一种利用激光信号进行检测的装置及方法与流程
本发明涉及测量,具体涉及一种利用激光信号进行检测的装置及方法。
背景技术:
1、在当前的生产生活中,三维信息的检测是必不可少的。目前现有的三维检测方案,很大一部分都是手工检测,效率比较低;并且,对于一些精密仪器的检测,接触式测量设备不仅不容易安装,而且还会对被测物体表面产生划痕等,所以基于光学的非接触式测量技术得到了飞速发展,该技术已经广泛应用于产品的设计制造、质量检测等领域。
2、现有基于光学的三维检测方案,检测的精度不高,容易出现错误。
技术实现思路
1、本发明正是基于上述问题,提出了一种利用激光信号进行检测的装置及方法,通过本发明实施例的方案,通过利用激光信号得到高精度的激光点云数据提高了检测精度。
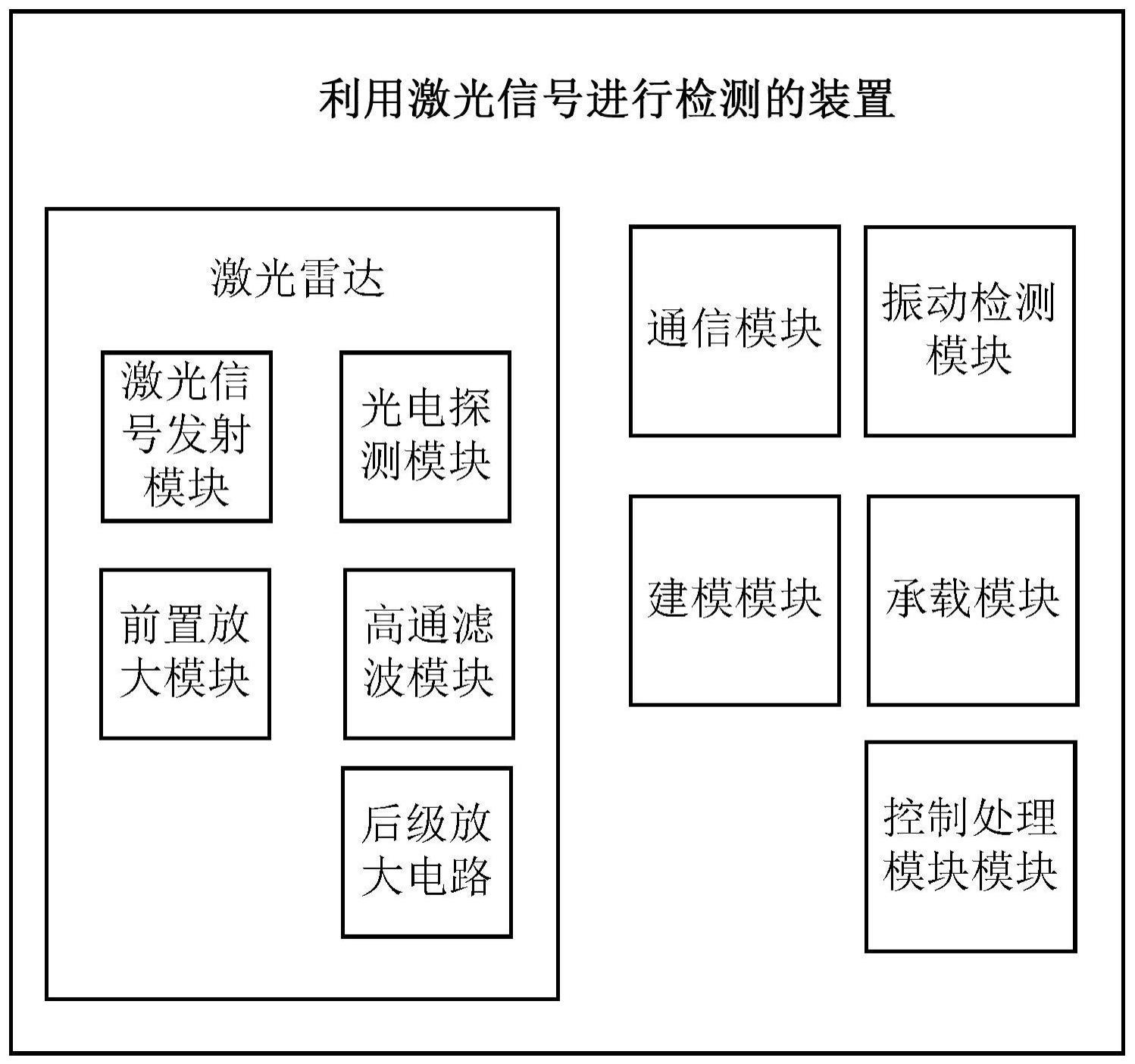
2、有鉴于此,本发明的一方面提出了一种利用激光信号进行检测的装置,包括至少一个用于获取点云数据的激光雷达、用于通过通信网络发送和接收数据的通信模块、用于根据第二激光信号建立三维模型的建模模块、用于采集振动数据的振动检测模块、用于承载待检测物的承载模块和控制处理模块模块,所述激光雷达包括用于发射第一激光信号的激光信号发射模块、用于采集激光信号以将激光信号转化为电信号的光电探测模块、用于将电信号进行放大的前置放大模块、用于对电信号进行降噪的高通滤波模块和用于对电信号进行优化的后级放大电路;其中,
3、所述控制处理模块被配置为:
4、选择待检测物品的多个标准样品;
5、通过第一激光雷达扫描获取所述多个标准样品的多个第一点云数据;
6、从所述多个第一点云数据中选择与所述待检测物品的标准物理参数差值最小的基准点云数据建立所述待检测物品的基准三维模型;
7、分别利用所述多个第一点云数据中除所述基准点云数据外的其他第一点云数据建立所述待检测物品的多个参考三维模型;
8、在所述基准三维模型上确定基准检测区域,并在所述多个参考三维模型中的各个参考三维模型上确定对应的多个参考检测区域;
9、通过第二激光雷达获取所述待检测物品的第二点云数据;
10、根据所述第二点云数据重构所述待检测物品的待检测三维模型;
11、根据所述基准三维模型和所述多个参考三维模型的总数,复制相同数量的所述待检测三维模型得到多个复制三维模型;
12、将所述多个复制三维模型中的一个调整成与所述基准三维模型规格相同,得到第一复制三维模型,并将其余的复制三维模型分别调整成与所述多个参考三维模型规格相同,得到多个第二复制三维模型;
13、根据所述基准检测区域从所述第一复制三维模型上确定第一检测区域;
14、根据所述多个参考检测区域分别从所述多个第二复制三维模型确定多个第二检测区域;
15、将所述基准检测区域和所述第一检测区域进行比对得到第一比对结果,和/或,分别将所述多个参考检测区域和对应的所述多个第二检测区域进行比对得到第二比对结果;
16、根据所述第一比对结果和/或所述第二比对结果输出检测报告数据。
17、可选地,所述在所述基准三维模型上确定基准检测区域,并在所述多个参考三维模型中的各个参考三维模型上确定对应的多个参考检测区域的步骤,所述处理模块被配置为:
