用于估计设备姿态的方法和装置与流程
本申请涉及计算机,尤其涉及用于估计设备姿态的方法和装置。
背景技术:
1、位姿可以用于描述头戴显示设备、机器人等电子设备在指定坐标系下的位置和姿态。相关技术中,各电子设备在使用过程中可以通过计算机视觉技术进行位姿追踪。并且,位姿追踪的准确程度可以影响用户在使用头戴显示设备的交互沉浸感以及机器人导航的准确性等。因此,在电子设备使用过程中,提高检测到的设备位姿的准确性成为目前亟需解决的技术问题。
技术实现思路
1、本公开的实施例提出了用于估计设备姿态的方法和装置。
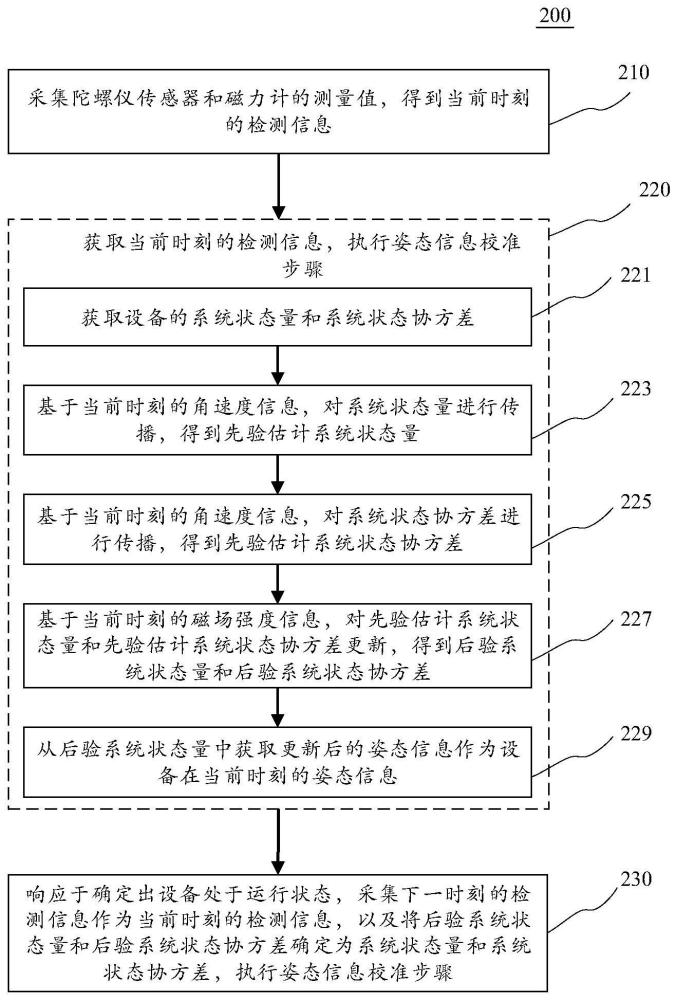
2、第一方面,本公开的实施例提供了一种用于估计设备姿态的方法,设备包括陀螺仪传感器和磁力计,该方法包括:采集陀螺仪传感器和磁力计的测量值,得到当前时刻的检测信息,其中,检测信息包括角速度信息和磁场强度信息;获取当前时刻的检测信息,执行姿态信息校准步骤:获取设备的系统状态量和系统状态协方差,其中,系统状态量包括设备的姿态信息、陀螺仪偏置和磁力计内参偏置;基于当前时刻的角速度信息,对系统状态量进行传播,得到先验估计系统状态量;基于当前时刻的角速度信息,对系统状态协方差进行传播,得到先验估计系统状态协方差;基于当前时刻的磁场强度信息,对先验估计系统状态量和先验估计系统状态协方差更新,得到后验系统状态量和后验系统状态协方差;从后验系统状态量中获取更新后的姿态信息作为设备在当前时刻的姿态信息;响应于确定出设备处于运行状态,获取下一时刻的检测信息作为当前时刻的检测信息,以及将后验系统状态量和后验系统状态协方差确定为系统状态量和系统状态协方差,执行姿态信息校准步骤。
3、第二方面,本公开的实施例提供了一种用于估计设备姿态的装置,设备包括陀螺仪传感器和磁力计,该装置包括:采集单元,被配置成采集陀螺仪传感器和磁力计的测量值,得到当前时刻的检测信息,其中,检测信息包括角速度信息和磁场强度信息;获取单元,被配置成获取当前时刻的检测信息,执行姿态信息校准步骤:获取设备的系统状态量和系统状态协方差,其中,系统状态量包括设备的姿态信息、陀螺仪偏置和磁力计内参偏置;基于当前时刻的角速度信息,对系统状态量进行传播,得到先验估计系统状态量;基于当前时刻的角速度信息,对系统状态协方差进行传播,得到先验估计系统状态协方差;基于当前时刻的磁场强度信息,对先验估计系统状态量和先验估计系统状态协方差更新,得到后验系统状态量和后验系统状态协方差;从后验系统状态量中获取更新后的姿态信息作为设备在当前时刻的姿态信息;确定单元,被配置成响应于确定出设备处于运行状态,获取下一时刻的检测信息作为当前时刻的检测信息,以及将后验系统状态量和后验系统状态协方差确定为系统状态量和系统状态协方差,执行姿态信息校准步骤。
