基于APC与IARFT级联处理的雷达目标旁瓣抑制方法
基于apc与iarft级联处理的雷达目标旁瓣抑制方法
技术领域
1.本发明属于雷达信号处理领域,特别涉及雷达目标距离旁瓣与速度旁瓣抑制技术。
背景技术:
2.雷达探测隐身飞机、巡航导弹等高速微弱目标时,为改善这类目标的信杂噪比,通常需要采用长时间相参积累方法。然而长的观测时间,再加之高的目标运动速度以及高的雷达距离分辨率等因素,将会导致目标跨距离单元走动。而传统的相参积累方法,如动目标检测(moving target detection,mtd)暗含了在相参积累时间内目标仅处于一个距离单元的假设。因此利用传统的mtd方法进行长时间相参积累时,将会导致严重的性能下降。基于radon傅里叶变换(radon fourier transform,rft)的长时间相参积累方法可以根据目标的运动参数在补偿目标跨距离单元走动的同时完成相参积累,较好的解决了跨距离单元走动目标的相参积累和能量聚焦的问题。
3.但是,“常规的匹配滤波”+“rft”的级联处理方式,会使得强目标产生较高的距离-速度旁瓣。这些距离-速度旁瓣会遮挡邻近的其他弱目标,进而影响后续目标检测、跟踪等环节的处理效果。尤其当常规匹配滤波处理没有很好地抑制强目标距离旁瓣时,rft方法的速度聚焦性能将进一步恶化。
4.为了解决上述问题,本发明提供了一种基于自适应脉冲压缩(adaptive pulse compression,apc)与迭代自适应rft(iterative adaptive radon fourier transform,iarft)级联处理的雷达目标旁瓣抑制方法。
技术实现要素:
5.本发明的目的在于,针对传统雷达相干处理流程中,匹配滤波与rft级联处理造成的强目标距离-速度旁瓣遮挡邻近其他弱目标的问题,提供一种基于apc与iarft级联处理的雷达目标旁瓣抑制方法,其中要解决的技术问题包括:
6.(1)强目标距离旁瓣的抑制问题;
7.(2)强目标速度旁瓣的抑制问题。
8.本发明所述的基于apc与iarft级联处理的雷达目标旁瓣抑制方法,其特征在于包括以下技术措施:
9.步骤一:首先接收到雷达相参脉冲串的脉冲-距离二维回波数据,然后针对每个脉冲的距离维回波,采用rmvdr方法进行自适应脉冲压缩处理,解决强目标距离旁瓣抑制问题;
10.步骤二:针对速度-距离二维搜索网格中的每个网格点,在自适应脉冲压缩处理后的脉冲-距离二维数据矩阵中,搜索并提取每个网格点对应的相参脉冲串数据;
11.步骤三:针对速度-距离二维搜索网格中的每个网格点,利用步骤二得到的该网格点对应的相参脉冲串数据,计算迭代自适应rft处理所需的相参积累权向量,进而得到该网
格点对应的相参积累结果;由于采用了迭代自适应rft处理,因此该处理过程抑制了相参积累时的速度旁瓣。
12.与“常规的匹配滤波”+“rft”的级联处理方式相比,本发明所述的基于apc与iarft级联处理的雷达目标旁瓣抑制方法,有益效果在于:
13.(1)本方法解决了“常规的匹配滤波”+“rft”的级联处理中,强目标易产生高的距离-速度旁瓣的问题,避免了对邻近微弱目标的遮挡。
14.(2)本方法采用“自适应脉冲压缩”+“迭代自适应rft”的级联处理方式,在抑制强目标距离-速度旁瓣、获得高的距离-速度聚焦能力的同时,便于工程实现。
附图说明
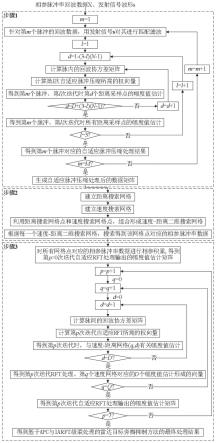
15.图1是基于apc与iarft级联处理的雷达目标旁瓣抑制方法的流程图。
16.图2是用于阐述指示向量含义的示意图。
具体实施方式