18、在所述基准三维模型上确定多个第一基准检测区域,并对应在各个所述多个参考三维模型上分别确定对应的多个第一参考检测区域;
19、确定所述多个第一基准检测区域中每个第一基准检测区域的所有第一基准坐标值、所有所述第一基准坐标值间的第一点关联关系、多个第一基准点和所述每个第一基准检测区域间的第一区域关联关系;
20、对于各个所述多个参考三维模型,分别确定每个参考三维模型上各个所述多个第一参考检测区域中每个第一参考检测区域的所有第一参考坐标值、所有所述第一参考坐标值间的第二点关联关系、多个第一参考基准点和所述每个第一参考检测区域间的第二区域关联关系;
21、将所述多个第一基准检测区域作为所述基准检测区域;
22、分别将所述多个参考三维模型中各个参考三维模型上的所述多个第一参考检测区域作为所述多个参考三维模型中各个参考三维模型上各自的参考检测区域以得到所述多个参考检测区域。
23、可选地,所述根据所述基准检测区域从所述第一复制三维模型上确定第一检测区域的步骤,所述处理模块被配置为:
24、根据所述基准检测区域的所述多个第一基准点确定所述第一复制三维模型上的多个第一复制基准点;
25、根据所述多个第一复制基准点、所有所述第一基准坐标值间的第一点关联关系,确定多个第一复制检测区域;
26、根据所述多个第一复制检测区域与所述每个第一基准检测区域间的第一区域关联关系,确定所述第一检测区域。
27、可选地,所述根据所述多个参考检测区域分别从所述多个第二复制三维模型确定多个第二检测区域的步骤,所述处理模块被配置为:
28、对于所述多个第二复制三维模型中的各个第二复制三维模型,分别执行如下步骤以确定所述多个第二检测区域:
29、从所述多个第一参考基准点中选取对应的第一参考基准点;
30、根据所述对应的第一参考基准点确定所述多个第二复制三维模型中对应的第二复制三维模型上对应的多个第二复制基准点;
31、根据所述多个第二复制基准点、所有所述第一参考坐标值间的第二点关联关系,确定多个第二复制检测区域;
32、根据所述多个第二复制检测区域与所述每个第一参考检测区域间的第二区域关联关系,确定一个所述第二检测区域。
33、可选地,所述将所述基准检测区域和所述第一检测区域进行比对得到第一比对结果,和/或,分别将所述多个参考检测区域和对应的所述多个第二检测区域进行比对得到第二比对结果的步骤,所述处理模块被配置为:
34、获取所述第一检测区域内的所有检测点的第一检测坐标值,并将所述第一检测坐标值存入第一队列;
35、获取所述基准检测区域内的所有所述第一基准坐标值,并将所述第一基准坐标值存入第二队列;
36、逐个计算所述第一队列中的坐标值代表的坐标点与所述第二队列中的坐标值代表的坐标点间的距离,得到第一距离集;
37、对所述第一距离集进行统计与分析,确定距离值集中度达到第一预设集中度的第一距离值;
38、选择出距离值为第一距离值的坐标点对,对并所述坐标点对添加第一编号;
