜曲率半径非一致性误差与其他镜面横向失调对子孔径离焦像差的影响;
12.步骤五、确定子孔径离焦像差与相应子镜曲率半径非一致性误差之间的近似线性关系;
13.步骤六、根据各子孔径波像差中离焦像差的差异值计算相应子镜曲率半径非一致性误差。
14.进一步的,步骤三的具体操作步骤如下:
15.步骤s3.1:将被测子孔径波前用n项泽尼克多项式表示为:
16.w(x,y)=q1z1(x,y)+q2z2(x,y)+...+q
nzn
(x,y)
ꢀꢀꢀ
(1)
17.式中,w表示波像差值,zn表示第n项泽尼克多项式,qn表示第n项泽尼克多项式中相应的泽尼克系数,(x,y)表示光瞳面位置坐标;
18.步骤s3.2:公式(1)用矩阵形式表示为:
19.w(x,y)=q
tzꢀꢀꢀ
(2)
20.式中,q表示包含各项泽尼克系数的向量,上标t表示矩阵的转置,z表示泽尼克多项式矩阵。
21.步骤s3.3:设有m个离散测量数据点wi(xi,yi),i=1,2,...,m;令a
ij
=zj(xi,yi),j=1,2,...,n,m》n,代入以上公式(1)和公式(2),得到矛盾方程组:
[0022][0023]
步骤s3.4:公式(3)用矩阵形式表示为:
[0024]
aq=w
ꢀꢀꢀ
(4)
[0025]
式中,α=(a
ij
)为m
×
n矩阵,q=[q1,q
2,
...,qn]
t
,w=[w1,w
2,
...,wm]
t
;
[0026]
步骤s3.5:利用最小二乘准则求解矛盾方程组,得到离焦像差所对应的像差系数值:
[0027]
q=(a
t
a)-1atwꢀꢀꢀ
(5)
[0028]
式中,上标t表示矩阵的转置。
[0029]
进一步的,步骤四的具体操作步骤如下:
[0030]
步骤s4.1:全孔径彗差在不同的子孔径产生相同的彗差成分,对各个子孔径彗差成分取平均得到子孔径彗差值:
[0031][0032]
式中,n表示拼接式空间望远镜主镜结构中各拼接子镜的数量,表示第i个子孔径x方向彗差系数,表示第i个子孔径y方向彗差系数;
[0033]
步骤s4.2:根据子孔径彗差与全孔径彗差之间的关系,得到全孔径彗差值:
[0034][0035]
式中,k表示全孔径尺寸与子孔径尺寸的比值,c7表示x方向全孔径彗差系数,c8表示y方向全孔径彗差系数;
[0036]
全孔径彗差在第i个子孔径衍生出的离焦像差值为:
[0037][0038]
式中,
·
表示向量点乘,与分别表示在x方向与y方向上第i个子孔径中心与全孔径中心之间的距离与全孔径半径的比值;
[0039]
步骤s4.3:从子孔径离焦像差中去除全孔径彗差衍生出的离焦像差成分,剩余的即为由子镜曲率半径非一致性误差所引起的离焦像差成分:
[0040][0041]
式中,表示第i个子孔径中总的离焦像差成分,表示由全孔径彗差在第i个子孔径中衍生出的离焦像差成分,表示由第i个子孔径中由子镜曲率半径非一致性误差引起的离焦像差成分,即从总的离焦像差成分中去掉全孔径彗差衍生出的那一部分。
[0042]
进一步的,步骤五的具体操作步骤如下:
[0043]
在光学仿真软件中引入一个子镜曲率半径非一致性误差改变量,提取离轴子系统离焦像差的变化量,子镜曲率半径非一致性误差改变量与离轴子系统离焦像差变化量的比值即为线性关系的系数,以此确定子孔径离焦像差与相应子镜曲率半径非一致性误差之间的近似线性关系。
[0044]
进一步的,步骤六的具体操作步骤如下:
[0045]
在步骤五中得到的子孔径离焦像差与相应子镜曲率半径非一致性误差之间的近似线性关系的基础上,将子孔径离焦像差值除以步骤五中得到的线性关系的系数,得到相应子镜曲率半径非一致性误差;统计并记录各个子镜的曲率半径误差的非一致性误差。