17.以下结合说明书附图对本发明作进一步详细描述。参照说明书附图1,本发明的具体实施方式分以下步骤:
18.(1)针对雷达接收到的相参脉冲串的脉冲-距离二维回波数据中的每一行数据,利用rmvdr算法进行自适应脉冲压缩,从而得到自适应脉冲压缩后的脉冲-距离二维输出结果;
19.(2)建立速度-距离二维搜索网格,在自适应脉冲压缩后的脉冲-距离二维输出数据矩阵中,搜索和提取每个网格点对应的相参脉冲串数据;
20.(3)在迭代自适应地求解速度-距离二维搜索网格中每个网格点对应的相参积累权向量的基础上,结合每个网格点对应的相参脉冲串数据,计算得到对应于每个网格点的基于自适应脉冲压缩与迭代自适应rft级联处理的幅度值估计。
21.以下对上述步骤进行详细阐述:
22.(1)将雷达接收到的相参脉冲串的脉冲-距离二维回波数据记为x,然后针对x中的每一行,即,每个脉冲对应的距离维回波数据,利用rmvdr算法进行自适应脉冲压缩,从而得到自适应脉冲压缩后的脉冲-距离二维输出结果,记为本步骤的具体操作如下:
23.①
雷达接收到的相参脉冲串的脉冲-距离二维回波数据x是一个m
×
(d+7(n-1))维的数据矩阵,其中m是相参脉冲的个数,(d+7(n-1))是距离采样点数,相邻两点的距离采样间隔等于发射波形的距离分辨率δr,d是感兴趣的距离段采样点数,n为脉内采样点数;数据矩阵x中的第(m,d)个元素记为x
m,d
,于是,矩阵x表示如下,其中,1≤m≤m,1≤d≤(d+7(n-1)),
24.25.②
针对第m(1≤m≤m)个脉冲的回波数据x
m,1-3(n-1):d+4(n-1)
,用发射信号s对其进行匹配滤波,输出结果记为
[0026][0027]
其中,上标(0)表示第0次迭代,发射信号s表示为,s=[s(0),s(1),l,s(n-1)]
t
,上标t表示向量的转置;
[0028]
③
进入自适应脉冲压缩的第l次迭代(1≤l≤3),对于第d个距离采样点,1-(3-l)(n-1)≤d≤d+(3-l)(n-1),用x
m,d:d+n-1
=[x
m,d x
m,d+1 l x
m,d+n-1
]表示从第d个距离采样点开始的n个距离采样点构成的向量;那么针对向量x
m,d:d+n-1
实施第l次自适应脉冲压缩所需的权向量为,
[0029][0030]
其中,上标(l)表示第l次迭代,下标(m,d)表示所针对的网格点;表示回波协方差矩阵,为噪声功率水平且可由雷达系统测得,in为n
×
n维单位阵;为脉内的信号协方差矩阵,其中,表示第m个脉冲、第l-1次迭代时得到的第d+n个距离采样点的幅度值估计,当l=1时,就是sn表示以s为基础的n
×
1维移位向量,
[0031][0032]
④
计算即可得到第m个脉冲、第l次迭代时第d个距离采样点的幅度值估计其中,上标h表示向量的共轭转置;
[0033]
⑤
令d=d+1,重复执行步骤
③
至
④
,直到d=d+(3-l)(n-1)停止;得到
[0034]
⑥
令l=l+1,重复执行步骤
③
至
⑤
,直到l=3时停止;得到第m个脉冲对应的自适应脉冲压缩处理结果,记为
[0035]
⑦
令m=m+1,重复执行步骤
②
至
⑥
,直到m=m时停止;得到并以此构建自适应脉冲压缩处理后的数据矩阵,记为并作为迭代自适应rft处理的输入数据,
[0036][0037]
(2)建立速度-距离二维搜索网格,在自适应脉冲压缩后的脉冲-距离二维输出数据矩阵中,搜索和提取每个网格点对应的相参脉冲串数据;本步骤的具体操作如下:
[0038]
①
建立距离搜索网格
[0039]
利用发射波形的距离分辨率δr和回波数据的距离采样点数d,建立距离搜索网格,其中第d个距离网格点对应的距离值为,1≤d≤d;