4、第三方面,本公开的实施例提供了一种电子设备,包括:一个或多个处理器;存储装置,其上存储有一个或多个程序,当一个或多个程序被一个或多个处理器执行,使得一个或多个处理器实现上述用于估计设备姿态的方法。
5、第四方面,本公开的实施例提供了一种存储有计算机指令的非瞬时计算机可读存储介质,其中,计算机指令用于使计算机执行上述用于估计设备姿态的方法。
6、第五方面,本公开的实施例提供了一种计算机程序产品,包括计算机程序/指令,其中,该计算机程序/指令被处理器执行时实现上述用于估计设备姿态的方法。
技术特征:
1.一种用于估计设备姿态的方法,所述设备包括陀螺仪传感器和磁力计,所述方法包括:
2.根据权利要求1所述的方法,其中,所述设备还包括加速度传感器,所述检测信息还包括加速度信息,所述方法还包括:
3.根据权利要求1所述的方法,其中,所述基于当前时刻的角速度信息,对所述系统状态量进行传播,得到先验估计系统状态量,包括:
4.根据权利要求1-3之一所述的方法,其中,所述系统状态量还包括环境磁场信息;
5.根据权利要求1所述的方法,其中,所述方法还包括:
6.一种用于估计设备姿态的装置,所述设备包括陀螺仪传感器和磁力计,所述装置包括:
7.根据权利要求6所述的装置,其中,所述系统状态量还包括环境磁场信息;
8.一种电子设备,包括:
9.一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行权利要求1-5中任一项所述的方法。
10.一种计算机程序产品,包括计算机程序/指令,其中,该计算机程序/指令被处理器执行时实现权利要求1-5中任一项所述的方法。
技术总结
本申请公开了用于估计设备姿态的方法。具体实现方案为:采集陀螺仪传感器和磁力计的测量值,得到当前时刻的检测信息;获取当前时刻的检测信息,执行姿态信息校准步骤:获取设备的系统状态量和系统状态协方差;基于当前时刻的角速度信息,对系统状态量进行传播,得到先验估计系统状态量;基于当前时刻的角速度信息,对系统状态协方差进行传播,得到先验估计系统状态协方差;基于当前时刻的磁场强度信息,对先验估计系统状态量和先验估计系统状态协方差更新,得到后验系统状态量和后验系统状态协方差;从后验系统状态量中获取更新后的姿态信息作为设备在当前时刻的姿态信息;响应于确定出设备处于运行状态,循环执行姿态信息校准步骤。
技术研发人员:黄灿
受保护的技术使用者:优奈柯恩(北京)科技有限公司
技术研发日:
技术公布日:2024/5/20
- 还没有人留言评论。精彩留言会获得点赞!