[0046]
本发明的有益效果是:
[0047]
本发明的一种在轨检测拼接式望远镜各子镜曲率半径非一致性的方法,能够为拼接式空间望远镜主镜各拼接子镜曲率半径非一致性在轨校正提供必要的前提条件,能够有效解决各拼接子镜曲率半径非一致性误差在轨检测的技术难题,能够降低主镜面形误差,提高主镜面形精度,提高拼接式空间望远镜的最终成像性能。
附图说明
[0048]
图1为本发明的一种在轨检测拼接式望远镜各子镜曲率半径非一致性的方法的流程图。
具体实施方式
[0049]
以下结合附图对本发明做进一步详细说明。
[0050]
如图1所示,本发明的一种在轨检测拼接式望远镜各子镜曲率半径非一致性的方法,主要应用于在轨对拼接式空间望远镜像质进行调整。具体包括以下步骤:
[0051]
步骤一、由于拼接式空间望远镜主镜结构中各拼接子镜间的曲率半径非一致性会影响系统波前像差,因此可从系统波像差入手进行检测。首先采集拼接式空间望远镜不同
焦面位置处的点扩散函数图像以便下一步计算系统波前像差。
[0052]
步骤二、以步骤一中所采集的不同焦面处的点扩散函数图像作为输入,利用相位恢复算法求解系统波前相位分布,得到全孔径系统波前像差;其中,所采用的相位恢复算法是一种常用的空间望远镜在轨波前检测方法,它能够利用(离)焦面图像恢复图像相位,进而通过迭代求解系统波前相位分布。
[0053]
步骤三、子孔径波前包括:非共相误差以及离焦、像散等连续性像差。其中,非共相误差包括:piston误差与tip-tilt误差,对应泽尼克多项式的前三项。因此,利用泽尼克多项式对子孔径波前进行拟合,可以得到与各低阶像差(离焦、像散、彗差等)对应的像差系数值,得到子孔径波前中所包含的离焦像差成分,对应泽尼克多项式的第四项。
[0054]
具体操作步骤如下:
[0055]
步骤s3.1:将被测子孔径波前用n项泽尼克多项式表示为:
[0056]
w(x,y)=q1z1(x,y)+q2z2(x,y)+...+q
nzn
(x,y)
ꢀꢀꢀ
(1)
[0057]
式中,w表示波像差值,zn表示第n项泽尼克多项式,qn表示第n项泽尼克多项式中相应的泽尼克系数,(x,y)表示光瞳面位置坐标;优选的,泽尼克多项式可取前9项,即n=9。
[0058]
步骤s3.2:公式(1)可利用矩阵形式表示为:
[0059]
w(x,y)=q
tzꢀꢀꢀ
(2)
[0060]
式中,q表示包含各项泽尼克系数的向量,上标t表示矩阵的转置,z表示泽尼克多项式矩阵。
[0061]
步骤s3.3:设有m个离散测量数据点wi(xi,yi),i=1,2,...,m;令a
ij
=zj(xi,yi),j=1,2,...,n,m》n,代入以上公式(1)和公式(2),得到矛盾方程组:
[0062][0063]
步骤s3.4:公式(3)可利用矩阵形式表示为:
[0064]
aq=w
ꢀꢀꢀ
(4)
[0065]
式中,α=(a
ij
)为m
×
n矩阵,q=[q1,q
2,
...,qn]
t
,w=[w1,w
2,
...,wm]
t
;
[0066]
步骤s3.5:矛盾方程组一般不存在通常意义下的解,即对任何n维向量q,一般aq-w≠o,此时利用最小二乘准则求解参数,可得到离焦像差所对应的像差系数值。
[0067]
q=(a
t
a)-1atwꢀꢀꢀ
(5)
[0068]
式中,上标t表示矩阵的转置。
[0069]
步骤四、解耦子镜曲率半径非一致性误差与其他镜面横向失调对子孔径离焦像差的影响。
[0070]