[0040]
②
建立速度搜索网格
[0041]
用v
max
表示所关心的目标最大速度;速度网格的大小记为δv,其中λ表示载频波长,t表示脉冲重复周期;由此建立速度搜索网格,其中第q个速度网格点对应的速度值为,度值为,《
·
》表示四舍五入运算;
[0042]
③
利用
①
形成的距离搜索网格点和
②
形成的速度搜索网格点,组合形成速度-距离二维搜索网格;
[0043]
④
根据每一个速度-距离二维搜索网格(q,d),1≤q≤q,1≤d≤d,按照下式中各元素的下标在数据矩阵中进行搜索,得到该网格点对应的相参脉冲串数据,记为z
(q,d)
,1≤q≤q,1≤d≤d,
[0044][0045]
其中表示向上取整运算,下标(q,d)表示所针对的网格点;
[0046]
(3)在迭代自适应地求解速度-距离二维搜索网格中每个网格点对应的相参积累权向量的基础上,结合每个网格点对应的相参脉冲串数据,计算得到对应于每个网格点的基于自适应脉冲压缩与迭代自适应rft级联处理的幅度值估计;本步骤的具体操作如下:
[0047]
①
利用速度-距离二维搜索网格(q,d)中的速度值vq确定的多普勒滤波器对该网格点所对应的相参脉冲串数据z
(q,d)
进行相参积累,得到累,得到表示第p=0次迭代自适应rft处理输出的对应于网格点(q,d)
的幅度值估计;遍历所有的速度-距离二维搜索网格点,即可得到第0次迭代自适应rft处理输出的幅度值估计矩阵
[0048][0049]
②
自适应rft处理在实施第p次迭代时,首先计算网格点(q,d)对应的相参积累权向量,然后计算即可得到第p次迭代时,速度-距离网格点(q,d)对应的幅度值估计其中,表示脉间的回波协方差矩阵,im为m
×
m维单位阵,表示脉间的信号协方差矩阵,其中,表示第p次迭代时,与速度-距离网格(q,d)有关的所有相参脉冲串数据之和,
[0050][0051]
其中,上标(p)表示第p次迭代,表示hadamard积,表示第p-1次迭代时得到的速度-距离网格点(j,k)的幅度值估计,当p=1时,就是indicator[(q,d),(j,k)]表示一个m
×
1维的指示向量,用来描述网格点(j,k)对应的相参脉冲串数据z
(j,k)
与网格点(q,d)的相参脉冲串数据z
(q,d)
的相互重叠情况;
[0052]
下面依据说明书附图中的图2,阐述指示向量的含义:速度-距离网格点(q,d)对应的相参脉冲串数据在数据矩阵中的位置如说明书附图2中从左上到右下贯穿的阴影区域所示,速度-距离网格点(j,k)对应的相参脉冲串数据在数据矩阵中的位置如说明书附图2中从右上到做左贯穿的阴影区域所示;由图可知,左上到右下贯穿的阴影区域与右上到做左贯穿的阴影区域在第3和第4个脉冲处发生重叠,因此,得到m
×
1维指示向量indicator[(q,d),(j,k)]为,
[0053][0054]
即,第3和第4个元素为1,其余元素为0;
[0055]
③
令d=d+1,重复执行步骤
②
,直到d=d时停止;得到第p次迭代rft处理、第q个速
度网格对应的d个幅度值估计形成的向量
[0056]
④
令q=q+1,重复执行步骤
②
至
③
,直到q=q时停止;得到即为第p次迭代自适应rft处理输出的幅度值估计矩阵;
[0057]
⑤
令p=p+1,重复执行步骤
②
至
④
,直到p=7时停止;得到即为基于apc与iarft级联处理的雷达目标旁瓣抑制方法的最终处理结果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1