一种基于运动车辆的煤炭采制方法、设备及介质与流程
本说明书涉及煤炭采制,尤其涉及一种基于运动车辆的煤炭采制方法、设备及介质。
背景技术:
1、煤炭是煤矿、电厂、港口、冶炼、化工等行业的主要产品和生产原料,准确的煤炭品质是上述各行业安全生产、成本核算、流通交易的首要依据,而煤炭分析是煤炭质量监测和质量控制的基础工作,煤质的分析实际上是一种抽样分析的过程。煤炭是一种不均匀的物质(粒度、质量特性分布等),被抽样的母本一般比较大(几十吨到几万吨不等),最大限度地抽到能代表整个母本质量及特性的代表性样品的过程叫采样。采样之后的煤样,通过制样设备的制样处理,得到最终的煤样。
2、火车或汽车采样,主要有皮带采样和门式采样两种方式。皮带采样是在皮带上进行采样,这种采样的弊端是样品与最后装车的煤样存在一定的区别,与客户提供的采样数据有一定的误差,不具有严格的代表性;门式采样的缺点是采样周期比较长,且需要火车或汽车静止方可采样,严重约束了采样效率,这种采样方式的另一个缺点是无法做到自动采样,需要人工进行操作。综上可知,现有的采制样方式需要在运煤车辆静止的情况下采样,采样效率较低。
技术实现思路
1、本说明书一个或多个实施例提供了一种基于运动车辆的煤炭采制方法、设备及介质,用于解决如下技术问题:现有的采制样方式需要在运煤车辆静止的情况下采样,采样效率较低。
2、本说明书一个或多个实施例采用下述技术方案:
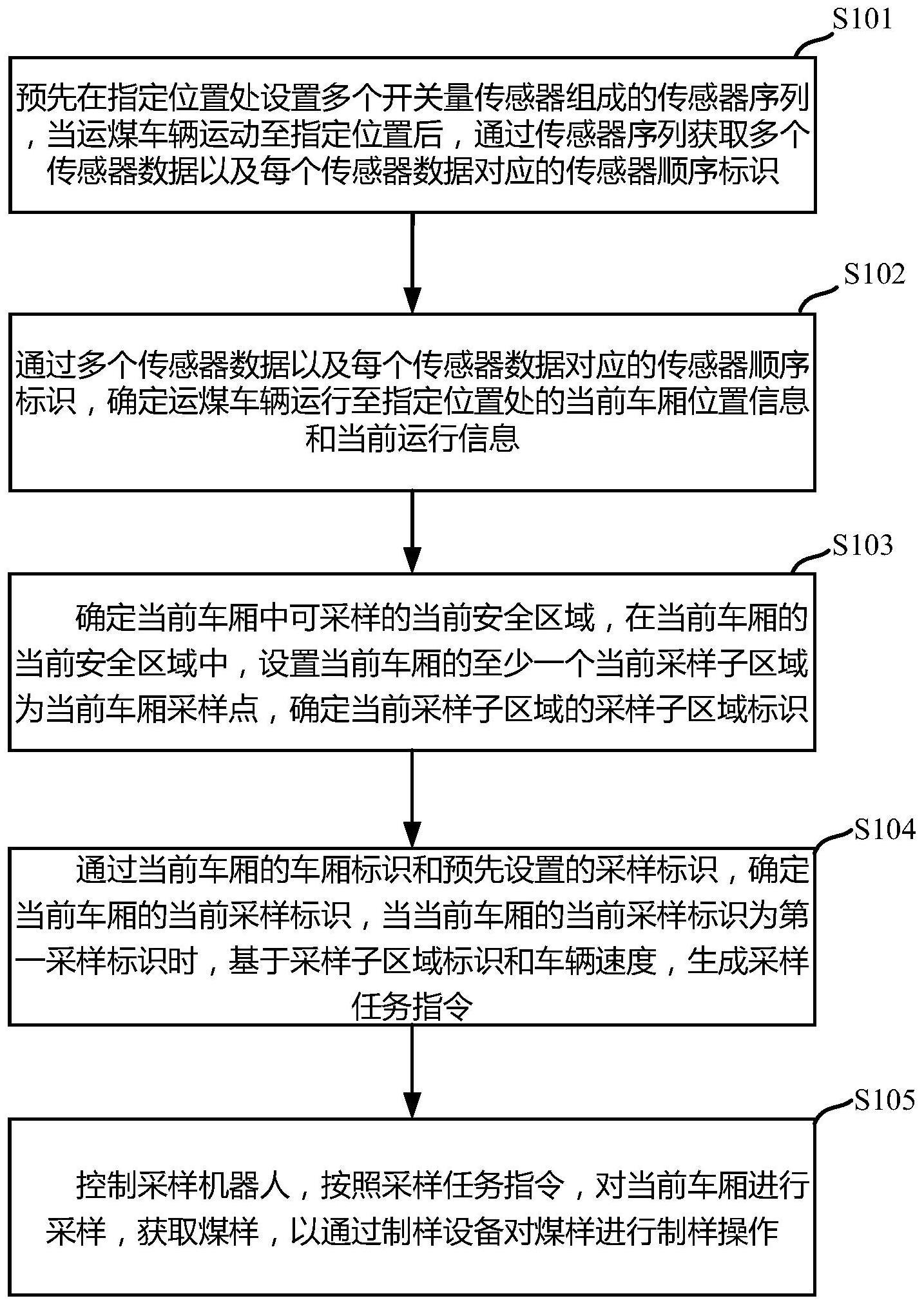
3、本说明书一个或多个实施例提供一种基于运动车辆的煤炭采制方法,所述方法包括:预先在指定位置处设置多个开关量传感器组成的传感器序列,当运煤车辆运动至所述指定位置后,通过所述传感器序列获取多个传感器数据以及每个传感器数据对应的传感器顺序标识;通过所述多个传感器数据以及每个传感器数据对应的传感器顺序标识,确定所述运煤车辆运行至所述指定位置处的当前车厢位置信息和当前运行信息,其中,所述当前车厢位置信息包括所述当前车厢的车厢标识,所述当前运行信息包括车辆速度;确定所述当前车厢中可采样的当前安全区域,在所述当前车厢的当前安全区域中,设置所述当前车厢的至少一个当前采样子区域为当前车厢采样点,确定所述当前采样子区域的采样子区域标识;通过所述当前车厢的车厢标识和预先设置的采样标识,确定当前车厢的当前采样标识,当所述当前车厢的当前采样标识为第一采样标识时,基于所述采样子区域标识和所述车辆速度,生成采样任务指令,其中,所述第一采样标识用于表示当前车厢为未采样状态;控制采样机器人,按照所述采样任务指令,对所述当前车厢进行采样,获取煤样,以通过制样设备对所述煤样进行制样操作。
