一种平衡摆结构、角加速度测量装置及方法与流程
1.本发明属于加速度测量技术领域,具体地涉及一种平衡摆结构、角加速度测量装置及方法。
背景技术:
2.与角位移和角速度相比,角加速度在角运动动态特性表征方面,能够更直接、更快速、更准确地表征角运动的高阶特性,尤其在多扰动、变负载、大过载等复杂工况下,实现对角加速度的高精度、高动态、高可靠的直接测量与分析,能够显著提高系统的精度、稳定性、响应速度等性能。
3.测量角加速度的方法从工作原理上多种多样,按测量对象可分为x类和y类,按测量方法可分为a类、b类和c类。x类为间接测量,测量某一旋转物体的相对角加速度,结构上分为两个组成部分,一部分安装在参照物体上,另一部分安装在作旋转运动的被测物体上,结构复杂,使用不便,主要用于工业设备。y类直接测量旋转物体相对于惯性空间的角加速度,使用方便,主要用于飞行器。a类和b类为间接测量方法,首先检测角位移或角速度,然后通过微分电路或微分计算算法进行微分处理得到角加速度,微分处理必须要有足够的噪声衰减和足够短的延迟特性。由于微分过程特有的噪声放大特性,需要对噪声信号进行高频滤波处理,因此会引入较大的误差,特别是在信号比较微弱时灵敏度下降(即阈值会较大),不适合精度和实时性要求高的场合。c类为直接测量角加速度信号,实时性好,精度高。
4.现有的加速度测量装置在结构和精度上不能兼顾。
技术实现要素:
5.为了解决现有角加速度测量装置结构和精度不能同时兼顾的问题,本发明提供一种平衡摆结构、角加速度测量装置及方法,其不仅结构简单且测量精度高。
6.本发明的目的通过以下技术方案来实现:
7.本发明第一方面提供一种平衡摆结构,包括相互连接且可绕位于连接处的轴转动的第一摆臂和第二摆臂,所述第一摆臂和第二摆臂的重力矩相等。
8.在一种可能的设计中,所述第一摆臂和/或第二摆臂包括第一摆片、第二摆片和连接在第一摆片与第二摆片之间过渡结构,所述第一摆片和第二摆片相垂直;
9.所述第一摆臂和第二摆臂的第一摆片位于同一平面上。
10.进一步的,所述第一摆臂和第二摆臂还包括设置在所述第一摆片或第二摆片上的配重块。
11.在一种可能的设计中,所述第一摆臂和第二摆臂包括摆片,所述第一摆臂和第二摆臂的摆片一体成型且位于同一平面上。
12.进一步的,所述第一摆臂和第二摆臂还包括设置在摆片上配重块。
13.在一种可能的设计中,所述第一摆臂和/或第二摆臂由不导磁金属材料制成。
14.本发明第二方面提供一种加速度测量装置,包括第一方面及其任一可能的设计中
所述的一种平衡摆结构、固定在所述第一摆臂和第二摆臂的轴上的转轴、用于支撑所述转轴的支承部件和用于检测所述平衡摆结构转动时转矩的检测单元。
15.本发明第三方面提供一种角加速度测量方法,包括以下步骤:
16.获取采用第二方面所述的角加速度测量装置采集的转矩数据;
17.根据所述转矩和所述第一摆臂和第二摆臂绕轴转动的转动惯量计算角加速度。
18.本发明与现有技术相比,至少具有以下优点和有益效果:
19.本发明采用两个摆臂结构,通过检测装置检测摆臂转动时的转矩,即可根据转矩和摆臂绕轴转动的转动惯量计算角加速度,结构简单,且精度高。
附图说明
20.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
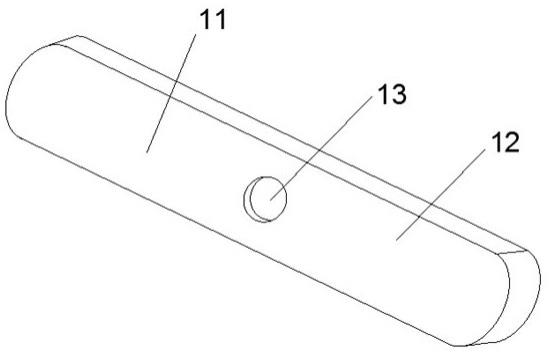
21.图1为本发明平衡摆结构的一结构示意图;
22.图2为本发明平衡摆结构的另一结构示意图;
23.图3为图2中平衡摆结构的摆臂含有配重块时的结构示意图;
24.图4为本发明加速度测量装置的结构示意图,其中未标示出检测单元和转轴;
25.图5为本发明检测单元的立体图;
26.图6为本发明检测单元的俯视图。
具体实施方式
