一种用于光学探测的扁平鱼形水下机器人及探测方法
1.本发明涉及水下机器人领域,具体地说是一种用于光学探测的扁平鱼形水下机器人及探测方法。
背景技术:
2.随着人类探测深海活动的不断深入,海底精细探测需求也越来越迫切。海底精细探测需求主要包括声学探测和光学探测,其中深海光学成像探测作为水下探测的一种手段,其具有分辨能力强、采样频率和实时性高、技术基础坚实等技术特点,具有其它方式无法比拟的优势,已经成为深海资源勘测、矿产开发、军事应用以及生物、化学活动等探索的核心支撑技术。
3.自主水下机器人(auv)可在水下自主航行,其具有航行稳定、携带传感器种类多、水下续航时间长、能够自主完成多种使命等优势,已经成为深海探测活动的重要技术手段之一。但由于海底环境复杂,未知因素较多,水下机器人会受到复杂障碍物和海底地形引起的复杂变化海流影响,因此在海底光学成像探测时,需要auv在满足基本的导航、定位、航行等功能的基础上,还要具有较好的机动能力、抗横滚能力和抗坐底能力,而且考虑到探测图像清晰度的要求,还要求auv具有较好的稳定性,这就需要auv在设计时综合考虑auv线型、推进器布置以及艉部舵翼布置,以满足深海光学成像探测需要,另外探测图像清晰度还要考虑相机和光源配合等因素,并且仅利用拍照成像往往难以满足海底精细探测需求,还要考虑与其他方式相结合。
技术实现要素:
4.本发明的目的在于提供一种用于光学探测的扁平鱼形水下机器人及探测方法,其采用扁平鱼形状,不仅具有高机动性能和较好的直航稳定性,还具有抗横滚和抗坐底能力,另外搭载的光学成像组件可配合实现海底图像全场景的精准拼接和二维、三维信息的获取,从而满足海底复杂地形精细光学探测要求。
5.本发明的目的是通过以下技术方案来实现的:
6.一种用于光学探测的扁平鱼形水下机器人,包括水下机器人本体和光学成像组件,其中水下机器人本体包括上下两侧的本体平面和左右两侧的本体弧面,且本体弧面前后两端设有水平航行推进器,本体平面前端两侧以及本体平面后端中部均设有垂直航行推进器,水下机器人本体后端设有艉部推进器,水下机器人本体下侧的本体平面上设有多组光学成像组件,且每组光学成像组件均包括沿着水下机器人本体轴向由前到后依次排列成一列的三维激光扫描仪、闪光灯和水下高清相机。
7.所述水下机器人本体下侧的本体平面设有多组角度调节组件,且三维激光扫描仪、闪光灯和水下高清相机分别安装于对应的角度调节组件上。
8.所述角度调节组件包括第一角度调节装置、第二角度调节装置、调节座和调节架,其中调节座包括相互垂直的第一侧板和第二侧板,第一角度调节装置的输出端与所述第一
侧板连接,所述第二侧板上设有第二角度调节装置和调节架,且所述调节架通过所述第二角度调节装置驱动转动,水下高清相机、闪光灯、三维激光扫描仪分别安装于对应的调节架上。
9.一种根据所述的用于光学探测的扁平鱼形水下机器人的探测方法,包括如下步骤:
10.步骤一:调节三维激光扫描仪、水下高清相机和闪光灯的角度,其中相邻的水下高清相机拍摄范围之间形成重合的覆盖区,三维激光扫描仪扫描范围与对应的水下高清相机拍摄范围沿着水下机器人本体轴向对齐;
11.步骤二:水下机器人本体以设定速度移动,水下高清相机以设定频率拍照,同时三维激光扫描仪启动扫描,其中同一水下高清相机获得的相邻照片之间形成重合的覆盖区;
12.步骤三:系统获得各个水下高清相机拍摄的照片后进行全景拼接,进而获得二维海底全景图像,拼接过程具体为:相邻照片之间的覆盖区保证重合实现相邻照片的准确拼接;
13.步骤四:系统将三维激光扫描仪获得的海底三维点云坐标通过坐标转换使三维激光点映射到二维海底全景图像上,二纬海底全景图像像素通过三维点云的三维坐标具有几何和深度信息,同时三维点云的三维激光点获得二维海底全景图像的颜色和纹理信息。
14.本发明的优点与积极效果为:
15.1、本发明采用扁平鱼形状,其具有一定的细长比,流线型较好,具有较好的直航稳定性,同时水下机器人本体的高度小、面积大,不易引起纵倾触底,具有抗横滚和抗坐底能力。
16.2、本发明通过对扁平鱼形水下机器人本体上的水平航行推进器、垂直航行推进器、艉部推进器进行合理配置,保证了机器人载体的高机动性能。