39、根据所述第一编号分别对所述基准检测区域内和所述第一检测区域内的所有坐标点进行排序,分别得到第一基准检测坐标集和第一检测坐标集;
40、分别对所述第一基准检测坐标集和第一检测坐标集进行拟合,并对拟合后的结果进行比对,得到所述第一比对结果;
41、当所述第一比对结果不符合第一阈值时,分别将所述多个参考检测区域和对应的所述多个第二检测区域进行比对得到第二比对结果。
42、本发明的另一方面提供一种利用激光信号进行检测的方法,所述方法包括:
43、选择待检测物品的多个标准样品;
44、通过第一激光雷达扫描获取所述多个标准样品的多个第一点云数据;
45、从所述多个第一点云数据中选择与所述待检测物品的标准物理参数差值最小的基准点云数据建立所述待检测物品的基准三维模型;
46、分别利用所述多个第一点云数据中除所述基准点云数据外的其他第一点云数据建立所述待检测物品的多个参考三维模型;
47、在所述基准三维模型上确定基准检测区域,并在所述多个参考三维模型中的各个参考三维模型上确定对应的多个参考检测区域;
48、通过第二激光雷达获取所述待检测物品的第二点云数据;
49、根据所述第二点云数据重构所述待检测物品的待检测三维模型;
50、根据所述基准三维模型和所述多个参考三维模型的总数,复制相同数量的所述待检测三维模型得到多个复制三维模型;
51、将所述多个复制三维模型中的一个调整成与所述基准三维模型规格相同,得到第一复制三维模型,并将其余的复制三维模型分别调整成与所述多个参考三维模型规格相同,得到多个第二复制三维模型;
52、根据所述基准检测区域从所述第一复制三维模型上确定第一检测区域;
53、根据所述多个参考检测区域分别从所述多个第二复制三维模型确定多个第二检测区域;
54、将所述基准检测区域和所述第一检测区域进行比对得到第一比对结果,和/或,分别将所述多个参考检测区域和对应的所述多个第二检测区域进行比对得到第二比对结果;
55、根据所述第一比对结果和/或所述第二比对结果输出检测报告数据。
56、可选地,所述在所述基准三维模型上确定基准检测区域,并在所述多个参考三维模型中的各个参考三维模型上确定对应的多个参考检测区域的步骤,包括:
57、在所述基准三维模型上确定多个第一基准检测区域,并对应在各个所述多个参考三维模型上分别确定对应的多个第一参考检测区域;
58、确定所述多个第一基准检测区域中每个第一基准检测区域的所有第一基准坐标值、所有所述第一基准坐标值间的第一点关联关系、多个第一基准点和所述每个第一基准检测区域间的第一区域关联关系;
59、对于各个所述多个参考三维模型,分别确定每个参考三维模型上各个所述多个第一参考检测区域中每个第一参考检测区域的所有第一参考坐标值、所有所述第一参考坐标值间的第二点关联关系、多个第一参考基准点和所述每个第一参考检测区域间的第二区域关联关系;
60、将所述多个第一基准检测区域作为所述基准检测区域;
61、分别将所述多个参考三维模型中各个参考三维模型上的所述多个第一参考检测区域作为所述多个参考三维模型中各个参考三维模型上各自的参考检测区域以得到所述多个参考检测区域。