4、进一步地,预先在指定位置处设置多个开关量传感器组成的传感器序列,具体包括:获取所述运煤车辆的单个车厢长度;基于所述运煤车辆的单个车厢长度,在所述运煤车辆的指定侧,等间距设置多个开关量传感器,其中,所述指定侧为所述运煤车辆与所述采样机器人相邻的一侧;基于所述多个开关量传感器,组成传感器序列,其中,相邻开关量传感器之间的间距为指定数值,所述开关量传感器的数量为预设数值,且所述预设数值个开关量传感器组成的传感器序列的长度大于所述单个车厢长度;对每个开关量传感器依次设置传感器顺序标识。
5、进一步地,通过所述多个传感器数据以及每个传感器数据对应的传感器顺序标识,确定所述运煤车辆运行至所述指定位置处的当前车厢位置信息和当前运行信息,具体包括:获取每个开关量传感器在多个时刻下分别对应的传感器数据;根据相邻时刻下的多个传感器数据和每个开关量传感器的传感器顺序标识,确定所述运煤车辆运行至所述指定位置处的当前车厢位置信息;根据每个开关量传感器在多个时刻下分别对应的传感器数据,确定相邻开关量传感器对应的传感器数据;根据相邻开关量传感器对应的传感器数据,计算所述运煤车辆的当前运行速度。
6、进一步地,确定所述当前车厢中可采样的当前安全区域,具体包括:在多个传感器数据中,确定出传感器数据为无遮挡数据的开关量传感器的两个无遮挡传感器顺序标识,按照顺序标识从大到小的顺序,定义为第一无遮挡标识和第二无遮挡标识;并确定出所述采样机器人对应的当前传感器顺序标识;基于所述两个无遮挡传感器顺序标识,确定所述两个无遮挡传感器之间的传感器数量;根据所述传感器数量,确定当前车厢的实际车厢长度;获取预先设置的车厢头预警区域和车厢尾预警区域,基于所述实际车厢长度、当前传感器顺序标识、车厢头预警区域和车厢尾预警区域,计算所述当前车厢中可采样的安全区域。
7、进一步地,通过所述当前车厢的车厢标识和预先设置的采样标识,确定当前车厢的当前采样标识之前,所述方法还包括:预先设置第一采样标识和第二采样标识,其中,所述第一采样标识用于表示未采样状态,所述第二采样标识用于表示采样状态;将运煤车辆中每个车厢的采样标识进行初始化,将每个车厢的采样标识均设置为第一采样标识;当运煤车辆运行至当前采样点时,确定当前采样点对应采样车厢的采样标识;当所述当前采样点对应的采样车厢的采样标识为所述第二采样标识时,则判定所述采样车厢为已采样状态,并对下一采样点进行采样判断;当所述当前采样点对应的采样车厢的采样标识为所述第一采样标识时,则对所述采样车厢设置待采样的子区域标识,以便于采样机器人按照所述待采样的子区域标识对所述采样车厢进行采样,并在采样后将采样车厢的采样标识设置为第二标识,其中,所述第二标识用于表示当前采样车厢为已采样状态。