17.3、本发明整体呈扁平鱼形状,其下侧可根据需要设置多组光学成像组件,并且水下高清相机拍照获得的相邻照片形成一定范围重合的覆盖区,进而可实现相邻照片的准确拼接获得海底全景图像,同时水下高清相机和对应的闪光灯均角度可调,以保证成像清晰。
18.4、本发明的光学成像组件还设有三维激光扫描仪用于获取海底三维点云坐标,并通过系统坐标转换将三维激光点映射到二维图像,这样全景图像像素获得点云的三维坐标,从而具有几何和深度信息,同时三维点云也能得到全景图像的颜色和纹理信息,从而获取海底环境的三维几何及纹理信息,满足了海底复杂地形精细光学探测要求。
附图说明
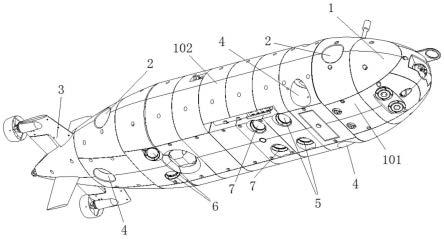
19.图1为本发明的结构示意图,
20.图2为图1中本发明的仰视图,
21.图3为图1中本发明的主视图,
22.图4为图3中水下高清相机范围的a向视图,
23.图5为图3中水下高清相机和闪光灯配合示意图,
24.图6为图5中水下高清相机和闪光灯配合的b向视图,
25.图7为本发明的角度调节组件结构示意图,
26.图8为本发明的水下高清相机拍照状态示意图。
27.其中,1为水下机器人本体,101为本体平面,102为本体弧面,2为水平航行推进器,3为艉部推进器,4为垂直航行推进器,5为三维激光扫描仪,6为水下高清相机,7为闪光灯,8为艉部舵翼,9为调节架,10为调节座,11为第二角度调节装置,12为第一角度调节装置。
具体实施方式
28.下面结合附图对本发明作进一步详述。
29.如图1~8所示,本发明包括水下机器人本体1和光学成像组件,其中水下机器人本体1整体呈扁平鱼形状,其包括上下两侧的本体平面101和左右两侧的本体弧面102,其中本体弧面102前后两端设有水平航行推进器2,本体平面101前端两侧与对应侧本体弧面102交汇处以及本体平面101后端中部均设有垂直航行推进器4,水下机器人本体1后端设有艉部推进器3,水下机器人本体1下侧的本体平面101上设有多组光学成像组件。本发明采用扁平鱼形状,其具有一定的细长比,流线型较好,具有较好的直航稳定性,同时具有抗横滚、抗坐底能力,并且本发明通过对水平航行推进器2、垂直航行推进器4、艉部推进器3进行合理配置,保证了机器人载体的高机动性。所述水平航行推进器2、垂直航行推进器4、艉部推进器3均为本领域公知技术。
30.如图1~6所示,所述光学成像组件包括沿着水下机器人本体1轴向由前到后依次排列形成一列的三维激光扫描仪5、闪光灯7和水下高清相机6,本实施例中,所述水下机器人本体1下侧的本体平面101设有两组(两列)光学成像组件,其中水下高清相机6在闪光灯7配合下用于获取水下高清图像,并且如图8所示,水下高清相机6获得的照片基于几何拼接可以获取海底全景图像,所述几何拼接是指相邻两张照片存在一定范围的重合覆盖区,这样拼接时相邻照片的覆盖区只要能够保证重合,即可实现相邻照片的准确拼接,进而获得海底全景图像,另外在水下观测时,不同组光学成像组件中的三维激光扫描仪5以同样方式配合用于获取水下海底三维点云坐标,并且系统通过坐标转换将三维激光点映射到二维全景图像,这样全景图像像素获得点云的三维坐标,从而具有几何和深度信息,同时三维点云也能得到全景图像的颜色和纹理信息,从而获取海底环境的三维几何及纹理信息。所述水下高清相机6、三维激光扫描仪5以及后续图像转换处理均为本领域公知技术。
31.所述水下机器人本体1下侧的本体平面101设有多组角度调节组件,且三维激光扫描仪5、闪光灯7和水下高清相机6分别安装于对应的角度调节组件上,其中如图3~6所示,两组水下高清相机6和两组闪光灯7左右方向角度和前后方向角度均可以根据需要调整,这样一方面可以调节两组水下高清相机6重合的覆盖区范围,以满足后续拼接要求,另一方面也可以调节闪光灯7的照射范围,以保证闪光灯7照射范围覆盖对应水下高清相机6的拍摄范围,进而保证成像清晰。