62、可选地,所述根据所述基准检测区域从所述第一复制三维模型上确定第一检测区域的步骤,包括:
63、根据所述基准检测区域的所述多个第一基准点确定所述第一复制三维模型上的多个第一复制基准点;
64、根据所述多个第一复制基准点、所有所述第一基准坐标值间的第一点关联关系,确定多个第一复制检测区域;
65、根据所述多个第一复制检测区域与所述每个第一基准检测区域间的第一区域关联关系,确定所述第一检测区域。
66、可选地,所述根据所述多个参考检测区域分别从所述多个第二复制三维模型确定多个第二检测区域的步骤,包括:
67、对于所述多个第二复制三维模型中的各个第二复制三维模型,分别执行如下步骤以确定所述多个第二检测区域:
68、从所述多个第一参考基准点中选取对应的第一参考基准点;
69、根据所述对应的第一参考基准点确定所述多个第二复制三维模型中对应的第二复制三维模型上对应的多个第二复制基准点;
70、根据所述多个第二复制基准点、所有所述第一参考坐标值间的第二点关联关系,确定多个第二复制检测区域;
71、根据所述多个第二复制检测区域与所述每个第一参考检测区域间的第二区域关联关系,确定一个所述第二检测区域。
72、可选地,所述将所述基准检测区域和所述第一检测区域进行比对得到第一比对结果,和/或,分别将所述多个参考检测区域和对应的所述多个第二检测区域进行比对得到第二比对结果的步骤,包括:
73、获取所述第一检测区域内的所有检测点的第一检测坐标值,并将所述第一检测坐标值存入第一队列;
74、获取所述基准检测区域内的所有所述第一基准坐标值,并将所述第一基准坐标值存入第二队列;
75、逐个计算所述第一队列中的坐标值代表的坐标点与所述第二队列中的坐标值代表的坐标点间的距离,得到第一距离集;
76、对所述第一距离集进行统计与分析,确定距离值集中度达到第一预设集中度的第一距离值;
77、选择出距离值为第一距离值的坐标点对,对并所述坐标点对添加第一编号;
78、根据所述第一编号分别对所述基准检测区域内和所述第一检测区域内的所有坐标点进行排序,分别得到第一基准检测坐标集和第一检测坐标集;
79、分别对所述第一基准检测坐标集和第一检测坐标集进行拟合,并对拟合后的结果进行比对,得到所述第一比对结果;
80、当所述第一比对结果不符合第一阈值时,分别将所述多个参考检测区域和对应的所述多个第二检测区域进行比对得到第二比对结果。
81、采用本发明的技术方案,利用激光信号进行检测的装置包括至少一个用于获取点云数据的激光雷达、用于通过通信网络发送和接收数据的通信模块、用于根据第二激光信号建立三维模型的建模模块、用于采集振动数据的振动检测模块、用于承载待检测物的承载模块和控制处理模块模块,所述激光雷达包括用于发射第一激光信号的激光信号发射模块、用于采集激光信号以将激光信号转化为电信号的光电探测模块、用于将电信号进行放大的前置放大模块、用于对电信号进行降噪的高通滤波模块和用于对电信号进行优化的后级放大电路。通过本发明实施例的方案,通过利用激光信号得到高精度的激光点云数据提高了检测精度。
- 还没有人留言评论。精彩留言会获得点赞!