27.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。通常在此处附图中描述和示出的本发明实施方式的组件可以以各种不同的配置来布置和设计。
28.因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
29.需要说明的是,在不冲突的情况下,本发明中的实施方式及实施方式中的特征可以相互组合。
30.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
31.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,或者是本领域技术人员惯常理解的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
32.在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
33.如图1、图2所示,本发明第一方面提供一种平衡摆结构,包括相互连接且可绕位于连接处的轴13转动的第一摆臂11和第二摆臂12,所述第一摆臂11和第二摆臂12的重力矩相等,以保证第一摆臂11和第二摆臂12相对轴的静平衡。第一摆臂11相对于轴的力臂与自身重量的乘积与第二摆臂12相对于轴的力臂与自身重量的乘积相等。
34.基于上述平衡摆结构的原理和结构,第一摆臂11和第二摆臂12可采用多种结构实现,只要满足第一摆臂11和第二摆臂12的重力矩相等即可。具体的,可采用以下方式实现。
35.其一,第一摆臂11和第二摆臂12可采用以下方式实现:如图2所示,两摆臂即第一摆臂11和第二摆臂12均包括3个部分,第一摆片31、第二摆片32和连接在第一摆片31与第二摆片32之间过渡结构,所述第一摆片31和第二摆片32相垂直。第一摆臂11和第二摆臂12的第一摆片31位于同一平面上。第一摆臂11和第二摆臂12采用片状结构,减小尺寸体积,减小重量,将第一摆片31和第二摆片32设置成相垂直的结构,可以减小线加速度的敏感度,提高检测精度。第一摆臂11和第二摆臂12优选的如图2所示,采用一体成型的结构;第一摆臂11和第二摆臂12的过渡结构采用按轴结构对称,以减小线加速度的敏感度。
36.由于该结构是敏感质量体,在小体积小质量的情况下增大平衡摆结构的转动惯量,提高检测精度,所述第一摆臂11和第二摆臂12还包括设置在所述第一摆片31或第二摆片32上的配重块2。如图3所示,优选的,将所述配重块2至于所述第二摆片32上。配重块2可以通过形状、质量的设计和组合,也可通过对安装位置的调整进行精确质量和力臂的调整,以达到轴两侧重力矩平衡。为了便于加工和固定,配重块2优选设计成方形。
37.其二,第一摆臂11和第二摆臂12可采用以下方式实现:如图1所示,第一摆臂11和第二摆臂12包括摆片,所述第一摆臂11和第二摆臂12的摆片一体成型且位于同一平面上。
38.同理,由于该结构是敏感质量体,以在小体积小质量的情况下增加平衡摆结构的转动惯量,提高检测精度,故所述第一摆臂11和第二摆臂12还包括设置在摆片上配重块2。配重块2可以通过形状、质量的设计和组合,也可通过对安装位置的调整进行精确质量和力臂的调整,以达到轴两侧重力矩平衡。为了便于加工和固定,配重块2优选设计成方形。
39.当然,平衡摆结构不仅可采用上述两种结构,还可采用其他第一摆臂11和第二摆臂12的重力矩相等的结构设计。基于此多种结构,为了检测平衡摆结构的位置,所述第一摆臂11和/或第二摆臂12由不导磁金属材料制成。为了提高使用寿命。第一摆臂11和第二摆臂12采用高强度的材料。
40.平衡摆结构中摆臂为检测质量摆,当载体绕输入轴有角加速度输入时,因惯性作用摆片和摆块会产生绕转轴的转矩j为摆臂绕转轴的转动惯量,使摆组件绕转轴转动,通过测量转矩m