8、进一步地,根据相邻时刻下的多个传感器数据,确定所述运煤车辆运行至所述指定位置处的当前车厢位置信息,具体包括:在所述传感器序列中,确定与所述采样机器人的对应的多个指定开关量传感器;预先将所述多个指定开关量传感器,分为三个区域,分别为第一区域、第二区域和第三区域,每个区域内包括至少两个指定开关量传感器;获取所述多个指定开关量传感器在第一时刻分别对应的多个指定传感器数据,以及在第二时刻分别对应的多个预设传感器数据,其中所述第一时刻为所述第二时刻的前一时刻;根据所述多个指定传感器数据,获取无遮挡数据对应的第一指定传感器,确定所述第一指定传感器在所述传感序列中的指定传感器标识;根据所述多个预设传感器数据,获取无遮挡数据对应的第一预设传感器,确定所述第一预设传感器在所述传感序列中的预设传感器标识;通过所述指定传感器标识,确定所述第一指定传感器的指定所属区域,通过所述预设传感器标识,确定所述第一预设传感器的预设所属区域;根据所述指定所属区域、所述预设所属区域以及预先获取的运煤车辆的运行方向,确定所述运煤车辆的车厢标识,其中,所述车厢标识为由小到大依次排列的正整数;根据所述运煤车辆的车厢标识,确定所述运煤车辆运行至所述指定位置处的当前车厢位置信息。
9、进一步地,通过所述指定传感器标识,确定所述第一指定传感器的指定所属区域,通过所述预设传感器标识,确定所述第一预设传感器的预设所属区域,具体包括:获取所述多个指定开关量传感器的传感器顺序标识;计算第一区域内的多个指定开关量传感器的顺序标识的平均值,作为第一区域标识均值;计算第二区域内的多个指定开关量传感器的顺序标识的平均值,作为第二区域标识均值;计算第三区域内的多个指定开关量传感器的顺序标识的平均值,作为第三区域标识均值;将所述指定传感器标识分别与所述第一区域标识均值、所述第二区域标识均值以及所述第三区域标识均值进行比较,确定所述第一指定传感器的指定所属区域;将所述预设传感器标识分别与所述第一区域标识均值、所述第二区域标识均值以及所述第三区域标识均值进行比较,确定所述第一预设传感器的预设所属区域。
10、进一步地,根据相邻开关量传感器对应的传感器数据,计算所述运煤车辆的当前运行速度,具体包括:根据相邻开关量传感器对应的传感器数据,确定每个相邻开关量传感器对应的传感器数据发生变化的时间;通过每个相邻开关量传感器对应的传感器数据发生变化的时间,计算两个相邻开关量传感器发生变化的时间差;基于所述时间差与所述相邻开关量传感器之间的间距,计算所述运煤车辆的当前运行速度。
11、本说明书一个或多个实施例提供一种基于运动车辆的煤炭采制设备,包括:
12、至少一个处理器;以及,
13、与所述至少一个处理器通信连接的存储器;其中,
14、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够:
15、预先在指定位置处设置多个开关量传感器组成的传感器序列,当运煤车辆运动至所述指定位置后,通过所述传感器序列获取多个传感器数据以及每个传感器数据对应的传感器顺序标识;通过所述多个传感器数据以及每个传感器数据对应的传感器顺序标识,确定所述运煤车辆运行至所述指定位置处的当前车厢位置信息和当前运行信息,其中,所述当前车厢位置信息包括所述当前车厢的车厢标识,所述当前运行信息包括车辆速度;确定所述当前车厢中可采样的当前安全区域,在所述当前车厢的当前安全区域中,设置所述当前车厢的至少一个当前采样子区域为当前车厢采样点,确定所述当前采样子区域的采样子区域标识;通过所述当前车厢的车厢标识和预先设置的采样标识,确定当前车厢的当前采样标识,当所述当前车厢的当前采样标识为第一采样标识时,基于所述采样子区域标识和所述车辆速度,生成采样任务指令,其中,所述第一采样标识用于表示当前车厢为未采样状态;控制采样机器人,按照所述采样任务指令,对所述当前车厢进行采样,获取煤样,以通过制样设备对所述煤样进行制样操作。
16、本说明书一个或多个实施例提供的一种非易失性计算机存储介质,存储有计算机可执行指令,所述计算机可执行指令设置为:
17、预先在指定位置处设置多个开关量传感器组成的传感器序列,当运煤车辆运动至所述指定位置后,通过所述传感器序列获取多个传感器数据以及每个传感器数据对应的传感器顺序标识;通过所述多个传感器数据以及每个传感器数据对应的传感器顺序标识,确定所述运煤车辆运行至所述指定位置处的当前车厢位置信息和当前运行信息,其中,所述当前车厢位置信息包括所述当前车厢的车厢标识,所述当前运行信息包括车辆速度;确定所述当前车厢中可采样的当前安全区域,在所述当前车厢的当前安全区域中,设置所述当前车厢的至少一个当前采样子区域为当前车厢采样点,确定所述当前采样子区域的采样子区域标识;通过所述当前车厢的车厢标识和预先设置的采样标识,确定当前车厢的当前采样标识,当所述当前车厢的当前采样标识为第一采样标识时,基于所述采样子区域标识和所述车辆速度,生成采样任务指令,其中,所述第一采样标识用于表示当前车厢为未采样状态;控制采样机器人,按照所述采样任务指令,对所述当前车厢进行采样,获取煤样,以通过制样设备对所述煤样进行制样操作。
18、本说明书实施例采用的上述至少一个技术方案能够达到以下有益效果:通过上述技术方案,通过传感器序列中的传感器数据和传感器顺序标识,确定车厢的位置信息和运行信息,并在车厢中设置了可采样的安全区域,避免机器夹具由于运煤车辆的运行状态与车厢头和车厢尾接触,影响采样进程;通过采样标识,避免出现重复采样的情况;此外,在车厢内设置采样点的具体位置,根据车辆运行信息和采样点位置信息,生成采样任务指令,通过采样机器人按照采样任务指令进行采样,解决了采样位置的设定问题,实现精准采样,也进一步提高了采样效率。
- 还没有人留言评论。精彩留言会获得点赞!