32.如图7所示,本实施例中,所述角度调节组件包括第一角度调节装置12、第二角度调节装置11、调节座10和调节架9,其中调节座10成l型,其包括相互垂直的第一侧板和第二侧板,第一角度调节装置12固设于水下机器人本体1内,且所述第一角度调节装置12的输出端与所述调节座10的第一侧板连接,所述调节座10即通过所述第一角度调节装置12驱动转动,所述调节座10的第二侧板上设有第二角度调节装置11和调节架9,且所述调节架9通过所述第二角度调节装置11驱动转动,水下高清相机6、闪光灯7、三维激光扫描仪5分别安装于对应的调节架9上,所述第一角度调节装置12调节对应元件前后方向的角度,所述第二角
度调节装置11调节对应元件左右方向的角度。所述第一角度调节装置12和第二角度调节装置11可采用水下舵机等装置。
33.如图1~2所示,所述水下机器人本体1后端设有艉部舵翼8用于增强水下机器人本体1的机动能力。
34.本发明的工作原理为:
35.本发明首先采用扁平鱼形状,其具有一定的细长比,流线型较好,具有较好的直航稳定性,同时水下机器人本体1的高度小、面积大,不易引起纵倾触底,具有抗横滚和抗坐底能力。另外本发明通过对水平航行推进器2、垂直航行推进器4、艉部推进器3进行合理配置,保证了机器人载体的高机动性,其中三个垂直航向推进器4的同步推进可实现水下机器人本体1的上浮和下潜,两个水平航向推进器2的同步推进可实现水下机器人本体1的左右水平移动,艉部推进器3同步推进可实现水下机器人本体1的前进和后退,另外三个垂直航向推进器4反向推进可实现水下机器人本体1前后方向倾斜或者竖直状态的纵向机动,两个水平航向推进器2反向推进可实现水下机器人本体1左右方向的水平机动旋转。
36.由于本发明整体呈扁平鱼形状,因此本发明下侧可根据需要设置多组光学成像组件,每组光学成像组件中的三维激光扫描仪5、闪光灯7和水下高清相机6依次沿着水下机器人本体1的纵向排成一列,并且角度均可以通过对应的角度调节组件进行调整,其中如图4和图8所示,水下高清相机6拍照获得的相邻照片形成一定范围重合的覆盖区,这样后续拼接时相邻照片的覆盖区只要能够保证重合,即可实现相邻照片的准确拼接,进而可以获得海底全景图像,闪光灯7则配合同组的水下高清相机6调整角度以保证成像清晰,不同组的三维激光扫描仪5以同样方式配合获取海底三维点云坐标,并通过坐标转换将三维激光点映射到二维图像,从而实现全景图像和三维点云的数据融合,进而获取海底环境的三维几何及纹理信息。
37.本发明采用的角度调节组件包括第一角度调节装置12和第二角度调节装置11,其中第一角度调节装置12调节对应元件前后方向的角度,第二角度调节装置11调节对应元件左右方向的角度,不仅控制方便,而且可以精确控制各个元件倾斜角度以满足成像和后续拼接需要。
38.本发明探测方法包括如下步骤:
39.步骤一:如图3~6所示,调节三维激光扫描仪5、水下高清相机6和闪光灯7的角度,其中如图4所示,相邻的水下高清相机6拍摄范围形成重合的覆盖区,这样如图8所示,两个水下高清相机6获得照片中间位置覆盖,闪光灯7角度需保证全覆盖对应水下高清相机6的拍摄范围,以保证成像清晰度,同时三维激光扫描仪5扫描范围与对应的水下高清相机6拍摄范围沿着水下机器人本体1轴向对齐;
40.步骤二:水下机器人本体1以设定速度移动,并且水下高清相机6以设定频率拍照,如图8所示,同一水下高清相机6获得的相邻照片需形成重合的覆盖区,也即图8中的第一张照片和第三张照片之间,以及第二张照片和第四张照片之间,闪光灯7配合闪光,同时三维激光扫描仪5启动扫描;
41.步骤三:系统获得各个水下高清相机6拍摄的照片后进行全景拼接,进而获得二维海底全景图像,拼接过程具体为:如图8所示,相邻照片之间的覆盖区只要能够保证重合,即可实现相邻照片的准确拼接;
42.步骤四:系统将三维激光扫描仪5获得的海底三维点云坐标通过坐标转换,使三维激光点映射到二维海底全景图像上,这样二纬全景图像像素通过三维点云的三维坐标具有几何和深度信息,同时三维点云的三维激光点也获得二维全景图像的颜色和纹理信息,从而实现全景图像和三维点云的数据融合,进而获取海底环境的三维几何及纹理信息。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1