t
即可直接、准确地检测角加速度
41.本发明第二方面提供一种角加速度测量装置,如图4所示,包括第一第一方面中任一所述的一种平衡摆结构、固定在所述第一摆臂11和第二摆臂12的轴13上的转轴9、用于支
撑所述转轴9的支承部件42和用于检测所述平衡摆结构转动时转矩的检测单元。
42.支承部件4可采用径向支承和轴向支承分离的微摩擦力矩组合支承结构。
43.检测单元可采用磁力矩器,是一种现有结构,磁力矩器产生的力矩与平衡摆结构转动时的惯性转矩平衡实现检测。
44.本实施例提供一种磁力矩器的优选结构,如图5、6所示,包括磁钢52、绕制在磁钢52四周可绕支撑轴转动的线圈54、用于固定线圈的骨架53、连接在线圈两端的接线座57和导电游丝55,所述导电游丝55以所述线圈54的转轴为圆心成平面螺旋盘绕状,即导电游丝55采用类似于蚊香盘绕的结构。
45.其中,磁钢为定子部分,线圈和骨架为转子部分。线圈54两端的线分别与骨架两端的接线座连接,若接线座固定在骨架上,需在接线座57与骨架之间设置绝缘垫56。绝缘垫56可选用环氧玻璃布板材料。绝缘垫56可用胶粘接在骨架两端,接线座57固定在绝缘垫56上即可。接线座57可采用为环折弯结构,可选用黄铜材料。
46.导电游丝55一端焊接在接线座上,并以所述线圈54的转轴为圆心成螺旋盘绕后引出与接线板连接,接线板为永磁力矩器的外部器件,在图5中并未体现。为保证导电游丝的导电性能,导电游丝由导电性能良好的金属材料制成。由于导电游丝成平面螺旋盘绕状即平面涡卷螺旋结构,可减小导电游丝对摆组件的干扰力矩及高低温稳定性,提高测量精度。
47.磁钢为长方体,由永磁材料制成,为提高力矩器刻度系数及高低温稳定性,优选稀土钴永磁材料。与之匹配的,骨架是由不导磁材料制成的矩形环状结构。材料可选陶瓷、微晶玻璃、非金属聚砜、聚酰亚胺等、铝、铝合金、钛合金等,优选铝合金。
48.线圈可由铜漆包线绕制,可用胶粘接在骨架53上,或者直接绕制在力矩器骨架53上。
49.在上述结构的基础上,为了实现对上述结构的保护,还包括至于整个永磁力矩器外部的保护壳51,所述保护壳51为框架结构。所述保护壳51上设置有用于引出所述导电游丝55和用于设置转轴9的的孔。保护壳51为矩形环状结构,所述保护壳51为软磁保护壳,即保护壳51由软磁材料制成的矩形环状结构。保护壳51为矩形环状结构,是力矩器的导磁磁路,由软磁材料制成,优选铁镍软磁合金。所述保护壳51上设置有凹槽511,用于安装上述平衡摆结构。采用上述结构,框架保护壳和磁钢固定在外部支架上,线圈固定在骨架内。
50.本发明采用框架式结构、单块矩形永磁体、有效减小了力矩器的体积和重量,力矩器线圈通过平面涡卷式导电游丝传输电信号,干扰力矩很小。本发明提供的框架式永磁力矩器具有结构简单、体积小、重量轻、转动惯量小、功耗低等特点。
51.工作时,当通过导电游丝55给线圈54通电时,处于直流磁场中的通电线圈54会产生作用力,使骨架53和线圈54绕支承转轴转动。通过调整线圈54内电流的大小和方向,可以对力矩器的力矩大小和方向的控制,实现对角加速度传感器摆组件的施矩闭环控制。
52.上述结构应用刚体定轴转动定律直接敏感载体绕输入轴的角加速度,具有结构简单、体积小、质量轻、转动惯量大、精度高、动态性能好、环境适应性强、对线加速度不敏感、成本低等优点。
53.采用上述结构,在对角加速度测量进行测量时,按照上述装置的转轴安装在待测物的转轴上实现与待测物同轴转动,获取检测单元采集的的转矩数据;根据所述转矩和所述第一摆臂11和第二摆臂12绕轴转动的转动惯量计算角加速度,即根据即可计
算出角加速度
54.尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1