由于子镜曲率半径非一致性误差与其他镜面(如次镜)横向失调(如偏心、倾斜)同样会产生子孔径离焦像差,其中,其他镜面横向失调会引入全孔径彗差,从而衍生出子孔径离焦像差和彗差。因此在利用子镜曲率半径非一致性误差引起的子孔径离焦像差来求解子镜曲率半径非一致性误差时,需要对子镜曲率半径非一致性误差与其他镜面横向失调对子孔径离焦像差的影响进行解耦,解耦的基本原理是:由于其他镜面横向失调所引入的全孔径彗差不仅在子孔径衍生出离焦像差,还衍生出彗差,而子镜曲率半径非一致性误差产生
的子孔径彗差是可以忽略不计的,因此可以根据此差异性进行解耦。首先利用子孔径彗差来求解全孔径彗差,再利用全孔径彗差求解其在各个子孔径所产生的离焦像差,最后将这一部分子孔径离焦像差去除即可。
[0071]
具体操作步骤如下:
[0072]
步骤s4.1:全孔径彗差在不同的子孔径产生相同的彗差成分,对各个子孔径彗差成分取平均得到子孔径彗差值:
[0073][0074]
式中,n表示拼接式空间望远镜主镜结构中各拼接子镜的数量,表示第i个子孔径x方向彗差泽尼克系数(第7项泽尼克系数),表示第i个子孔径y方向彗差泽尼克系数(第8项泽尼克系数)。
[0075]
步骤s4.2:根据子孔径彗差与全孔径彗差之间的关系,可以得到全孔径彗差值:
[0076][0077]
式中,k表示全孔径尺寸与子孔径尺寸的比值,c7表示x方向全孔径彗差系数,c8表示y方向全孔径彗差系数。
[0078]
全孔径彗差在第i个子孔径衍生出的离焦像差值为:
[0079][0080]
式中,
·
表示向量点乘,与分别表示在x方向与y方向上第i个子孔径中心与全孔径中心之间的距离与全孔径半径的比值。通过公式(8)可以看出,全孔径彗差在不同的子孔径衍生出不同的离焦像差值。
[0081]
步骤s4.3:从子孔径离焦像差中去除全孔径彗差衍生出的离焦像差成分,剩余的即为由子镜曲率半径非一致性误差所引起的离焦像差成分:
[0082][0083]
式中,表示第i个子孔径中总的离焦像差成分,表示由全孔径彗差在第i个子孔径中衍生出的离焦像差成分,表示由第i个子孔径中由子镜曲率半径非一致性误差引起的离焦像差成分,即从总的离焦像差成分中去掉全孔径彗差衍生出的那一部分。
[0084]
步骤五、确定子孔径离焦像差与相应子镜曲率半径非一致性误差之间的近似线性关系。
[0085]
拼接式空间望远镜主镜结构中的每一片子镜与系统中其他镜面组成一个离轴子
系统,当改变子镜的曲率半径时将会引入离焦像差。在一定范围内,引入的离焦像差的变化量与子镜曲率半径非一致性误差的改变量成线性关系。据此,可在光学仿真软件中,引入一个小的子镜曲率半径非一致性误差改变量,然后提取离轴子系统离焦像差的变化量,子镜曲率半径非一致性误差改变量与离轴子系统离焦像差变化量的比值即为线性关系的系数,以此可以确定子孔径离焦像差与相应子镜曲率半径非一致性误差之间的近似线性关系。其中,子镜曲率半径非一致性误差改变量与离轴子系统离焦像差变化量的比值为子孔径离焦像差相对于相应子镜曲率半径非一致性误差的敏感度。
[0086]
步骤六、根据各子孔径波像差中离焦像差的差异值计算相应子镜曲率半径非一致性误差。
[0087]
在步骤五中得到的子孔径离焦像差与相应子镜曲率半径非一致性误差之间的近似线性关系的基础上,将子孔径离焦像差值除以步骤五中得到的线性关系的系数(子镜曲率半径非一致性误差改变量与离轴子系统离焦像差变化量的比值),由此可将子孔径离焦像差值换算成相应子镜的曲率半径值,即得到相应子镜曲率半径非一致性误差;然后统计并记录各个子镜的曲率半径误差的非一致性误差即可。
[0088]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1